基于雙目立體視覺與數字散斑圖像相關的全場振動測量
2015-06-04 13:03:00陳教豆
振動與沖擊 2015年13期
陳 忠,陳教豆
(1.上海交通大學 機械系統與振動國家實驗室,上海 200240;2.華南理工大學 機械與汽車工程學院 廣東省精密裝備與制造技術重點實驗室,廣州 510641)
通過振動測試系統獲取機械設備的動態位移等系統動態特性的基本參數,是保證機械正常運行的重要工作。傳統的結構振動測試方法采用稀疏的“點”振動測試技術,如加速度傳感器振動測試技術、多普勒激光振動測試[1],其測試模型大小受到成本、技術的限制,不能滿足現代實驗模態測試對測試模型大小的要求。其它的全場光學振動測試方法,如散斑剪切變形[2](DSI)、電子散斑模式干涉[3](ESPI)和全息干涉[4],雖然具有良好的全場振動測試特性,但這些方法存在很難定量或測量精度不高、只能實現單軸的振動測量的問題。
數字散斑相關方法[5-6](DSCM)是根據物體表面隨機分布的散斑場在變形前后的統計相關性來確定物體的變形,該方法具有實時、非接觸、高精度、全景式測量、對被測物體干擾小等優點。傳統的二維數字散斑相關方法(2D-DSCM)只能測量平面物體的二維(面內)位移和應變。為了實現對物體的三維變形測量,Luo等[7]提出了基于雙目立體視覺原理和數字散斑相關方法相結合的三維數字散斑相關方法(3D-DSCM)。
針對二維數字散斑相關方法,潘兵等[8]研究了在不同散斑圖像中子區大小對測量精度的影響;Tong[9]從抗干擾能力和計算效率兩方面研究了各種相關函數的性能,推薦了歸一化協方差互相關函數;Schreier等[10-11]詳細研究了形函數和灰度插值方法的選擇對位移測量精度的影響,目前應用最多的是一階形函數,高次插值函數具有較高的精度但效率會降低。目前3D-DSCM用于獲取物體的三維動態位移與振動頻率研究方面,分析各種參數(相關函數、子區大小、形函數)對物體振動頻率的影響的相關文獻不多。
