電傳動履帶車輛傳動系統方案研究
2015-06-12 12:35:07賈小平于魁龍樊石光
裝甲兵工程學院學報 2015年2期
賈小平, 馬 駿, 于魁龍, 樊石光
(裝甲兵工程學院機械工程系, 北京 100072)
電傳動履帶車輛傳動系統方案研究
賈小平, 馬 駿, 于魁龍, 樊石光
(裝甲兵工程學院機械工程系, 北京 100072)
為提高電傳動履帶車輛的電機功率利用率,在改進雙側獨立電機驅動方案的基礎上,提出了一種基于功率耦合機構的驅動方案,使轉向再生功率盡可能通過機械方式回流。建立了該方案的運動學和動力學模型,對轉向時高速側輸入、輸出功率進行了分析比較。并利用RecurDyn進行了建模仿真分析,驗證了耦合機構傳動方案的可行性。結果表明:采用此方案可以顯著降低轉向時對電機功率的需求。
履帶車輛;電傳動;耦合機構;動力學特性
履帶車輛功率傳遞的傳動方式可分為機械傳動、液力傳動、液力機械傳動、液壓傳動、液壓機械傳動、電力傳動和機電復合傳動7種主要類型[1]。其中,電力傳動利用電能傳遞或者交換能量,與傳統的機械傳動相比具有如下優點:1)可實現無級變速,啟動和變速過程平穩;2)可按照行駛條件要求以最經濟的轉速運行;3)可實現任意半徑轉向,轉向性能良好;4)可實現靜音行駛,減小行駛振動和噪聲,提高乘員的舒適性。目前履帶車輛中電機技術和控制技術應用已取得了很大進步,但發展高功率密度電機是履帶車輛電傳動技術的瓶頸。因此,提高傳動系統中電機功率的利用率,對增強電傳動履帶車輛傳動系統的實用性至關重要。
履帶車輛電傳動的主要結構形式有雙側獨立電機驅動、零差速式電傳動、橫軸式電力機械傳動和倫克(REX)混合驅動4種方案[2],其中:前2種方案較為常用,但零差速式電傳動需要增加獨立的轉向電機和轉向機構,結構和控制復雜[3]。美國M113A3裝甲運輸車采用的雙側獨立電機傳動方案最為簡單[4],但這種方案對電機的過載性能要求較高,在大部分行駛工況下電機功率的利用率偏低。為提高電傳動履帶車輛的電機功率利用率,筆者在M113A3獨立電機傳動方案的基礎上,設計了一種基于功率耦合機構的傳動方案,并對其可行性進行了理論分析與仿真驗證。
1 傳動方案
1.1 M113A3獨立電機傳動方案
在M113A3獨立電機傳動方案中,發動機給左右兩側的牽引電機提供動力,帶動兩側履帶直線行駛,轉向過程是通過電子控制中心單元控制兩側牽引電機的轉速差來實現的,由于省去大量的機械部件,傳動裝置布置極為靈活,其傳動方案如圖1[5]所示。但這種傳動方案在電機功率的利用率方面有明顯缺點,轉向工況高速側履帶所需的牽引功率要比直駛工況大,低速側所需牽引功率較小,導致了牽引電機需要具有很大的過載能力,但低速側電機功率需求低。根據相關文獻報道,牽引電機必須具備很大的功率或者具備3倍以上的過載能力[2],牽引電機大部分直駛情況下是以部分特性工作,電機的功率利用率偏低[5]。

圖1 M113A3獨立電機傳動方案
1.2 基于耦合機構的傳動方案
在M113A3獨立電機傳動方案的基礎上,筆者設計了一種基于耦合機構的傳動方案,如圖2所示。可以看出:此傳動方案通過增加耦合機構來實現功率的耦合,使轉向過程中低速側牽引電機的功率可以通過機械方式回流到高速側,避免低速側電機功率通過電功率方式回流,降低牽引電機的過載系數[6-7]。圖3為耦合機構的工作原理,可見:耦合機構由2個相同的行星排組成,第1排行星架(j1)與第2排齒圈(q2)固連,第2排行星架(j2)與第1排齒圈(q1)固連;發動機動力經發電機轉化成電能傳遞到兩側牽引電機,兩側牽引電機的動力分別輸入到2個行星排的太陽輪(t1、t2)中,通過兩側行星架(j1、j2)輸出。本文分別從運動學和動力學的角度對該方案可行性進行理論分析與仿真驗證。
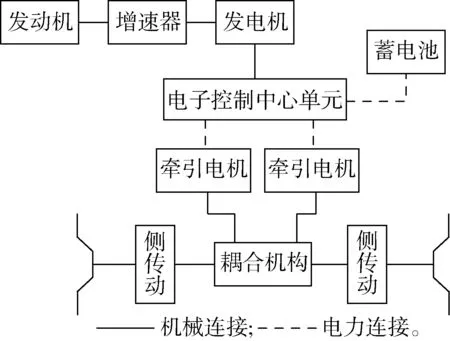
圖2 耦合機構電傳動方案

