智能微位移主動隔振控制系統的研究
2015-06-04 13:03:20王常松韋利明
振動與沖擊 2015年13期
王常松,梁 森,韋利明
(1.青島理工大學 機械工程學院,山東 青島 266033;2.中國工程物理研究院,四川 綿陽 621900)
目前隨著微納米制造技術的飛速發展,精密儀器和微納米設備的應用越來越廣泛[1-3],科學研究和工業實際生產中的工件尺寸不斷地向微細加工領域延伸,由毫米級、微米級逐漸發展到現在的納米級工藝,對微小工件的加工和檢測必須在隔振性能良好的平臺中進行,否則任何微弱的振動,如人說話走動以及其它設備和地基所引起的振動都會對其加工和測試結果產生很大的影響,這些微弱振動會使微納米領域研究人員的成果付之一炬,因此解決微納米加工設備的隔振問題對加工系統及其制作工件的精度就顯得十分重要,也是精密儀器和微納米設備必須解決的關鍵難題。目前,常用振動隔離的控制方法主要是被動隔振結構[4-8],即在振動結構表面粘貼或在其內部嵌入粘彈性材料,使阻尼材料在變形中消耗更多結構振動能量達到振動控制之目的。這些方法的優點是減振系統的可靠性較高、穩定性好,但系統一旦制作完成,很難改變其隔振特性,且對精密儀器和微納米設備的隔振效果不佳。雖然主動隔振是目前的一個熱點,現有的關于主動隔振文獻中多數只進行仿真而沒有相關試驗[9-13]。
本文充分利用壓電陶瓷材料(PZT)的逆壓電效應,設計了一種層疊式壓電作動器,發展了一個由作動器、傳感器和控制器組成的智能微位移主動隔振控制系統,探討利用F-XLMS自適應控制理論以完成對整個系統性能的預測和控制,將有源噪聲控制技術的相關原理應用到振動的主動控制中,為精密儀器、微納米設備主動隔振系統設計奠定基礎。
1 微位移主動隔振系統層疊式壓電作動器
本文作動器采用層疊式結構,即將多片壓電材料堆疊放置,如圖1所示,通過片間布置的電極給每一片壓電材料施加相同的控制電壓,這樣各層壓電材料在電學上并聯、力學上串聯,若忽略電極材料的本身影響,作動器厚度總變形等于各層變形量之和。
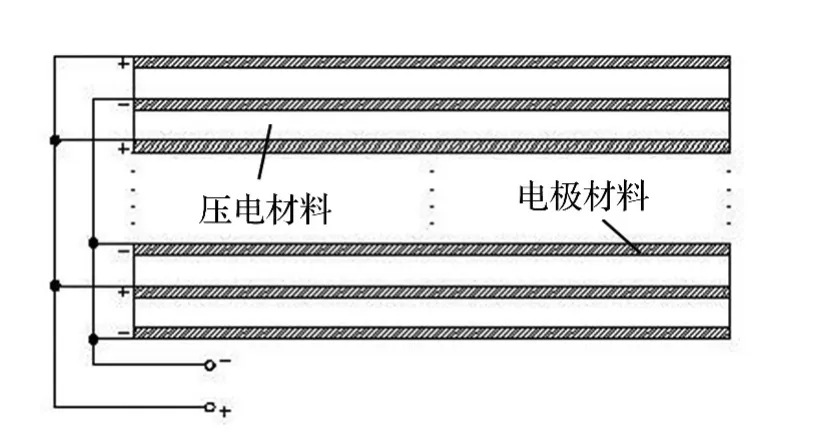
圖1 層疊式壓電陶瓷作動器示意圖Fig.1 The multilayer piezoelectric ceramic actuator
由壓電方程[14-15]可以推得這種層疊式壓電作動器位移輸出表達式:

其中:Δt為壓電作動器輸出位移,n為作動器壓電材料層數,d33為壓電應變常數,U為控制電壓。