本文采用雙目高速攝像機連續采集散斑變形圖像,利用MatchID 3D[12]軟件得到圖像上散斑的離面位移,再由位移時程曲線求出頻率。通過與雙頻激光干涉儀測量的結果進行對比,驗證了三維數字散斑相關方法測量的可行性與可靠性:與雙頻激光干涉儀測量結果進行比對,考察了三維數字散斑相關方法測量離面位移的精度;分析了相關函數、子區大小、形函數的選擇對測量結果的影響。
13 D-DSCM原理
1.1 雙目立體視覺原理
雙目立體視覺系統類似于人的雙眼,用兩個攝像機記錄同一物體在不同方位下的圖像,然后通過匹配左右兩幅圖像中的對應點得到同一點的視差,再由標定得到的兩臺攝像機的內外參數得到物體表面的三維形狀信息[13]。圖1為雙目立體視覺模型。
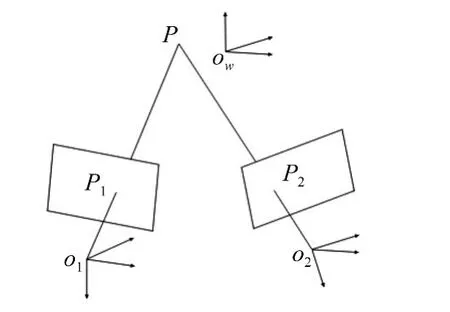
圖1 雙目立體視覺模型Fig.1 Stereo vision model
圖中 P(x,y,z)為物方世界坐標系 OW下一點,O1,O2分別為左右攝像機的光心。P點在左右攝像機中對應的像點分別為P1,P2。如果P1和P2的圖像坐標和由標定得到的左右攝像機的內、外參數,就可求得P點在世界坐標系下的三維坐標。
1.2 三維數字散斑相關方法
二維數字散斑相關方法通過相關運算來匹配兩幅散斑圖像(其中一幅圖像作為參考圖像,表示為f(x,y);另一幅作為待匹配圖像,表示為g(x,y))中的不同子區來得位移場。其基本原理如圖2所示,在參考圖像f(x,y)中選一個以 M(x0,y0)為中心的(2n+1)×(2n+1)大小的子區,利用子區中的灰度信息,通過一定的相關匹配算法,在待匹配圖像g(x,y)中找到以M'(x'0,y'0)為中心的目標圖像子區。
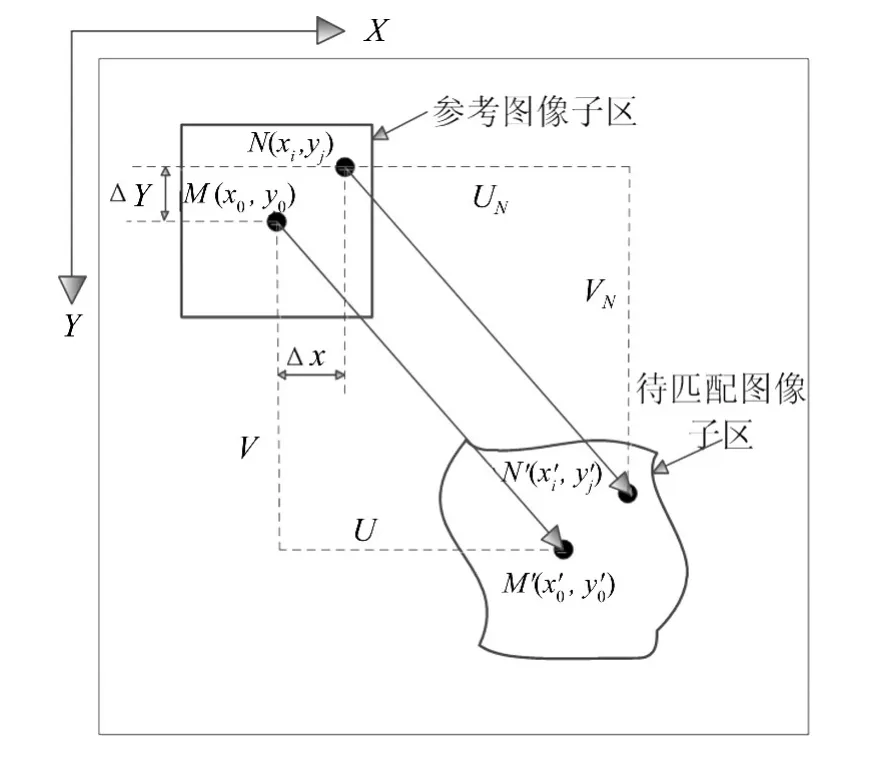
圖2 變形前后圖像子區示意圖Fig.2 Schematic diagram of sub-area image before and after deformation
