基于靈敏度分析的EPS轉向性能試驗客觀評價指標
2015-06-13 07:30:24張澤星陳國迎宗長富
吉林大學學報(工學版) 2015年4期
張澤星,陳國迎,宗長富
(吉林大學 汽車仿真與控制國家重點實驗,長春130022)
0 引 言
EPS 系統對汽車轉向性能有顯著影響[1]。高速回正性能試驗車速為最高車速的70%,側向加速度達到4m/s2,轉向半徑達到400m,但由于國內沒有專用的試驗場地,只能在寬度為50~100m 的機場跑道上進行試驗[2],故EPS車輛進行高速回正性能調試試驗存在難度。EPS 系統參數與車輛轉向性能之間存在不明確的耦合關系,參數的調試與標定多依賴調試者的主觀經驗,調試周期長且效果一般。
為了掌握EPS系統與轉向性能的影響關系,國內外學者在EPS系統匹配和優化方面進行了大量研究工作。美國TRW 公司對中心區進行量化并建立置信區間模型,從而確定轉向系統剛度與中心區性能的影響關系[3]。日本本田公司通過人-車系統模型進行高速換道仿真實驗研究汽車高速小角度轉向時的操縱性能[4]。伊朗汽車工業集團對EPS助力矩的輸出位置對轉向性能的影響進行了分析,為EPS系統的結構設計和布置提供了理論依據[5]。在國內,吉林大學對EPS系統的控制參數和機械參數對轉向性能的影響進行了研究,確定了系統參數的匹配方法和原則[6]。北京理工大學對EPS助力特性曲線與轉向性能的關系進行了分析,確定了EPS助力特性曲線的匹配方法[7]。
文獻[8]基于相關分析理論,以8輛不同車型的試驗數據為基礎,應用統計學規律,研究了高速回正性能試驗的替代試驗,其中殘留橫擺角速度、橫擺角速度總方差、穩定時間、橫擺角速度自然頻率和相對阻尼系數都有合適的替代指標。而橫擺角速度超調量與中心區正弦試驗指標“0 N·m時的側向加速度”相關系數為-0.88,由于表現的物理意義不同,無法替代。但兩個指標所表現出的高負相關性將為EPS車輛高速回正性能調試提供理論指導方向。
本文以文獻[8]中結論為基礎,通過仿真手段,應用靈敏度分析理論分析EPS系統參數與兩個試驗指標的關系,并結合動力學分析解釋兩個指標的變化規律,最后以某EPS試驗車為平臺,進行EPS系統參數3個水平值下的實車試驗。