2 微位移主動隔振系統及控制算法的開發
2.1 微位移主動隔振系統
本文提出的新型智能微位移主動隔振控制系統由壓電作動器、控制器、參考傳感器、誤差傳感器、振動結構基體、被控結構以及激振器等幾部分組成,其系統工作原理示意圖如圖2所示。

圖2 微位移主動隔振控制系統Fig.2 The micro-displacement active vibration isolation control system
在圖2中,p(n)為激振器初級振動信號,s(n)為壓電作動器次級振動信號,x(n)為基體振動信號,y(n)為控制電壓信號,d(n)為期望振動信號,e(n)為受控后誤差振動信號。
該主動隔振控制系統的工作過程是這樣的:激振器發出初級振動信號p(n),激勵振動結構基體產生振動信號x(n),同時在參考傳感器處產生期望振動信號d(n),當然本文控制系統中x(n)和d(n)近似相同,參考傳感器拾取振動信號x(n)作為控制器的輸入信號,控制器按照控制算法計算出控制電壓信號y(n),經驅動電源放大后施加于壓電作動器,使壓電作動器產生與x(n)反向的次級振動信號s(n),在誤差傳感器處疊加后產生誤差信號e(n),反饋給控制系統,然后控制器修正控制算法參數,重新計算控制電壓信號y(n)并輸出。這樣不斷重復上述過程,循環計算,直到尋找到最優控制參數,消除誤差信號e(n)到設定值為止。
2.2 自適應濾波器與濾波-XLMS自適應控制算法
自適應濾波器通常是一個由參數可調抽頭延遲器組成的橫向濾波器[12],如圖3所示。
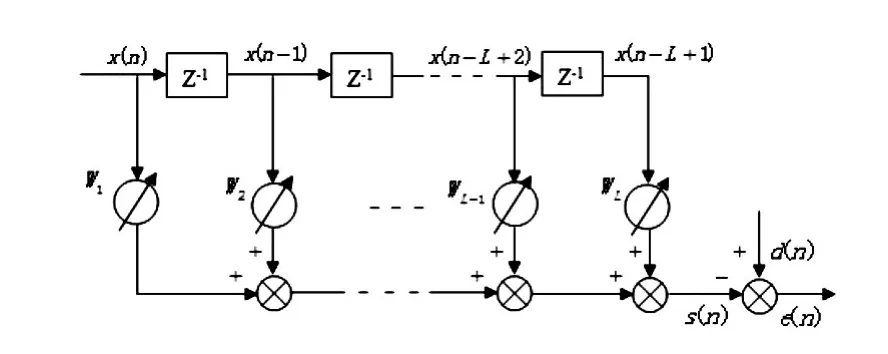
圖3 自適應濾波器結構原理圖Fig.3 The principle diagram of adaptive filters
圖3中:x(n)為輸入信號,d(n)為期望信號,e(n)為誤差信號,W(n)為可調權系數,s(n)為輸出信號,L為自適應濾波器的階數。
根據有源消聲理論[12,16],本文微位移主動隔振系統采用一種濾波-XLMS(F-XLMS)[11,15]自適應控制算法,以最小均方自適應濾波算法(LMS)[11]為基礎,加入了初級通道、次級通道和參考通道,該算法結構原理如圖4所示。
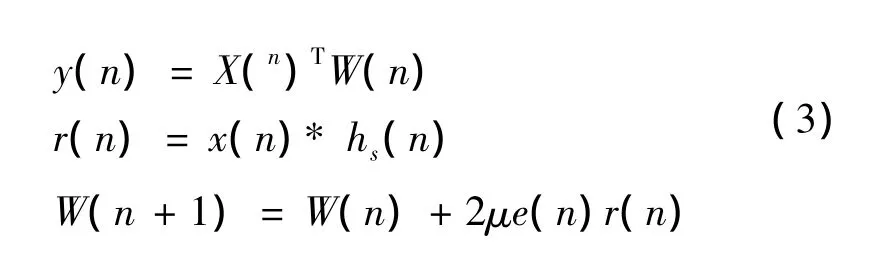