三維數字散斑相關是由二維數字散斑相關方法與雙目立體視覺測量結合的一種三維光測力學測量方法。在三維數字散斑相關方法的測量技術中,有兩個關鍵性的技術環節:攝像機標定和匹配。
目前國內外相關研究人員最常用的兩種成熟的標定方法是:1986年Tsai[14]提出的經典的兩步標定法和1999年張正友提出的Zhang[15]標定法。在三維數字散斑相關方法的測量過程中匹配包含兩個環節:二維匹配(左圖像變形前、后圖像的匹配)和立體匹配(左右圖像的匹配),如圖3所示。而二維數字散斑相關中關于相關匹配的豐富研究結果可以應用到三維數字散斑相關中的立體匹配中。匹配完成后,對于同一時刻的左右圖像對應點,再利用標定得到的雙目攝像機內、外參數,根據三角測量原理可以得到目標點的三維坐標信息。
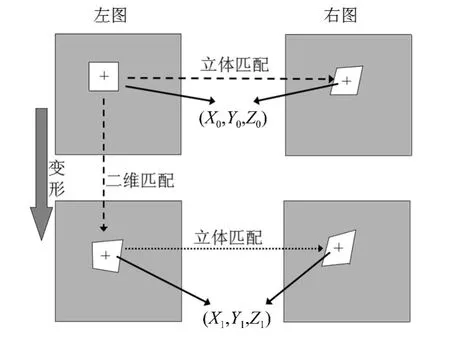
圖3 三維數字散斑相關方法匹配示意圖Fig.3 Schematic diagram of3d digital speckle correlation method matching
在進行相關匹配時,變形前后的圖像以及左右圖像需按照某一映射函數來進行相關計算。常用的映射函數有零階形函數、一階形函數、二階形函數等[16]。
零階形函數表達如下:
一階形函數表達如下:

二階形函數表達如下:

其中:Δx=xi- x0,Δy=yj- y0;u,v分別為子區中心點在x和y方向的位移分量;ux,uy,vx,vy為圖像子區的一階位移梯度;uxx,uyy,uxy,uxy,vxx,vxy,vyy為圖像的二階位移梯度。
評價變形前后圖像以及左右圖像子區的相似程度,常用的相關函數有歸一化互相關、零均值歸一化互相關、歸一化平方和以及零均值歸一化平方和[17],如表1所示。
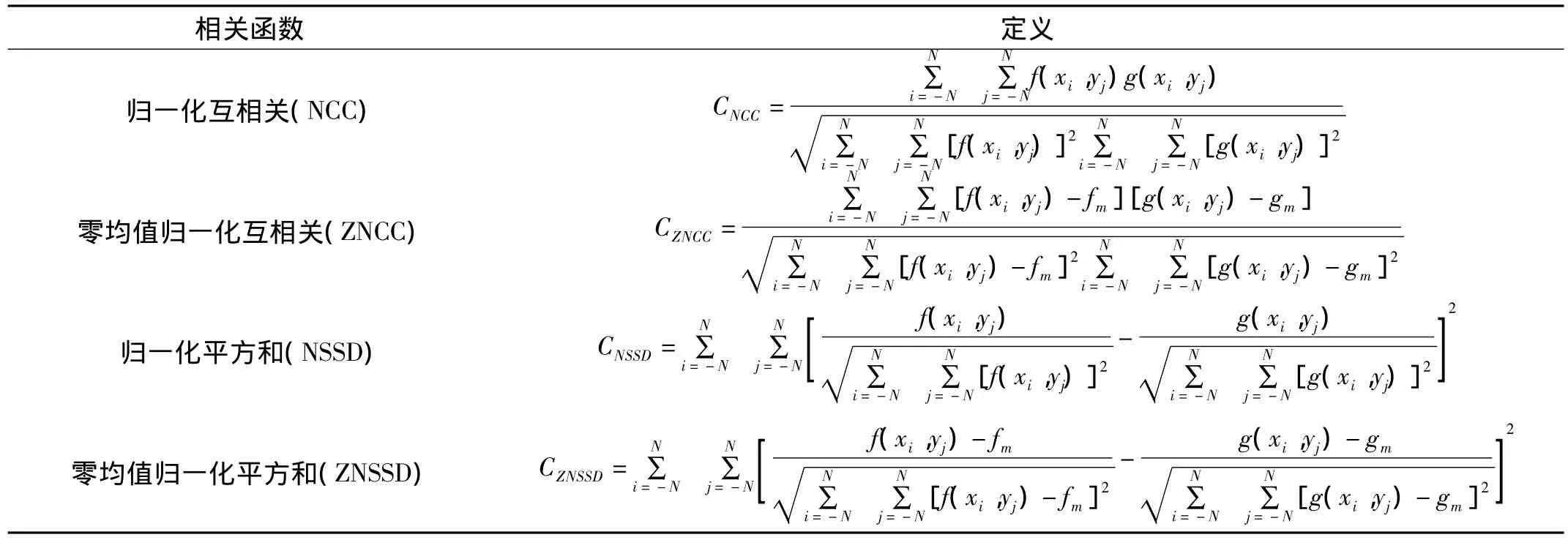
表1 相關函數Tab.1 Correlation Function
表1中,