1 聯合仿真模型及靈敏度分析方案
1.1 聯合仿真模型
仿真研究EPS系統參數與車輛轉向性能的關系。基于Matlab/Simulink 搭建EPS 系統模型,車輛模型采用Carsim 商用軟件,從而建立EPS系統與車輛模型聯合仿真平臺,如圖1 所示。
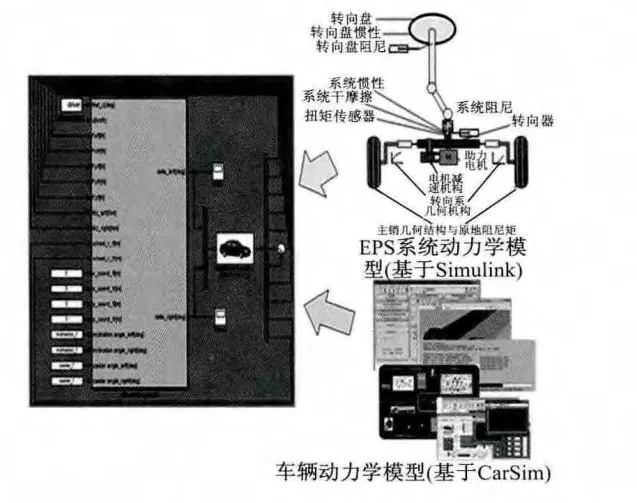
圖1 EPS系統模型與Carsim 聯合仿真平臺Fig.1 Co-simulink platform for EPS system model and Carsim model
EPS系統模型輸入為左右車輪的輪胎力和車輪定位參數,輸出為左右車輪的轉向角。Carsim 車輛模型的輸入為左右轉向車輪的轉向角,輸出為輪胎力和車輪定位參數。通過調整EPS系統參數,進行Simulink 與Carsim 的聯合仿真。
1.2 靈敏度分析方案
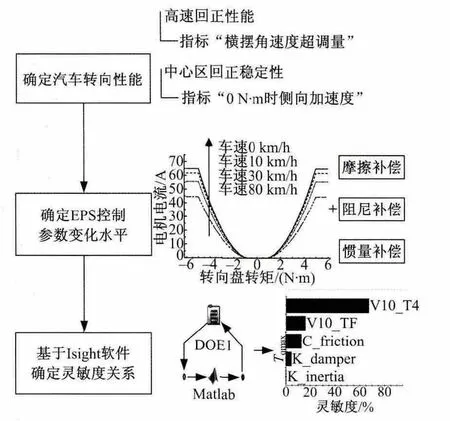
圖2 靈敏度分析方案Fig.2 Scheme of sensitivity analysis
靈敏度分析方案如圖2所示。首先轉向性能評價指標為高速回正性能指標“橫擺角速度超調量”及中心區回正穩定性能評價指標“0N·m 時側向加速度”。其次,確定進行靈敏度分析的EPS系統參數包括助力特性參數和系統補償參數,并定義系統參數的3個變化水平值。最后,基于Isight軟件設計EPS系統參數的正交試驗表,并通過Matlab 與Carsim 聯合模型進行仿真試驗,計算每組正交試驗下的指標值,然后采用極差分析法確定EPS系統參數與轉向性能的靈敏度關系。
2 系統參數及水平值確定
EPS系統參數包括助力特性參數和系統補償參數。靈敏度分析時,根據調試經驗和實車測量確定系統參數實際取值范圍,每個參數取3個變化水平值,定義為基準值、偏小水平值、偏大水平值。
2.1 助力特性參數水平值確定