圖4中,初級振源(激振器)到誤差傳感器之間為初級通道,該通道離散域傳遞函數為Hp(z);初級振源到參考傳感器之間為參考通道,該通道離散域傳遞函數為Hr(z);作動器次級振源到誤差傳感器之間為次級通道,該通道離散域傳遞函數為Hs(z)。由參考文獻[11],F-XLMS算法最終計算表達式為:
2.3 微位移主動隔振控制系統程序開發
本文微位移主動隔振控制系統軟件開發采用NI LabVIEW及其應用工具包編寫,控制系統程序主要分為6個部分。
① 數據采集與記錄部分:配置NI數據采集板卡通道,設置采樣率、采樣時鐘等,并使用NI TDMS文件格式保存實驗數據;② 加速度信號頻域積分部分:實現加速度信號轉變為位移信號,用于激振器初級振動位移信號的測量;③ 主動隔振控制算法部分:根據傳感器采集到的振動量數據計算當前壓電作動器所需施加的控制電壓;④ 作動器標定與過載保護部分:主要有兩個功能,一是實現壓電作動器位移和控制電壓的標定,二是防止控制電壓過大而損壞作動器或燒毀數據采集板卡;⑤ Microsoft Word報表生成部分:用于自動生成和打印實驗數據報告;⑥ 振動信號離線頻譜分析程序:繪制傳感器測得初級振動信號和次級振動信號的位移頻譜圖。
先分別開發出以上6個部分程序,再將這些程序融合封裝為微位移主動隔振控制系統總程序,并設計用戶操作界面,如圖5所示。
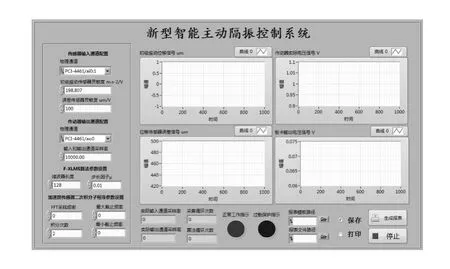
圖5 微位移主動隔振控制系統程序用戶操作界面Fig.5 The user operation interface of this new smart micro-displacement active vibration isolation system
3 微位移主動隔振控制系統硬件平臺搭建
按照實現功能,可以將微位移主動隔振控制系統硬件平臺劃分為3個部分:激振器初級振源部分、作動器次級振源部分、以及傳感檢測、數據采集與顯示部分。
3.1 激振器初級振源部分
激振器初級振源部分的作用是激勵基體產生不同頻率和幅值的振動位移,為控制系統提供初級振動信號。主要由 BK-4808激振器、BK-2719功率放大器、BK-3560B數據采集器、DELL筆記本電腦以及BK Labshop軟件等組成,如圖6所示。
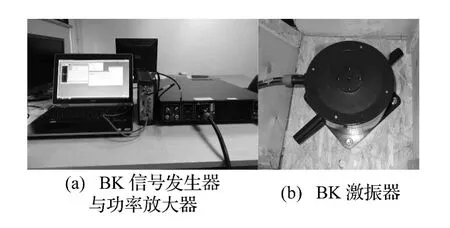
圖6 激振器初級振源部分Fig.6 The primary vibration source part