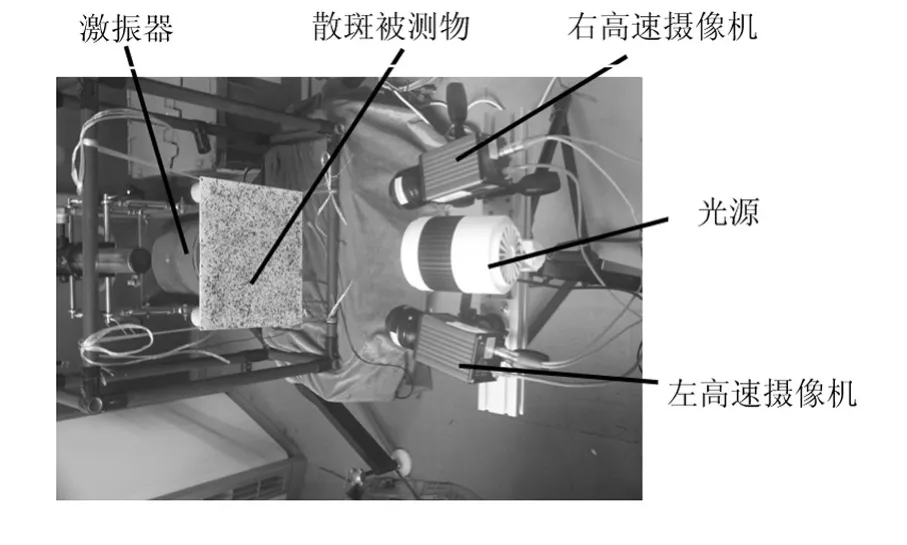
圖4 實驗系統Fig.4 Experimental setup
ZNCC和ZNSSD的抗噪聲干擾能力較強,同時對光強的線性變化不敏感。表1中的相關表達式可用Newton-Rapshon 方法進行優化求解[18]。
2 實驗系統與標定
2.1 實驗系統
本研究實驗系統如圖4所示,一塊300mm×300mm×2mm的鐵板懸掛在一框架上,鐵板正面噴有白底黑色散斑點,鐵板背后連接著一臺激振器,用兩臺CMOS型的AOS S-PRI F2高速攝像機記錄在激勵信號下鐵板表面不同時刻的散斑圖像。
2.2 攝像機標定
本文對雙目立體視覺系統的標定是采用HALCON機器視覺軟件。圖5為左右攝像機拍攝的兩幅標定板圖像。表2和表3為標定后獲得的攝像機的內、外參數。
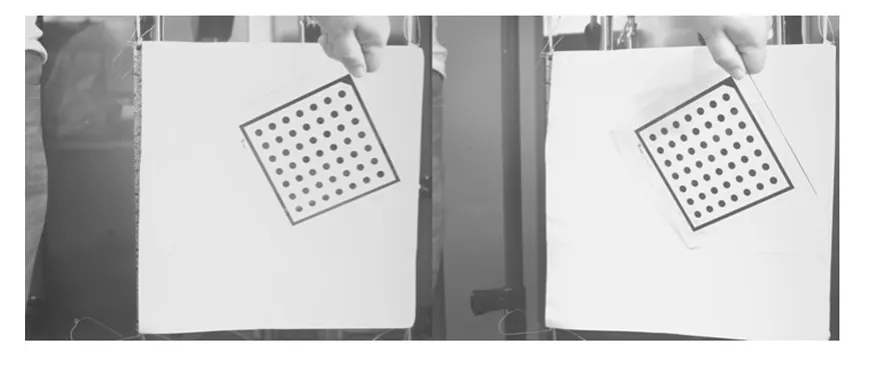
圖5 標定圖片Fig.5 Calibration template images

表3 左、右攝像機的相對位置參數Tab.3 Structural parameters of left and right camera
3 實驗及分析
先完成雙目視覺系統標定,得到雙目視覺系統的內、外參數。以正弦信號通過功放驅動電磁激振器激勵被測物體,并采用人工外部促發的方式發送TTL信號同步觸發兩臺高速攝像機,使兩臺高速攝像機同步采集散斑圖像。將所得圖像用MatchID 3D[15]軟件分析處理后,得到被測物分析區域各點在不同時刻的三維坐標,進一步得到分析點的離面位移信息。圖6中,小方框為感興趣區域,選取圓標注的點為分析點。圖7(a)為二維匹配結果圖,匹配系數在99%以上,圖7(b)為立體匹配結果圖,可得匹配系數在95%以上,匹配精度滿足測試要求。
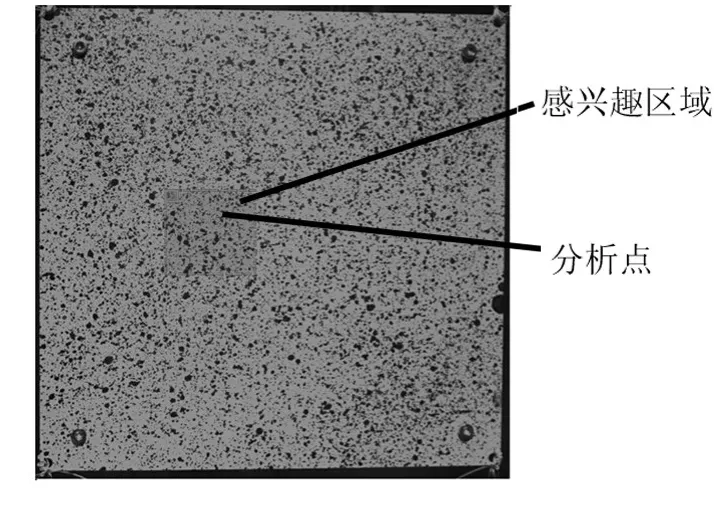
圖6 感興趣區域與分析點Fig.6 ROI and analyzed point