助力曲線為多點折線擬合曲線特性,助力特征點的確定參照文獻[9],助力死區和助力飽和區臨界轉向盤力矩分別為1N·m 和5N·m。隨著助力特征點數量的增多,助力特性會逐步接近理想的曲線型助力效果,但會導致調試工作量增大。對于本文的靈敏度分析方法,不同的特征點數量只會導致程序運算量存在差異,故將助力特性曲線轉矩間隔定義為1N·m。既能獲得近似于曲線型的助力特性,又能減少調試工作量,提高靈敏度分析時的程序運算效率。
通過統計5款以上A 級對標車的操縱穩定性試驗數據,轉向輕便區和強路感區的分界值是3N·m。Ⅰ區為助力死區(0~1N·m),Ⅱ區為強路感區(1~3N·m),Ⅲ區為轉向輕便區(3~5 N·m),5 N·m 以上為助力飽和區,如圖3 所示。
在進行高速回正性能試驗時,轉向盤轉矩基本為0N·m,故定義100km/h車速下的助力曲線上的助力死區臨界轉向盤轉矩值為靈敏度分析參數。根據EPS調試經驗,助力死區的臨界轉向盤轉矩基準值設定為1N·m,另外兩個水平值分別設定為0.5N·m 和1.5N·m。
在進行中心區連續正弦試驗時,轉向盤力矩不超過4N·m,故只需考察100km/h下助力死區Ⅰ和強路感區Ⅱ的助力特性參數。根據各參數的實際取值范圍,定義各特性參數水平值如表1所示。
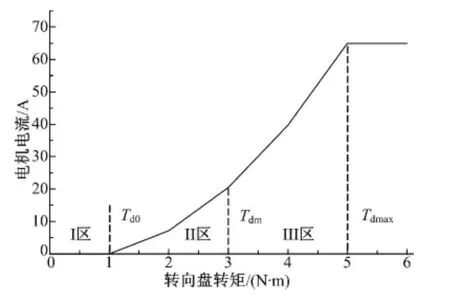
圖3 EPS助力特性曲線區域Fig.3 Areas for the power characteristic curve of EPS
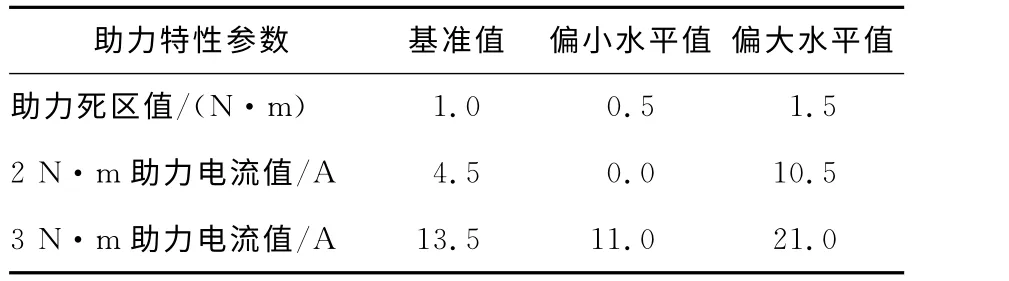
表1 助力特性參數水平值Table 1 Levels of power characteristic parameters
2.2 系統補償參數水平值確定
EPS系統補償參數包括慣量補償系數、阻尼補償系數和摩擦補償電流。系數值以完全克服轉向系統的慣性力矩、阻尼阻力矩和摩擦阻力矩為依據來確定,并取最大值。通過在K&C試驗臺上對某EPS試驗車的多次測量,得到轉向系統的慣性力矩、阻尼阻力矩和摩擦阻力矩的統計值分別為0.107kg·m2、0.29N·m(rad/s)、3.62N·m。然后根據實車調試經驗在變化范圍內定義了系統補償參數的基準值,經過計算得到各個系統補償參數的偏小水平值和偏大水平值,如表2所示。