3.2 作動器次級振源部分
作動器次級振源部分的功能是產生與基體初級振動信號反相的次級振動信號,以抵消初級振動位移,達到主動隔振之目的。主要由壓電陶瓷作動器和驅動電源組成,如圖7所示。
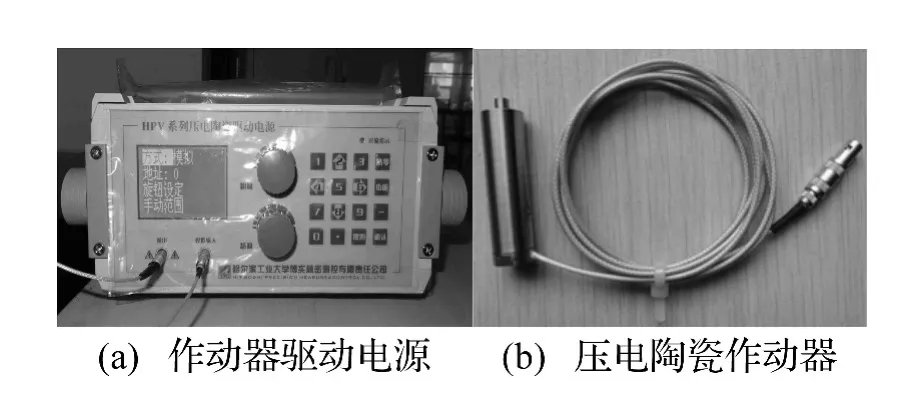
圖7 作動器次級振源部分Fig.7 The actuator secondary vibration source part
3.3 傳感檢測、數據采集與顯示部分
傳感檢測部分包含初級振動信號傳感器和誤差信號傳感器,分別用于采集振動基體的初級振動位移信號和受控后的殘余振動位移信號,為控制算法軟件提供初始數據;數據采集與顯示部分的主要功能是讀取振動模擬信號并轉換為數字信號,同時將控制算法軟件計算出的控制電壓轉換為模擬信號并發出。主要由BK4524-B-004加速度傳感器、電渦流位移傳感器、NI PXI數據采集系統(NI PXI-4461動態數據采集板卡、NI PXIe-8108嵌入式控制器、NI PXIe-1062Q機箱)等組成,如圖8所示。
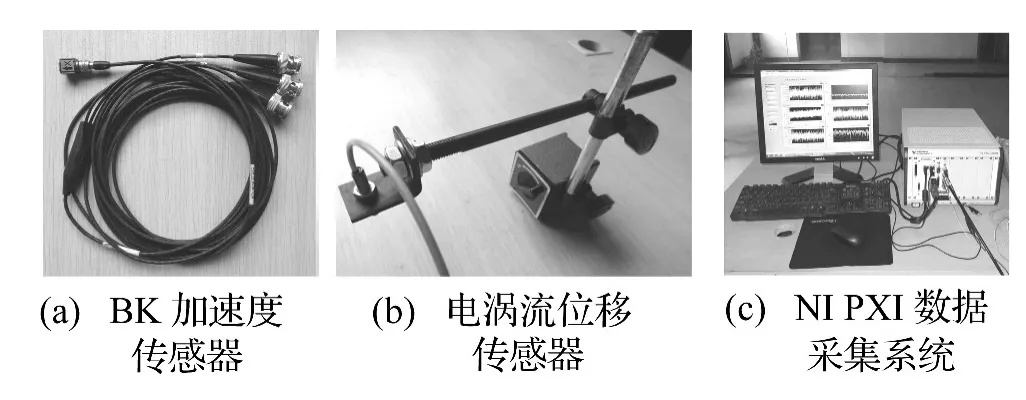
圖8 傳感檢測、數據采集與顯示Fig.8 The sensing detection,data acquisition and display part
3.4 總體硬件平臺搭建
連接以上3部分儀器,組成微位移主動隔振系統總體硬件實驗平臺,如圖9所示。

圖9 微位移主動隔振系統總體硬件實驗平臺Fig.9 The hardware experiment platform of micro-displacement active vibration isolation control system
4 微位移主動隔振控制系統實驗研究
本節使用F-XLMS控制算法進行微位移主動隔振實驗研究,激振器采用80 Hz正弦信號、60~180 Hz掃頻信號(頻率增長率120 Hz/s)、60~260 Hz隨機信號等三種典型振動激勵信號。數據采集系統2個輸入通道和1個輸出通道同步采集,每通道采樣率設為2000 S/s,F-XLMS控制算法步長因子取0.002,自適應濾波器階數取64,電壓初始值設定為66.6 V,測得振動位移信號數據以NI TDMS格式記錄。三種振動信號激勵下的各項實驗數據分別如圖10、圖11和圖12所示。