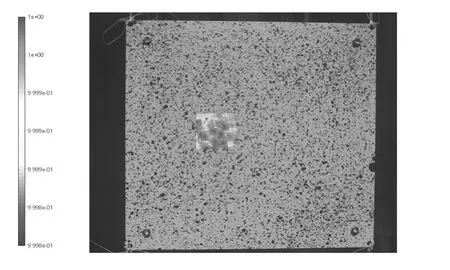
圖7 (a) 二維匹配結果Fig.7 (a)2D-Matching Result
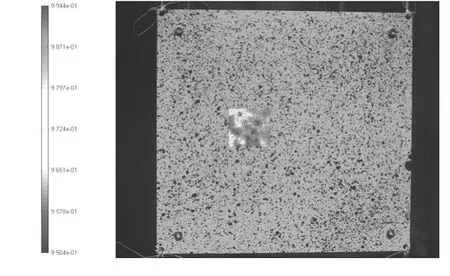
圖7 (b) 立體匹配結果Fig.7 (b)Stereo-Matching Result
影響三維數字散斑相關方法的位移測量精度的因素有多種。硬件方面有鏡頭畸變、散斑模式、攝像機夾角、光照等因素,算法方面涉及到相關函數、圖像子區形函數、子區大小、插值方法等。
為了更好地評價數字散斑相關方法的測量準確性與測量精度,本文將由數字散斑相關方法測得的結果與測量精度更高的雙頻激光干涉儀(RENISHAW XL-80)測得的數據進行比較。
3.1 測量精度的對比分析
采用3D-DSCM和雙頻激光干涉儀兩種方法在正弦波激勵下對實驗模型測試點進行測量,得到的對比曲線如圖8(a)和8(b)所示。
計算測試時間歷程信號的有效值,得到激光干涉儀測試數據的有效值I0=0.85977mm,數字散斑法方法測試數據的有效值為I'=0.88678mm。計算相對誤差如下:

進一步對幅頻曲線做相關分析,得到相關系數corr=0.999058。
可以看出,由雙頻激光干涉儀和三維數字散斑相關方法得到的位移時程曲線和幅頻曲線吻合得很好。
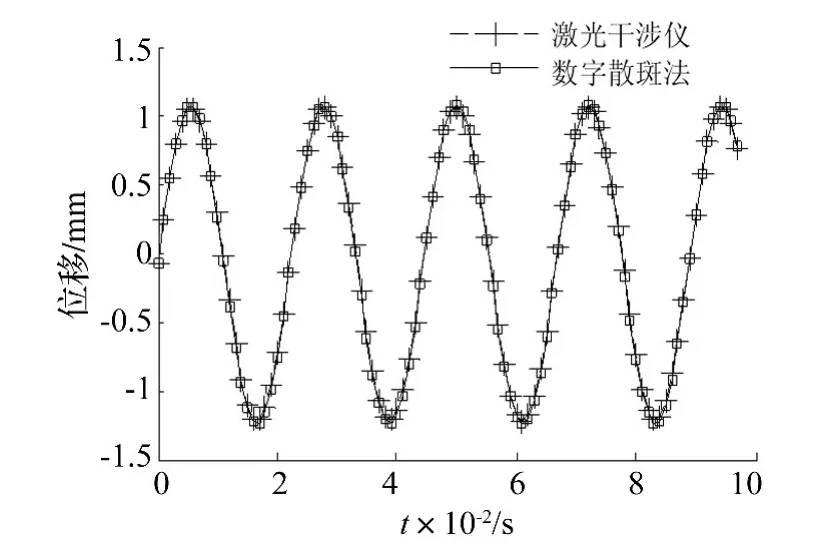
圖8 (a) 位移時程曲線Fig.8 (a)The displacement signals in time domain
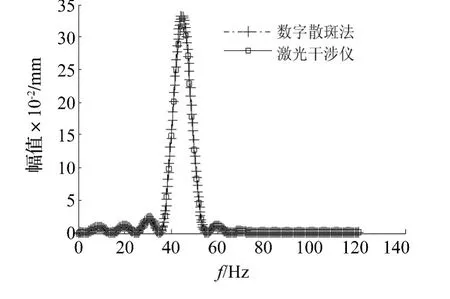
圖8 (b) 幅頻響應曲線Fig.8 (b)The amplitude-frequency response curves
3.2 對比不同相關函數
采用不同的相關函數(子區大小為21×21)得到的位移時程曲線和幅頻曲線如圖9(a)、9(b)所示。