圖3 耦合機構工作原理
2 運動學分析
行星排3個構件之間的運動關系式為[1]
nt+knq-(1+k)nj=0,
(1)
式中:nt為太陽輪轉速;nq為齒圈轉速;nj為行星架轉速;k為行星排的特性參數。
在耦合機構中,由于一個行星排的齒圈與另一個行星排的行星架固連,因此得出如下關系式:
(2)
2.1 直駛工況
直駛時兩側牽引電機轉速相同,根據式(2)可得:nj1=nj2=nt1=nt2。此時耦合機構整體回轉,傳動比為1。
2.2 轉向工況
轉向時,隨著電機轉速差增大,耦合機構的傳動比也逐漸增大。其中,在中心轉向時需使nt1=-nt2,代入式(2)可得輸出轉速:
此時傳動比最大,為2k+1,耦合機構具有減速增扭效果。兩側履帶速度比與相對轉向半徑的關系為
(3)
式中:v2、v1分別為轉向時高、低速側履帶的速度;ρ為履帶車輛的相對轉向半徑;B為履帶中心距。
由式(2)、(3)可得

(4)
由式(4)可知ρ的大小與牽引電機的輸入轉速有關:當兩側電機輸入轉速越高,轉向半徑越大;當兩側電機轉速差越大,轉向半徑越小。這一特性符合履帶車輛的轉向特性,因此從運動學的角度來分析,所設計的傳動方案可行。
3 動力學分析
由于履帶車輛在轉向工況中所需轉矩明顯大于直駛工況,因此本文只對轉向工況進行動力學分析。其中,轉向工況分為大半徑轉向(ρ>0.5)、原地轉向(ρ=0.5)和中心轉向(ρ=0)3種工況。
3.1 大半徑轉向工況
由于耦合機構中一排齒圈與另一排行星架相互固連,因此,轉向低速側主軸受到3個力矩的作用:低速側履帶制動力換算到主軸上的力矩TL1、行星架力矩Tj1和高速側齒圈作用于主軸的力矩Tq2。同樣,高速側主軸也受到3個力矩的作用:高速側履帶牽引力換算到主軸上的力矩TL2、行星架力矩Tj2和低速側齒圈作用于主軸的力矩Tq1。其中:
(5)
式中:f為滾動阻力系數;G為車輛重力;rz為主動輪半徑;L為履帶接地段長度;η為主軸到地面之間的傳動效率;ic為側傳動比;μ為轉向阻力系數,根據經驗公式可得

其中μmax為最大轉向阻力系數。
根據耦合機構的連接關系,對內、外側主軸分別進行轉矩分析,可得:
(6)
又根據行星排內部構件的轉矩關系:
(7)
則由式(4)-(6)可得到行星架轉矩:
(8)
由式(6)、(7)可得到牽引電機轉矩:
(9)
3.2 原地轉向工況
原地轉向時,低速側履帶速度為0,該側的滾動阻力消失,兩側履帶牽引力換算到主軸上的轉矩為
(10)
結合式(6)、(7)、(10)可得:
(11)
牽引電機轉矩為
(12)
3.3 中心轉向工況
中心轉向時,兩側履帶速度大小相等、方向相反,所需牽引力大小相等、方向相反,則
(13)
計算得到牽引電機轉矩為
(14)
3.4 功率分析
根據轉速和轉矩分析,可以分別計算出高速側牽引電機輸入功率和行星架輸出功率。為了直觀比較,計算分析轉向時高速側輸入與輸出功率之比,結果如圖4所示。其中:曲線1為輸入功率與輸出功率之比隨ρ變化的曲線;曲線2為參照曲線,其值取1。

圖4 高速側輸入與輸出功率之比
由圖4可見:經過功率耦合,低速側電機功率通過機械方式回流到高速側,高速側電機輸入功率需求顯著降低,表明該耦合方案具有良好的特性。
4 仿真分析
為了驗證該傳動方案的可行性,運用多體動力學仿真軟件RecurDyn對履帶車輛進行仿真分析。其中:利用RecurDyn的齒輪工具包(Gear)對耦合機構進行了建模[8],2個行星排采用相同的參數,行星排特性參數k=2.25,建模結果如圖5所示。本藕合機構方案主要是為了提高小半徑轉向時的功率利用率,所以在此針對ρ=0.5和ρ=0兩種工況進行仿真分析。

圖5 耦合機構模型
在耦合機構的基礎上,建立了履帶車輛整車模型,2條履帶利用軟件RecurDyn的高速履帶子系統模塊(Track-HM)來建模[8],每側履帶有5個負重輪、1個主動輪、1個誘導輪和3個拖帶輪,單側履帶使用70塊履帶板;車體利用三維建模軟件SolidWorks進行建模并導入RecurDyn中。履帶車輛整車模型[9]如圖6所示。