當振動激勵信號為80 Hz單頻正弦信號時,如圖10(a)和(c)所示,受控后振動位移曲線在0.1 s前迅速衰減,在0.1 s后趨于平緩逐漸達到穩定狀態,但穩定后振動位移仍在小范圍內波動,振動位移衰減至1μm范圍所用時間0.1 s;由圖10(d)頻譜圖可知,受控前正弦振動位移信號為-37 dB,受控后衰減為-100 dB,振動位移下降了63 dB。
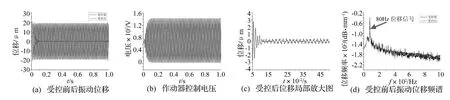
圖10 正弦振動激勵控制前后實驗數據Fig.10 The experiment results before and after control under 80Hz sine vibration excitation signal
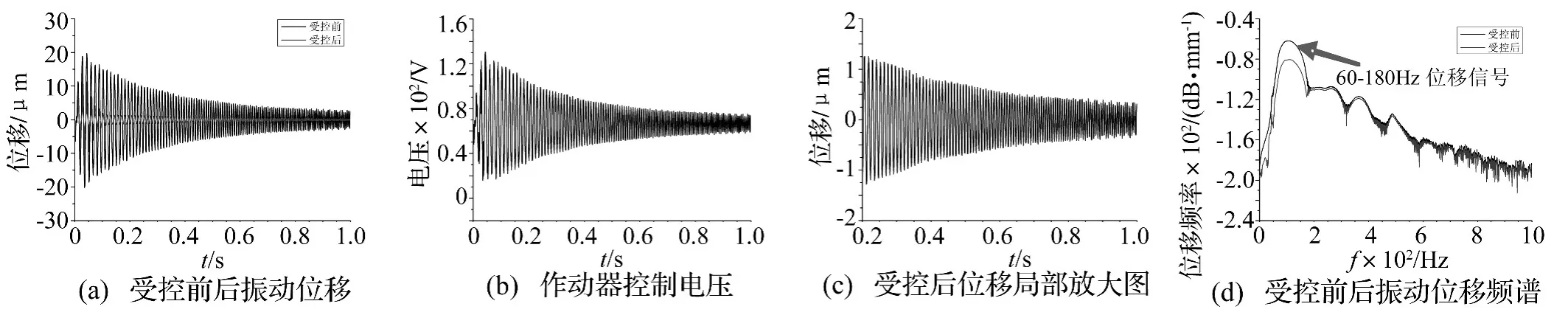
圖11 掃頻振動激勵控制前后實驗數據Fig.11 The experiment results with and without control under 60 -180Hz sweep frequency excitation signal
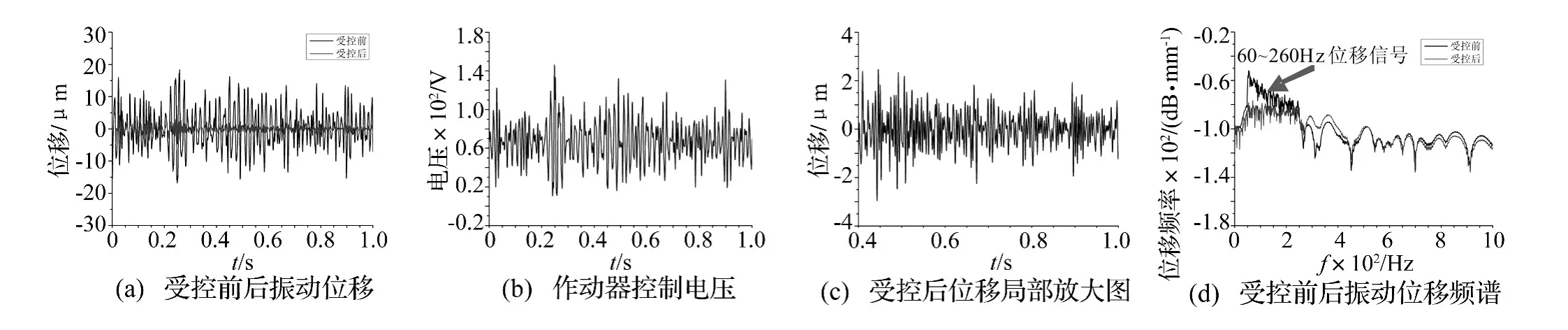
圖12 隨機振動激勵控制前后實驗數據Fig.12 The experiment results before and after control under 60-260Hz random vibration excitation signal
當激勵信號為60~180 Hz掃頻振動信號時,由于激振器恒加速度掃頻振動,導致受控前振動位移隨著頻率的增大而逐漸降低,如圖11(a)和(c)所示,受控前振動位移隨著時間的推移頻率增大、幅值降低,受控后振動位移曲線始終處于衰減狀態,振動位移衰減至1 μm范圍所用時間0.35 s;由圖11(d)頻譜圖可知,受控前振動位移信號最高峰處為-60 dB,受控后衰減為-81 dB,振動位移下降了21 dB。
當激勵信號為60~260 Hz隨機振動信號時,如圖12(a)和(c)所示,受控后振動位移曲線始終處于變化狀態,沒能衰減至1μm范圍以下;由圖12(d)頻譜圖可知,受控后位移降低較為明顯,在頻譜最高峰處下降了約30 dB。