將測量得到的數據有效值、幅頻曲線與激光干涉儀測得的數據進行比較分析,得到相對誤差與相關系數如圖10所示。
從圖10中可以得到,對于不同的相關函數來說,NSSD和NCC的計算精度較高,ZNSSD和ZNCC的計算精度較低。
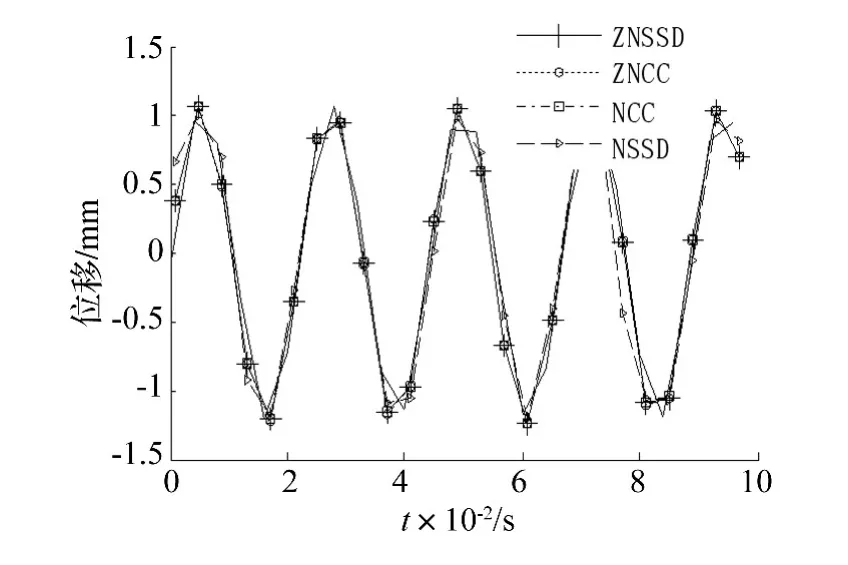
圖9 (a) 位移時程曲線Fig.9 (a)The displacement signals in time domain
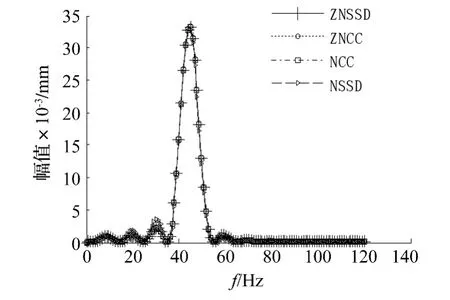
圖9 (b) 幅頻響應曲線Fig.9 (b)The amplitude-frequency response curves
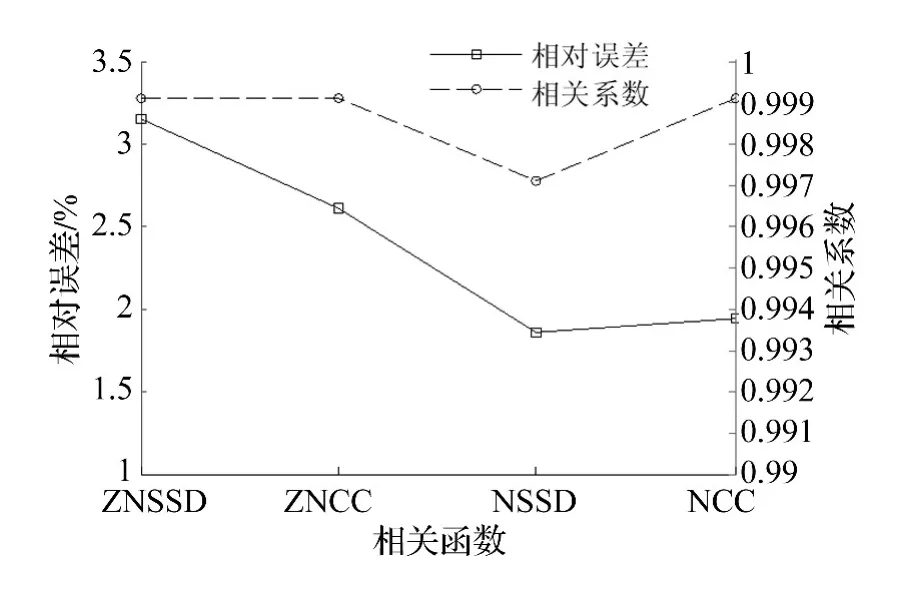
圖10 相關函數對測量結果的影響Fig.10 The effects on measuring results owing to correlation functions
為了研究不同子區大小對測量結果的影響,在其它條件一致的情況下選擇不同的子區大小來計算圖像感興趣區域中分析點的離面位移并進行傅里葉變換得到幅頻曲線,將測量得到的位移數據有效值、幅頻曲線與激光干涉儀測得的數據進行比較分析。在本文中,由于被測物體表面的散斑點較稀疏,在采用5×5~15×15的子區大小時,無法實現很好的匹配效果,故本文選定的子區大小為21×21~91×91,得到相對誤差與相關系數如圖11所示。圖12表示不同子區大小時的匹配耗時。
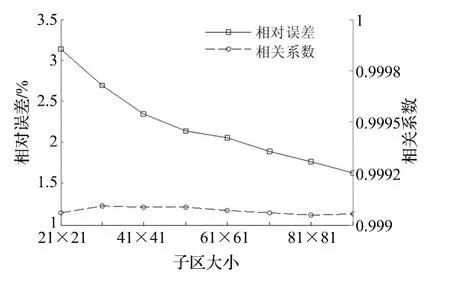
圖11 子區大小對測量結果的影響Fig.11 The effects on the measuring results owing to subset size
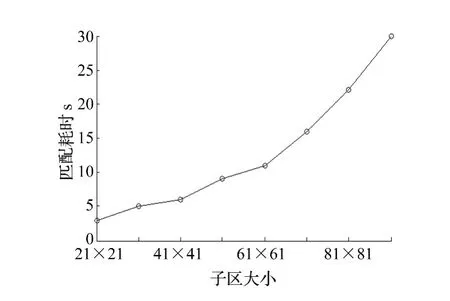
圖12 匹配耗時Fig.12 Time-consuming of Matching