圖6 履帶車輛整車模型
4.1 原地轉向工況
原地轉向時,低速側履帶速度為0,在模型中給定輸入轉速nt1=-4.5π,nt2=6.5π,如圖7所示;經仿真計算得到兩側主動輪輸出轉速如圖8所示。

圖7 輸入轉速

圖8 兩側主動輪輸出轉速
由圖8可知:內、外側主動輪轉速分別為vL1=0.154 rad/s,vL2=6.187 rad/s,與理論計算值VL1=0,VL2=2π=6.14 rad/s近似相等,表明仿真結果可靠。圖9為履帶車輛原地轉向軌跡,可見:仿真結果近似符合原地轉向特征。

圖9 履帶車輛原地轉向軌跡
4.2 中心轉向工況
中心轉向時,兩側履帶速度大小相等、方向相反,輸入轉速nt1=-5π ,nt2=5π,如圖10所示;經仿真計算,得到兩側主動輪輸出轉速如圖11所示。

圖10 輸入轉速

圖11 主動輪輸出轉速
由圖11可知:主動輪轉速仿真值為vL1=-3.056 rad/s,vL2=2.845 rad/s。由于仿真模型車體質心與車體幾何中心不重合,仿真結果中兩側履帶速度不完全相等,轉向圖形為一個小圓,近似于理論計算結果VL1=-2.85 rad/s,VL2=2.85 rad/s。履帶車輛中心轉向軌跡如圖12所示。

圖12 履帶車輛中心轉向軌跡
5 結論
本文在分析兩側獨立電機驅動的電傳動方案的基礎上,通過增加耦合機構提出一種改進方案,進行了履帶車輛的運動學和動力學分析,同時進行了建模仿真分析,通過理論計算和仿真模擬對比來驗證該方案的可行性。該方案主要具有以下優點。
1) 在直駛工況下,耦合機構中的2個行星排整體回轉,傳動比為1,有利于履帶車輛的高速行駛。
2) 在轉向工況下,耦合機構自身具有減速功能。根據電機輸入轉速的不同而具有不同的傳動比,其中,在中心轉向工況下具有最大的減速比2k+1。增加轉向扭矩,對于履帶車輛的轉向性能有一定的提升。
3) 雙側獨立電傳動履帶車輛最明顯的缺點就是高速行駛和順利轉向不能兼得,當車輛高速行駛時電機無法提供轉向所需的轉矩,轉向難度很大,耦合機構的良好特性可以改善這一問題。
本文研究的耦合傳動方案對履帶車輛的電傳動方案研究有一定的作用,同時為后續電傳動方案的深入研究分析奠定了基礎。
[1] 閆清東,張連第,趙毓芹,等. 坦克構造與設計[M].北京:北京理工大學出版社, 2007.
[2] 顏南明,馬曉軍,臧克茂.履帶裝甲車輛電傳動技術初探[J].兵工學報,2004,25(5):619-623.
[3] 廖自力,馬曉軍,臧克茂,等.履帶車輛電傳動方案比較分析[J].兵工學報,2006, 27(4):583-586.
[4] Shafer G.Electric Drive M113A3 Vehicle Refurbishment Project: Sacrament Electric Transportation Consortium RA93-23 Program [R].Carlisle Barracks,PA:Army War Coll,1997.
[5] 李宏才,閆清東,宋衛群,等.實現履帶車輛轉向功率機械循環的電傳動方案研究[J].機械設計,2011,28(3): 60-64.
[6] 蓋江濤,黃守道,周廣明,等.雙側電機驅動的功率耦合機構傳動方案設計方法[J].中國機械工程,2014,25(13):1739-1743.
[7] 韓振達,毛明,馬曉楓,等. 履帶車輛機電復合傳動耦合機構數學特征的研究[J].車輛與動力技術,2012,125(1):1-12.
[8] 焦曉娟,張湝渭,彭斌彬.RecurDyn多體系統優化仿真技術[M].北京:清華大學出版社,2010.
[9] 劉義.RecurDyn多體動力學仿真基礎應用與提高[M].北京:電子工業出版社,2013.
(責任編輯:尚菲菲)
Study on Transmission System Scheme of Electric Drive Tracked Vehicles
JIA Xiao-ping, MA Jun, YU Kui-long, FAN Shi-guang
(Department of Mechanical Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
In order to improve the utilization rate of the motor power for electric drive tracked vehicles,based on the improved bilateral independent motor drive scheme, a driving scheme based on power coupling mechanism is proposed to make the steering regeneration power to flow back as much as possible in mechanical means. Models of kinematics and dynamics of the scheme are built, and the high speed side steering input and output powers are comparatively analyzed. Meanwhile, modeling simulation analysis by using RecurDyn is done to verify the feasibility of the transmission scheme of coupling mechanism. The results show that using the scheme can significantly reduce the power requirements of motor.
tracked vehicle; electric drive; coupling mechanism; dynamic characteristics
1672-1497(2015)02-0035-05
2014-12-31
賈小平(1958-),男,教授。
TJ81+0.32
A
10.3969/j.issn.1672-1497.2015.02.007