綜合比較以上各實驗數據時域圖,微位移主動隔振系統相同的控制算法參數對上述三種振動激勵信號的隔振效果相差不大,只不過是衰減時間的長短有所差別,簡單的單頻信號衰減時間就短,復雜信號相應的衰減時間就稍長一點,究其原因主要在于相同步長因子條件下,對復雜度不同的信號,F-XLMS算法獲得最佳權系數W0所需的迭代次數不同,每一次計算步所需的權系數W(n)來源于上一次計算步,當信號較為復雜時,獲得最佳權系數W(n)所需的時間就會稍長一些,這樣就導致隨機振動激勵信號的衰減時間比正弦振動激勵的衰減時間長。不管振動衰減過程如何變化,一旦形成收斂的隔振效果,控制結果就基本保持不變。
對于F-XLMS控制算法,不論何種振動激勵信號,受控后的振動位移曲線始終不能衰減為零,以橫軸為中心在小范圍內波動,其主要原因有:① 當F-XLMS控制算法達到穩定狀態時,權系數并不能精確地等于最佳權系數W0,而是在最佳權系數W0附近上下波動,這樣輸出控制電壓就會存在一定波動,必然導致受控后振動曲線小范圍內波動現象;② 壓電陶瓷材料的遲滯現象會使作動器不能完全地復現算法輸出信號y(n),導致次級振動信號本身就存在一定的波紋,同樣激振器發出的初級振動信號也可能會存在波紋,這樣就會使受控后振動信號存在上述波動現象;③ 數據采集系統和傳感器電路背景噪聲、傳感器測量及加速度積分誤差、驅動電源輸出電壓誤差、儀器線路磁場、實驗室供電電壓波動等也會對采集到的位移振動信號曲線帶來一定的干擾;④ 地基和工作臺的振動雖然很弱,但也可能會影響所采集到的位移振動信號。
5 結論
本文針對精密設備的微位移隔振問題,設計了一種以壓電陶瓷為作動器的新型智能微位移主動隔振控制系統,使用LabVIEW軟件環境開發了控制系統數據采集和F-XLMS控制算法程序,以NI PXI數據采集系統和BK激振器為基礎,搭建了微位移主動隔振控制系統的硬件實驗平臺,通過實驗分別獲得了正弦、掃頻和隨機激勵信號下受控前和受控后的振動位移曲線,結果表明三種激勵信號受控后的振動位移大幅度降低,驗證了該系統對微位移主動隔振的有效性,為精密儀器、微納米設備的微位移智能主動隔振奠定基礎。
最后,感謝美國國家儀器公司劉力帆工程師等對本文實驗的支持,正是因為他們提供的NI PXI數據采集系統,本文實驗才能得以圓滿完成。
[1]崔錚.微納米加工技術及其應用綜述[J].物理,2006,36(1):34-39.CUI Zheng.Overview of micro/nanofabrication technologies and applications[J].Physics,2006,36(1):34 -39.