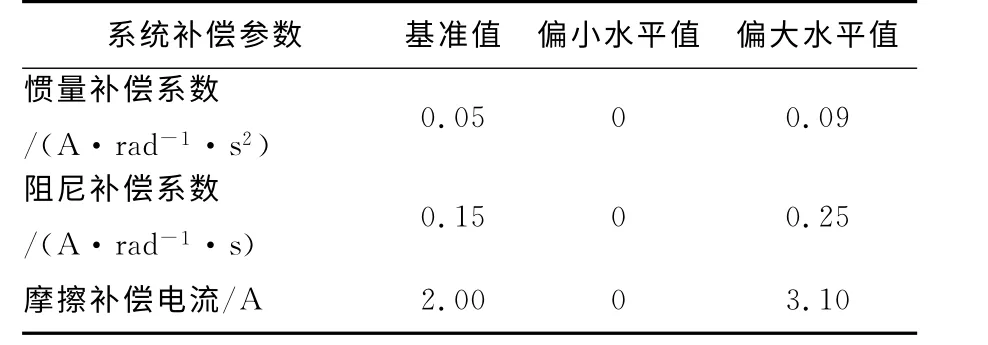
表2 系統補償參數水平值Table 2 Levels of system compensation parameters
3 靈敏度分析
3.1 Isight軟件
Isight軟件旨在解決在產品設計中,設計參數多、運行環境復雜、性能指標相互制約等問題,能夠快速分析出參數的敏感性,并能進行品質優化[10]。它能代替工程人員處理重復性強、易出錯的數字處理及設計工作[11]。
3.2 正交試驗設計
正交試驗設計通過正交表的方式考慮多因素、多水平的影響,應用統計學方法如極差分析方法、方差分析方法等對試驗結果進行分析[12-14]。
本文采用正交設計極差分析方法,對EPS系統參數與轉向性能的靈敏度進行分析。該靈敏度關系體現的是系統參數變化對轉向性能指標的相對影響關系,而非絕對關系。但該方法能使各參數、各水平分布均勻,試驗次數減少,從而有效地提高試驗效率。同時在每組正交系統參數下,易于對靈敏度分析結果進行實車試驗驗證。
正交試驗正交表定義為LN(QM),N 為試驗次數,M 為系統參數數量,Q 為每個參數的水平值數量。以3個系統參數為例,每個系統參數取3個變化水平值,正交試驗設計正交表為L9(33),如表3所示。V1、V2、V3為3個變化水平值,V2為基準值,V1為偏小水平值,V3為偏大水平值。
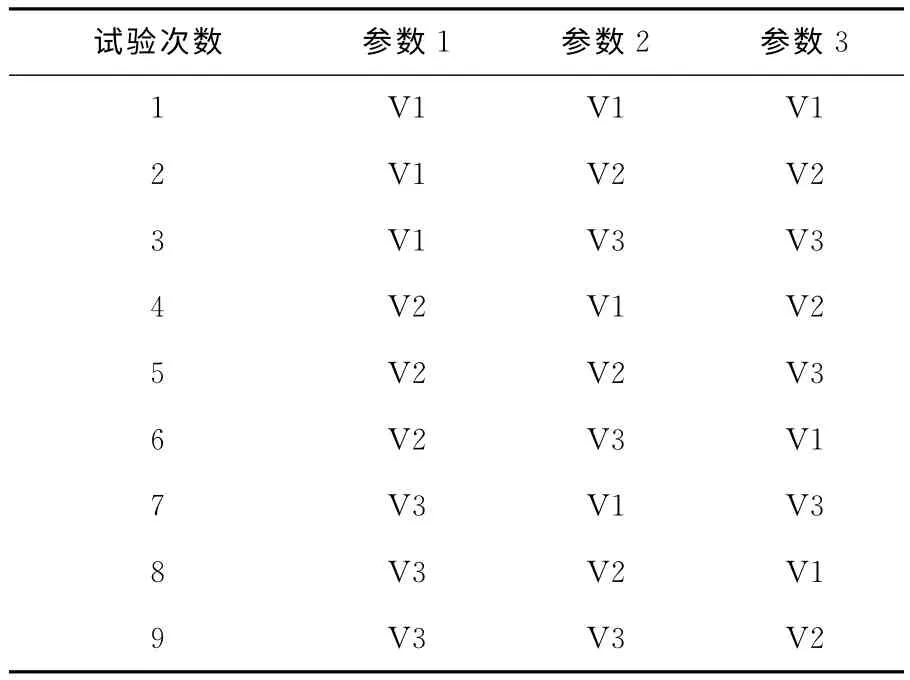
表3 L9(33)正交表設計Table 3 Orthogonal design table for L9(33)
3.3 靈敏度分析結果
EPS系統參數與“橫擺角速度超調量”、“0 N·m時的側向加速度”的靈敏度關系如圖4、圖5所示。
由圖4可知,阻尼補償系數和摩擦補償電流與橫擺角速度超調量具有較大的靈敏度關系,助力死區的轉向盤力矩和慣性補償系數具有相對較弱的敏感性,為次要的影響參數。
由圖5可知,0N·m 時側向加速度與橫擺角速度超調量具有相同的影響參數,助力死區為次要影響參數,慣量補償系數的敏感度幾乎為零,可以忽略。
