海警艦艇智能旋梯系統
2015-05-30 21:27:07陳巍巍
科技創新與應用 2015年12期
關鍵詞:智能控制
摘 要:本項目基于C8051f020單片機,通過接收超聲波傳感器感應艦艇、旋梯到碼頭的距離變化的數據,設計了一套單片機利用智能感應算法處理數據,控制旋梯收放的智能控制系統。通過測試,本系統具備船到岸測距、智能收放旋梯、工作模式控制、自動報警、液晶顯示等五大功能。該系統方法可靠、結構合理、感應靈敏度高,且設計的聲光報警系統報警準確、及時。在海警艦艇、公務用船及其它民用船只上有很大的推廣應用價值。
關鍵詞:智能旋梯;智能感應;智能控制
1 智能感應算法
應用于本項目的智能感應算法,首先需要對旋梯的實際放置位置進行力學分析,得到旋梯的受力情況和電機牽引力作用函數,再通過實際測量數據,擬合收放時旋梯到岸的距離與牽引力作用時間的關系函數,最后再擬合牽引力作用時間與旋梯角度的關系函數。
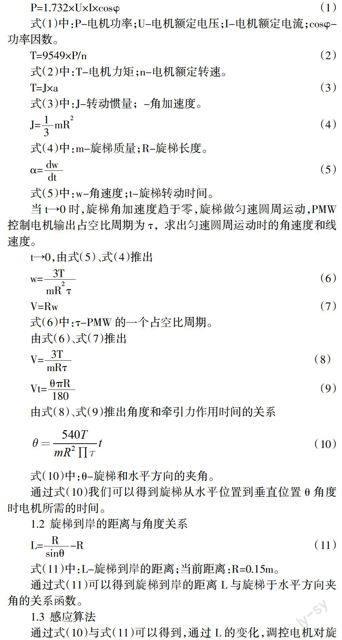
1.1 電機功率(牽引力)作用時間與角度關系
1.3 感應算法
2 硬件設計
2.1 單片機控制模塊
本系統采用C8051F020單片機,該單片機以其低功耗和高效能著稱。單片機模塊主要負責信號的接受、處理、分析,接受由超聲波模塊回傳的信號進行計算旋梯離岸的距離和船離岸的距離,接受工作模式、狀態的信號,并處理在各個模式和狀態下,通過PMW控制電機的轉動,進而控制旋梯的收放。
系統以單片機p0.0 p0.1為觸發10us的高電平信號輸出,p2.0 p2.1為超聲波回響信號輸入,p3.0口為聲光報警信號輸出,p2.4 p2.5,p2.6 p2.7為電機控制輸出,p0.2 p0.3為工作模式選擇輸入。
2.2 超聲波測距模塊
傳感器采用I/O口TRIG觸發測距給最少10us的高電平信號,模塊自動發送8個40kHz的方波,自動檢測是否有信號返回,有信號返回通過I/O口ECHO輸出高電平持續時間就是超聲波從發射到返回時間。
2.3 聲光報警模塊
當船到岸的距離超過靠岸的安全距離時,單片機處理超聲波模塊反饋的距離后,在p3.0口輸出高電平,實現報警功能,并且系統自動將工作模式轉換為手動模式。
2.4 旋梯手動/自動控制模塊
旋梯手動/自動控制模塊解決了人工智能控制中最關鍵的問題,即人工模式和智能模式如何在硬件電路的實現。在軟件設計中只需用設置一個變量的變換就可以實現,模式的切換。而硬件電路則需要保證在一個模式下另一個模式的變換不會影響這個模式的正常工作。當用戶選擇手動模式時,p2.4 p2.5輸出低電平,將自動模式鎖住,模塊只能通過開關S1、S2來控制旋梯的收放。用戶選擇自動模式時,開關處于斷開,將手動模式鎖住,模塊只能通過控制p2.4 p2.5輸出高低電平來控制旋梯的收放。旋梯手動/自動控制模塊在硬件上保證了兩種模式的獨立性,更好地實現旋梯的智能收放。模塊中接口K1、K2連接電機驅動模塊。
參考文獻
[1]林軍,陳翰林.數學建模教程[M].科學出版社.
[2]張賢明.MATLAB語言及應用案例[M].東南大學出版社.
[3]劉大海,李寧,晁陽.SPSS15.0統計分析從入門到精通[M].清華大學出版社.
[4]張培仁,孫立.基于C語言C8051F系列微控制器原理與應用[M].清華大學出版社.
[5]謝維成.單片機原理與應用及C51程序設計[M].清華大學出版社.
作者簡介:陳巍巍(1990-),男,浙江省溫州人,工作單位:公安海警學院,職務:學員,研究方向:計算機。
指導老師:梁春美。
猜你喜歡
卷宗(2016年10期)2017-01-21 15:33:38
科技創新與應用(2016年34期)2016-12-23 16:04:06
科技創新與應用(2016年34期)2016-12-23 09:52:55
電子技術與軟件工程(2016年20期)2016-12-21 11:36:49
電子技術與軟件工程(2016年20期)2016-12-21 11:00:56
計算機教育(2016年10期)2016-12-19 12:15:52
演藝科技(2016年10期)2016-11-26 22:11:21
科學與財富(2016年28期)2016-10-14 04:41:37
科技視界(2016年4期)2016-02-22 19:51:01