從圖11、12可以得到,隨著子區的變大,相應的相關系數都很高且變化很小,計算精度提高,相應的匹配耗時逐漸增加。
3.4 對比形函數
在選擇ZNSSD相關函數、41×41大小子區條件下,考慮不同形函數選擇下計算目標點的位移與幅頻曲線,將測量得到的位移數據有效值、幅頻曲線與激光干涉儀測得的數據進行比較分析,得到相對誤差與相關系數如圖13所示。
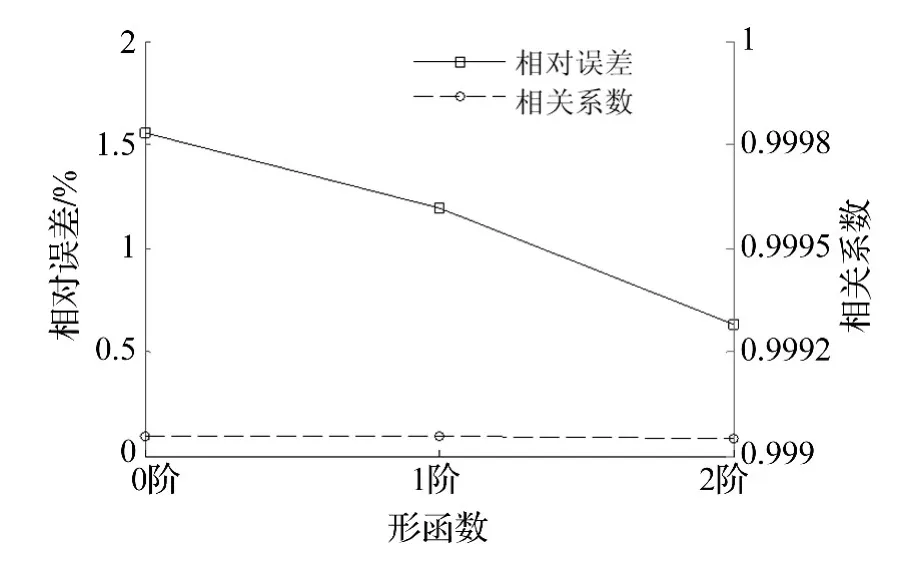
圖13 形函數對測量結果的影響Fig.13 The measuring effects of shape function
從圖13可以得到,隨著形函數階次的提高,相應的計算精度也隨之提高,相關系數無多大變化。
4 結論
本文基于雙目視覺原理的3D-DSCM方法實現對正弦激勵下的物體的全場振動信息測量,將測量結果與雙頻激光干涉儀測得的數據進行對比分析,證明了進行全場振動測量的可行性。由實驗結果可知,相關函數、子區大小、形函數的選擇都對計算的精度具有很大的影響。結果可以歸納為:
(1)隨著子區大小的增加,位移的計算精度越高,但相應的耗時也會增加,一般計算子區可折中取41×41~61×61;
(2)對于不是很復雜的變形,宜采用NSSD和NCC相關函數,形函數選用一階就能滿足要求。
[1]紀躍波,白永明,黃衛清,等.基于單側點單方向多普勒激光測頭面內振動測試方法[J].振動工程學報,2007,20(3):232-237.JI Yue-bo,BAI Yong-ming,HUANG Wei-qing,et al.Test the in-plane vibration-mode with one-dimensional Doppler laser speed detector for single test-point[J].Journal of Vibration Engineering,2007,20(3):232 -237.