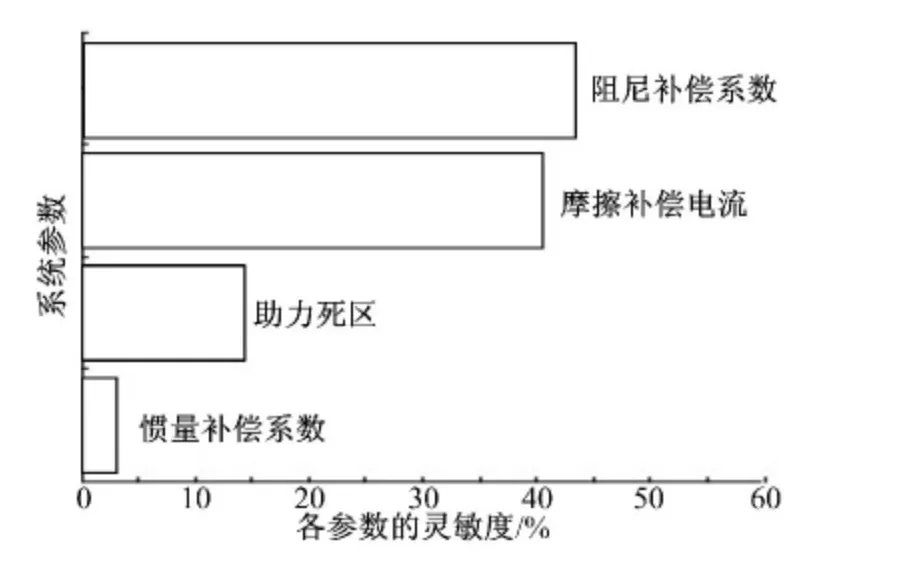
圖4 系統參數與橫擺角速度超調量的靈敏度關系Fig.4 Sensitivity relationship between system parameters and yaw rate overshoot
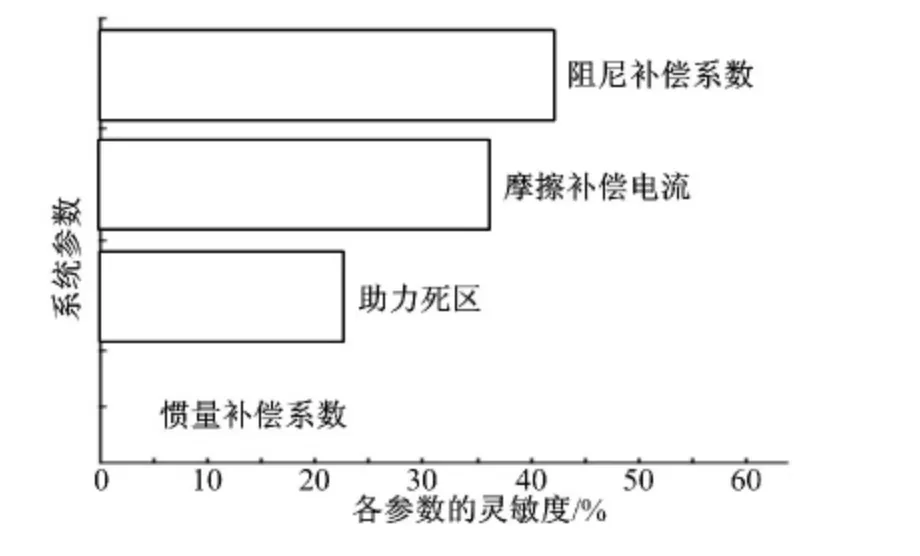
圖5 系統參數與0N·m 時側向加速度的靈敏度關系Fig.5 Sensitivity relationship between system parameters and lateral acceleration at 0N·m
本文取對轉向性能影響力較高的前兩位影響參數,即阻尼補償系數和摩擦補償電流。對比圖4和圖5兩幅圖可知,兩個指標與系統參數之間的敏感性程度相似。兩個指標的相關性系數為-0.88,說明兩個指標具有較大的負相關性,即調試系統參數使指標“橫擺角速度超調量”減小,而指標“0N·m時側向加速度”會增大。
從系統動力學角度分析以上影響關系如下:
(1)0N·m 時側向加速度表征了轉向盤轉向中間位置過程中,轉向盤力矩為零,即回正力矩等于系統阻力矩時的側向加速度值。回正力矩包括系統結構回正力矩和系統補償回正力矩,系統阻力矩包括摩擦阻力矩、阻尼阻力矩和慣性阻力矩,在中心區附近,由于轉向盤角加速度較小,慣性阻力矩基本為零,摩擦阻力矩基本恒定,阻尼阻力矩隨轉向盤轉速降低而減小。相同角速度下,當增大阻尼補償系數和摩擦補償電流時,系統補償回正力矩變大,摩擦阻力矩和阻尼阻力矩基本不變,故只有系統結構回正力矩值更小,即更接近轉向盤中間位置時,轉向系統回正力矩值才會收斂并等于系統阻力矩。即轉向盤力矩零點對應的位置更接近轉向盤中間位置,該點的側向加速度值也趨于零。
