監控視頻中運動目標的自動檢測、跟蹤和提取
2015-05-30 10:48:04盛家川楊巍海巖
企業技術開發·下旬刊 2015年4期
關鍵詞:卡爾曼濾波
盛家川 楊巍 海巖

摘 要:為了能夠從監控視頻中快速準確地分析運動目標,文章提出了一種新的運動目標自動檢測、跟蹤和提取方法。首先通過混合高斯模型背景差分法獲得運動目標初始二值輪廓。然后結合Kalman濾波和Blob匹配法跟蹤物體的運動軌跡,并用矩形框架標記圖像序列中的運動目標。最后傳遞矩形參數,采用迭代算法實現最優化分割,對運動目標進行準確提取。實驗結果表明,該方法具有較高的魯棒性和準確性。
關鍵詞:目標檢測;混合高斯模型;卡爾曼濾波;GrabCut
中圖分類號:TP277;TP391.41 文獻標識碼:A 文章編號:1006-8937(2015)12-0071-02
隨著人工智能和信息技術的發展,運動目標的檢測、跟蹤和提取在軍事、工業、智能交通和科學研究等諸多領域得到了廣泛的應用,檢測、跟蹤和提取研究逐漸由單目標轉為多目標。
目前,國內外學者在運動目標的檢測、跟蹤和提取的研究領域進行了比較深入的研究,提出了很多有效的算法。[1-2]但在實際應用中,由于自然環境復雜,目標機動性高,在研究運動目標檢測、跟蹤和提取技術時的干擾因素多,容易導致檢測不準確,跟蹤效率不高且信息提取不完整。在對檢測、跟蹤和提取技術的研究現狀和存在的問題進行深入分析的基礎上,本文以混合高斯建模和卡爾曼濾波器為切入點,提出了一種新的運動目標自動檢測、跟蹤和提取算法改進。
1 運動目標自動檢測、跟蹤和提取
基于,混合高斯模型,本文使用背景差分法檢測運動前景,在得到目標初始輪廓的基礎上,采用Kalman濾波器與Blob分析法相結合的方法,實現運動目標的跟蹤。目標跟蹤獲得矩形框架以此為參數進行傳遞,通過運動目標自動提取算法分離視頻幀的前景,獲得運動目標的完整圖像。
1.1 初始輪廓檢測
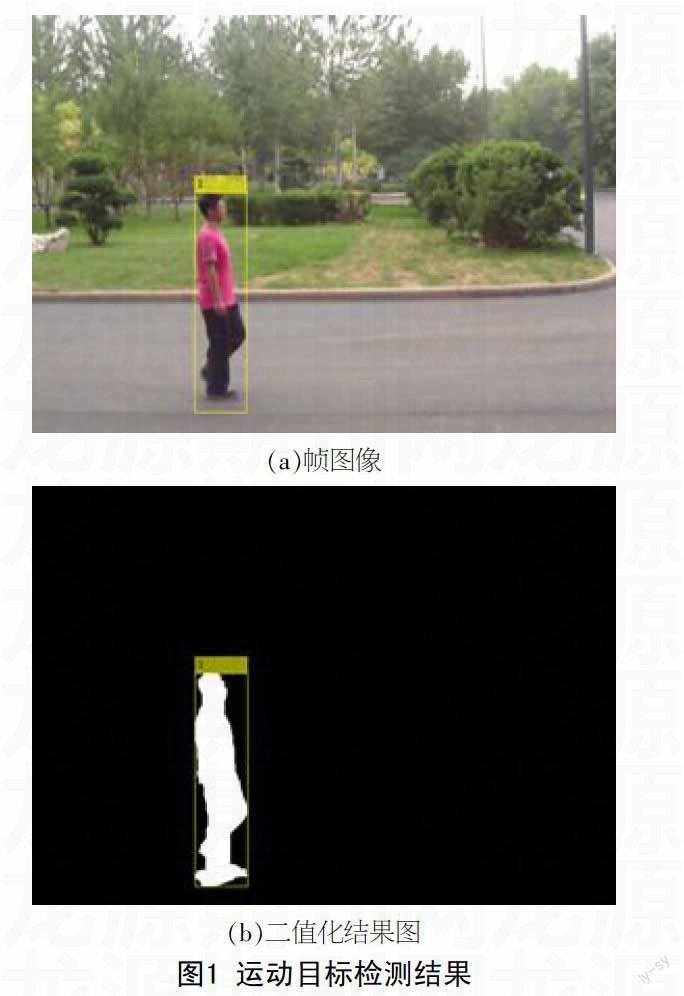
首先通過混合高斯模型得到背景圖像B,用前景圖像I減去背景圖像B,得出差分圖像Id,將圖像Id轉為灰度圖像進行中值濾波,然后利用歸一化的閾值對圖像進行二值處理。得到二值圖像后,對其進行形態學的處理,填補空洞,膨脹與腐蝕,開運算和閉運算,最后得到目標的初始輪廓。
為了驗證算法的有效性,在實驗中采用實際的監控視頻序列進行運動目標檢測,其中用來拍攝的攝像機是靜止的。運動檢測結果如圖1所示,圖1(a)是從監控視頻中提取的一幀圖像,圖1(b)是該幀圖像二值化后的輪廓檢測結果圖。
1.2 基于Kalman濾波器和Blob匹配法的目標跟蹤
本文將Kalman濾波器和Blob匹配法相結合,共同完成運動目標跟蹤,具體算法如下。
①在混合高斯法得到的初始輪廓基礎上,尋找各連通的前景區域,每個區域標記為一個Blob。計算每個Blob的形心位置、輪廓大小以及空間矩特征,將這些Blob編號與其特征一起存儲在一個序列中。同時,本文對每一個Blob塊標記矩形框架,保證剛好覆蓋連通區域,并隨著運動目標的移動不斷更新。
②根據當前幀之前目標形心位置的運動狀況,用Kalman濾波器算法預估各Blob在下一幀將出現的位置。根據從當前幀中測量到的Blob的形心位置和長寬,利用Kalman濾波器對當前幀中Blob的位置進行估計,然后利用該估計值對Blob在下一幀中的位置做出預測。因為相鄰兩幀之間的時間間隔很小,所以假設Blob以一個恒定的速度移動,則該系統是線性動態系統。根據Kalman濾波器等式:
Xt=AXt-1+Wt(1)