[2]顧國慶,王開福.物體變形測量的相移數字散斑剪切干涉術[J].激光雜志,2011,32(4):16-17.GU Guo-qing, WANG Kai-fu. Digital phase-shifting shearography for measurement of object deformation [J].Laser Journal,2011,32(4):16 -17.
[3]景超,井文才,徐天華,等.用于測振的電子散斑剪切干涉術[J].納米技術與精密工程,2006,1(4):58-62.JING Chao,JING Wen-cai,XU Tian-hua,et al.Electronic speckle-shering patten interferometry for vibration analysis[J].Nanotechnology and Precision Engineering,2006,1(4):58-62.
[4]周燦林,亢一瀾.數字全息干涉法用于變形測量[J].光子學報,2004,33(2):171-173.ZHOU Can-lin,HANG Yi-lan.Deformation measurement by digital holofraphy[J].Acta Photonica Sinica,2004,33(2):171-173.
[5]Pan Bing,Xie Hui-min,Guo Zhi-qing,et al.Full-field strain measurement using two-dimensional savitzky-Golay digital differentiator in digital image [J]. Opt. Eng,2007(3):033601.
[6]Sutton M A,McNeill S R,Helm J D,etal.Advances in twodimensional and three-dimensional computer vision[J].Topics in Applied Physics,Springer Verlag,2000,77:323-372.
[7]Luo P F,Chao Y J,Sutton M A,et al .Accurate measurement of three dimensional displacement in deformable bodies using computer vision[J].Experimental Mechanics,1993,33(2):123-132.
[8]Pan B,Xie H M,Wang Z Y,et al.Study on subset size selection in digital image correlation for speckle patterns[J].Opt,2008,16:37 -48.
[9]Tong W .An evaluation of digital image correlation criteria forstrain mapping applications[J].Strain 2005,41:167-75.
[10]Schreier H W,Sutton M A .Systematic errors in digital image correlation due to undermatched subset shape functions Exp[J].Mech,2002,42:303 -10.
[11]Schreier H W,Braasch J R,Sutton M A.Systematic errors in digital image correlation caused by intensity interpolation[J].Opt.Eng,1999,39:15 -21.
[12]Dimitri Debruyne.MatchID 3D[CP/DK].http://www.matchid.org.2013.12.12/2014.06.22.
[13]Zhang S.Handbook of 3D machine vision:optical metrology and imaging[M].Boca Raton FL:CRC Press.2013.
[14]Tsai R Y.A versatile camera Calibration technique for highaccuracy 3D machine vision methrology using off-the-self TV cameras and lenses[J].IEEE Journal of Robotics and Automation,1987,ra-3(4):323 -344.
[15]Zhang Z Y.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Itelligence.2000,22(11):1330-1334.
[16]Garcia D,Orteu J J,Penazzi L.A combined temporal tracking and stereo correlation technique for accurate measurement of 3D displacements:application to sheet metal forming[J].Journal of Materials Processing Technology,2002,125:736-742.
[17]Pan B,Qian K,Xie H,et al.Two-dimensional digital image correlation for in-plane displacement and strain measurement:A review[J].Measurement Science and Technology,2009,20:062001.
[18]潘兵,謝惠民.數字圖像相關中基于位移場局部最小二乘擬合的全場應變測量[J].光學學報,2007,27(11):1980-1986.PAN Bing,XIE Hui-min.Full-field st rain measurement based on local least2square fit ting for digital imagecorrelation met hod[J].Acta Optica Sinica,2007,27(11):1980-1986.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56