(2)橫擺角速度超調量表征了轉向盤轉至并穩定到中間位置過程中,橫擺角速度的最大震蕩程度。高速回正試驗中,轉向盤力矩為零,回正力矩克服系統阻力矩使轉向盤回到中間位置。回正力矩成分同樣包括系統結構回正力矩和系統補償回正力矩。當增大阻尼補償系數和摩擦補償電流時,系統補償回正力矩增大,導致轉向盤回正角速度變大。轉向盤轉過中間位置后,系統結構回正力矩與系統阻力矩同向,并克服系統補償回正力矩使轉向盤角速度減小。當角速度等于零時,轉向盤開始轉向中間位置。故增大的系統補償回正力矩,需要更大的系統結構回正力矩克服補償回正力矩及慣性,結構回正力矩值隨轉向盤至中間位置的距離增加而增加,從而導致超調量增大。
4 實車試驗
4.1 試驗設計
基于永磁同步電機EPS開發原型控制器,并基于國內某品牌車開發了EPS試驗車。以該車為試驗平臺,改變阻尼補償系數和摩擦補償電流值,先后取基準值、偏小變化水平值、偏大變化水平值進行高速回正性能試驗和中心區正弦試驗。
高速回正試驗工況:以車速100km/h 直線行駛,轉動轉向盤使側向加速度達到2 m/s2,穩定數秒后撒手回正。記錄橫擺角速度時間歷程曲線,如圖6所示。經數據處理程序得到指標“橫擺角速度超調量”值,如表4所示。

表4 高速回正性能試驗指標Table 4 Indice of high-speed returnability test %
中心區正弦試驗工況:以車速100km/h 直線行駛,轉向盤轉動頻率0.2(100%±10%)Hz,幅值變化符合正弦曲線,峰值使側向加速度為2 m/s2。記錄數據轉向盤轉矩和側向加速度,并畫出轉向盤轉矩相對側向加速度曲線,如圖5所示。通過數據處理程序得到指標“0N·m 時側向加速度”的偏大水平值、偏小水平值、基準值分別為0.52、1.04、0.68m/s2。
4.2 試驗結果分析
由圖6(a)(b)中左右方向橫擺角速度的時間歷程曲線可知,在高速回正狀態下,當阻尼補償系數和摩擦補償電流取值依次為偏小水平值、基準值、偏大水平值時,橫擺角速度超調量有明顯增大的趨勢。通過實驗數據處理得到的指標“橫擺角速度超調量”也證明了橫擺角速度超調量對系統的兩個參數變化的響應趨勢。
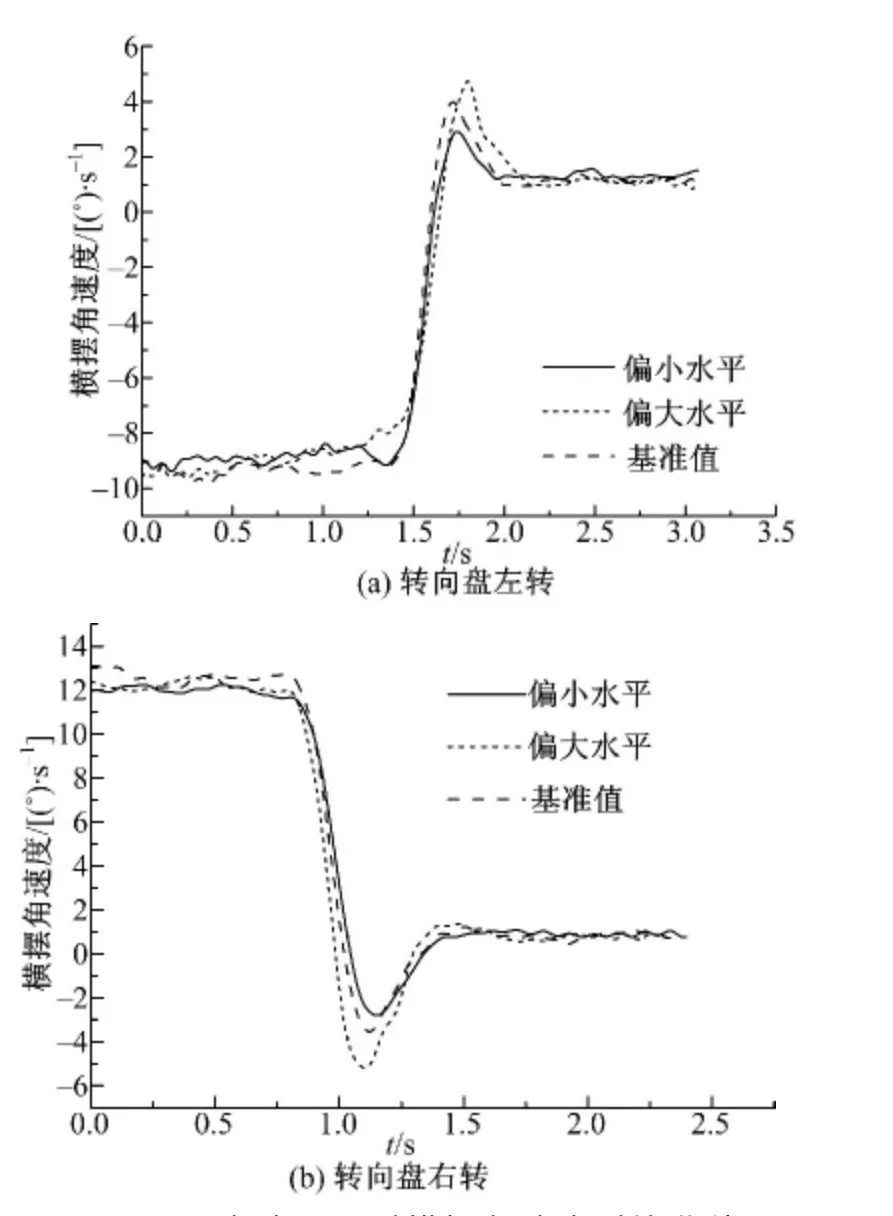
圖6 高速回正時橫擺角速度對比曲線Fig.6 Correlation curve of yaw rate on high-speed returnability condition