[2]Wang Q M,Yang Y E,Su M B,et al.Research on application of micro-nano acceleration sensor in monitoring the vibration state of vehicles[J].Procedia Engineering,2012,29:1213 -1217.
[3]楊玥,鄭素霞,許忠斌.微納米技術在工業裝備中的應用研究進展[J].輕工機械,2011,9(4):117 -120.YANG Yue,ZHENG Su-xia,XU Zhong-bin.Application development of the micro-and Nano-technology in industrial equipment[J].Light Industry Machinery,2011,9(4):117-120.
[4]Granger D,Ross A.Effects of partial constrained viscoelastic layer damping parameters on the initial transient response of impacted cantilever beams:Experimental and numerical results[J].Journal of Sound and Vibration,2009,321(1):45-64.
[5]梁森,梁磊,米鵬.嵌入式共固化復合材料阻尼結構的新進展[J].應用力學學報,2010,27(4):767 -772.LIANG Sen,LIANG Lei,MI Peng.New development of the embedded and co-cured composite damping structures[J].Chinese Journal of Applied Mechanics,2010,27(4):767 -772.
[6]王輝,梁森,王常松.嵌入式共固化穿孔阻尼層復合材料結構動力學性能研究[J].復合材料學報,2014,31(1):185-191.WANG Hui,LIANG Sen,WANG Chang-song.Dynamic property analysis of the embedded co-cured perforated damping layer composite structure[J].Acta Materiae Compositae Sinica,2014,31(1):185-191.
[7]梁森,王常松.振動板梁結構的發電及被動控制系統[P].專利號:ZL201320305980.7.
[8]李強,徐登峰,范新,等.新型永磁隔振器的隔振性能分析與實驗研究[J].振動與沖擊,2013,32(13):6 -12.LI Qiang,XU Deng-feng,FAN Xin,et al.Analysis and test of vibration isolation performance for a novel permanent magnet vibration isolator[J].Journal of Vibration and Shock,2013,32(13):6 -12.
[9]李雨時,周軍,鐘鳴,等.基于壓電堆與橡膠的主被動一體化隔振器研究[J].振動、測試與診斷,2013,33(4):571-577.LI Yu-shi,ZHOU Jun,ZHONG Ming,et al. Active and passive integration of vibration isolator based on piezoelectricrubber[J].Journal of Vibration,Measurement & Diagnosis,2013,33(4):571 -577.
[10]李斌,董萬元,王小兵.一種氣動/電磁聯合作動的主動隔振器設計與仿真[J].西北工業大學學報,2013,31(6):871-877.LI Bin,DONG Wan-yuan,WANG Xiao-bin.Design and simulation of an active vibration isolator based on pneumatic electromagnetic hybrid driving[J].Journal of Northwestern Polytechnical University,2013,31(6):871 -877.
[11]徐永成,溫熙森,陳循,等.有源消聲技術與應用述評[J].國防科技大學學報,2001,23(2):119 -124.XU Yong-cheng,WEN Xi-sen,CHEN Xun,et al.An overview on active noise control technology and application[J].Journal of National University of Defense Technology,2001,23(2):119 -124.
[12]陳克安.有源噪聲控制[M].北京:國防工業出版社,2005.
[13]Chen T R,Hwang F H,Hsu H W,et al.Adaptive active noise control system for secondary path fluctuation problem[J].International Journal of Innovative Computing,Information and Control,2012,8(2):967 -976.
[14]王矜奉,蘇文斌,王春明,等.壓電振動理論與應用[M].北京:科學出版社,2011.
[15]張福學,王麗坤.現代壓電學上冊[M].北京:科學出版社,2001.
[16]Sahib M A,Kamil R,Marhaban M H.Nonlinear FXLMS algorithm for active noise control systems with saturation nonlinearity[J].IEEJ Trans Elec Electron Eng,2012.
[17]陳樹學,劉萱.LabVIEW寶典[M].北京:電子工業出版社,2011.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55