Yt=BXt-1+Vt(2)
其中,A是傳遞矩陣,B是測量矩陣,Xt和Xt-1是t時刻和t-1時刻Blob的狀態向量。定義X=(x,y,w,h,dx,dy,dw,dh)T,這里(x,y)是Blob的形心坐標,(w,h)是Blob的大小,而dx,dy,dw,dh分別對應x,y,w,h的速度。同時,定義對Blob標記的矩形框架rect=(x,y,w,h),(x,y)為矩形框架中心坐標,(w,h)為矩形框架的寬度和高度。Wt,Vt是符合高斯分布的N(0,Rt)隨機變量,Yt是測量方程。
③在預估位置附近根據Blob的輪廓形狀、大小、空間矩特征,尋找匹配的Blob。若找到匹配的Blob則將它標記為同一個編號,否則給一個新的編號,更新Blob存儲序列和矩形標記框架。運動目標跟蹤結果如圖2所示。
圖2(a)和圖2(b)實驗視頻是一段交通監控圖像,每一輛行駛通過的汽車被視為一個新的目標進行跟蹤,并標注序號。當多輛汽車同時駛過,就會同時被跟蹤,并且通過序號可以知道出現的先后順序,黃色標記矩形為運動目標提取傳遞參數。
當實驗視頻中出現噪音點,如圖2(c)所示,視頻中前景人物在花壇前面行走,背景中有路人走過(紅色方框內),樹葉也在隨風輕輕擺動,由于運動范圍不大,本文算法忽略不計,只對前景人物進行目標跟蹤,可見算法具有魯棒性。
1.3 運動目標自動提取
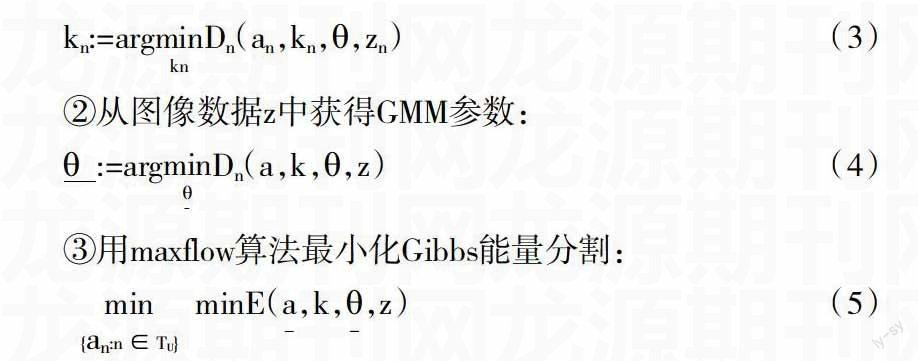
在GrabCut算法[3]的基礎上,提出運動目標自動提取算法。通過基于Kalman濾波器和Blob匹配法的運動目標跟蹤算法,視頻中的運動目標在每一幀視頻圖像上獲得標記的矩形框架rect=(x,y,w,h),矩形框架中心位置(x,y),寬和高為(w,h),即為運動目標自動提取算法的參數傳遞。有了矩形框架輸入,本文算法就可以用混合高斯模型初始化每個像素的初始值,然后執行最優化分割,算法流程如下:
①給視頻圖像上標記的矩形框架rect=(x,y,w,h)內的每一個像素點賦GMM初值:
④重復步驟①至③,直至收斂。
算法收斂后就可以得到運動目標的提取結果。多個運動目標提取結果如圖3所示,圖3(a)是對單個運動目標的提取,圖3(b)是對多個運動目標的提取。
2 結 語
本文針對靜止攝像機戶外視頻監控系統,提出一種新的運動目標自動檢測、跟蹤和提取方法。首先采用混合高斯模型背景差分法完成運動目標的粗檢測,然后將Blob匹配法和Kalman濾波器相結合共同完成運動目標跟蹤,最后采用GrabCut迭代算法實現最優化分割,檢測得到準確的運動目標輪廓。在室外和正常光照條件下,該方法具有良好的魯棒性和準確性。
參考文獻:
[1] Nazre B,Rama R,Detection and Inpainting of Facial Wrinkles using Texture Orientation Fields and Markov Random Field Modeling[J].IEEE Transactions on Image Processing,2014,(9).
[2] 陳遠,謝昭,吳克偉.面向部件遮擋補償的車輛檢測模型[J].中國圖象圖形學報,2014,(12).
[3] 周良芬,何建農.基于GrabCut改進的圖像分割算法[J].計算機應用,2013,(1).
[4] 劉偉峰,楊愛蘭.基于BIC準則和Gibbs采樣的有限混合模型無監督學習算法[J].電子學報,2011,(3A).
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