由圖7中轉向盤轉矩與側向加速度曲線可知,當阻尼補償系數和摩擦補償電流的取值增大時,曲線與橫軸交點的絕對值有明顯變小的趨勢,即轉向盤轉矩為0N·m 時所對應的的側向加速度減小,轉向盤也就越接近中間位置。4.1 節中指標“0N·m 時側向加速度”也證明了該指標對阻尼補償系數和摩擦補償電流的響應趨勢。
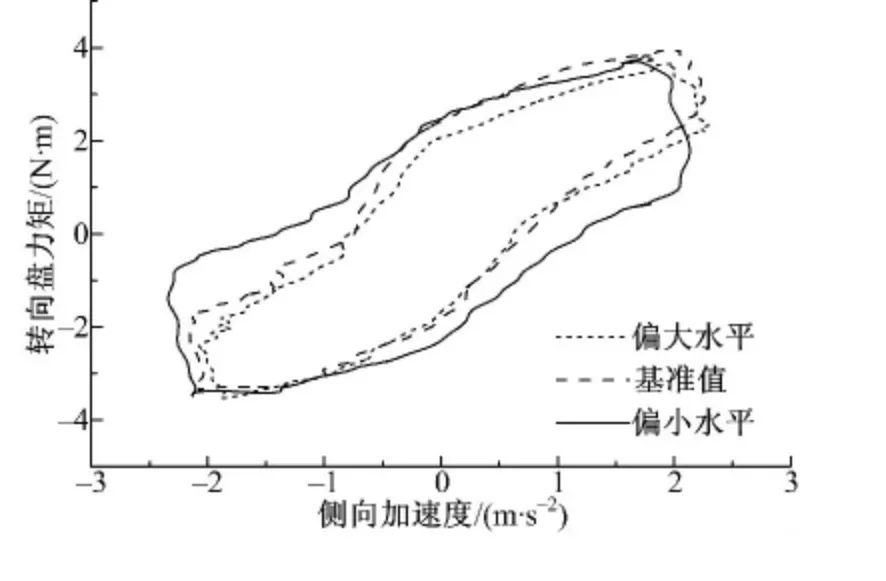
圖7 中心區轉向盤轉矩與側向加速度關系曲線Fig.7 On-center correlation curve of steering-wheel torque and lateral acceleration
由于實車試驗中存在著噪聲等干擾,故試驗曲線會存在一定的失真,沒有反應出真實的響應量。但對比曲線及指標給出的變化規律驗證了系統參數的改變與性能指標之間的響應特性,以及兩個指標之間的相關性關系。
5 結 論
(1)基于實車調試經驗和實車測量計算系統參數的實際取值范圍,定義系統參數的基準值、偏小水平值、偏大水平值,能夠更貼近實車應用,并且很好地反應實車調試時的變化規律。
(2)基于正交設計極差分析法進行正交試驗,能夠通過安排較少的試驗次數對多參數、多水平進行平均分配,提高了試驗效率。同時從相關性分析及動力學分析兩方面對靈敏度分析結果進行解釋,更全面地揭示了兩個指標之間的統計學變化規律,以及導致這種現象的內在原因。
(3)以EPS試驗車為平臺,設計了針對高速回正性能和中心區回正穩定性的實車試驗,從實際應用的角度證實了靈敏度分析和動力分析的結論是正確的。
[1]向丹.電動助力與主動轉向組合系統的控制研究[D].廣東:華南理工大學機械與汽車工程學院,2012.Xiang Dan.Study on the combined system of EPS and AFS[D].Guangdong:School of Mechanical and Automotive Engineering,South China University of Technology,2012.
[2]郭孔輝.汽車操縱動力學原理[M].江蘇:江蘇科學技術出版社,2011:37-40.
[3]Peppler S A,Johnson J R,Williams D E.Steering system effects on on-center handling and performance[C]∥SAE Paper,1999-01-3765.
[4]Yoneda A,Miyoshi T,Shimizu Y.Cogging torque target and design of motor for EPS[C]∥SAE Paper,2006-01-1320.
[5]Mohammadi H,Kazemi R.Simulation of different types of electric power assisted steering(EPS)to investigate applied torque positions'effects[C]∥SAE Paper,2003-01-0585.
[6]朱海.電動助力轉向匹配分析及性能評價研究[D].長春:吉林大學汽車工程學院,2004.Zhu Hai.Study on performance evaluation and matching analysis for EPS[D].Changchun:College of Automotive Engineering,Jilin University,2004.
[7]Shi Pei-ji,Zhang Qun,Lin Cheng.Electric power steering system matching and hardware-in-the-loop simulation of economical cars[C]∥International Conference on Electrical Machines and Systems(ICEM),Beijing:IEEE,2011:1-4.
[8]王長青.乘用車中心區操縱穩定性客觀評價指標體系研究[D].長春:吉林大學汽車工程學院,2012.Wang Chang-qing.Study on objective evaluation index system of on-center handling for passenger car[D].Changchun:College of Automotive and Engineering,Jilin University,2012.
[9]施國標.電動助力轉向匹配分析及性能評價研究[D].長春:吉林大學汽車工程學院,2004.Shi Guo-biao.Analysis on matching EPS and study on performance evaluation[D].Changchun:College of Automotive Engineering,Jilin University,2004.
[10]李玉玲.體驗精湛的技術和服務-采埃孚(ZF)德國之旅[J].汽車與配件(技術與市場),2013(7):18-28.Li Yu-ling.Experience the superb technology and service-(ZF)German visit[J].Automobile and Parts(Technology and Market),2013(7):18-28.
[11]任利.基于Isight的多學科設計優化平臺的研究與實現[D].青島:山東科技大學機械電子工程學院,2006.Ren Li.Study and implementation of multidisciplinary design optimization platform based on Isight software[D].Qingdao:School of Mechanical and Electronic Engineering,Shandong University of Science and Technology,2006.
[12]Yuan Xiao-hong,Chen Chang-sheng,Xia Kai,et al.Optimization and simulation of vehicle powertrain system based on orthogonal experimental design[C]∥Asia-Pacific Power and Energy Engineering Conference(APPEEC),Wuhan,IEEE,2011:1-4.
[13]He Q S,Liu X N,Xiao S F.Application of orthogonal experimental design on reliability and sensitivity analysis[J].Advanced Materials Research,2011,211:651-655.
[14]Li Yong-xian,Sun Ming-li.An algorithm of robust design:orthogonal optimum design and variance ratio analysis[C]∥International Technology and Innovation Conference,Xi'an,2009:1-5.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
科學大眾(2021年9期)2021-07-16 07:02:40
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
