基于分數階PIλDμ 的橡膠壩充排水恒流控制
2015-06-13 07:30:40單澤彪石要武單澤濤石屹然史紅偉
吉林大學學報(工學版) 2015年4期
單澤彪,石要武,單澤濤,石屹然,史紅偉
(1.吉林大學 通信工程學院,長春130022;2.諾博橡膠制品有限公司,河北 保定072550;3.長春理工大學電子信息工程學院,長春130012)
0 引 言
橡膠壩充排水控制系統的恒定流量充排水控制對橡膠壩工程設施具有重要的意義。工業過程控制中流量控制的方式一般都是采用交流變頻調速器調節水泵電機的轉速,繼而實現輸出流量的平滑無級調節。當需要對這類由通用變頻器加感應電機構成的變頻調速系統進行控制時,采用常規PID 往往難以達到預定的控制效果[1-2],針對這類問題,杜欣慧等[1]提出了一種基于參數自調整模糊PID 控制的交流閉環變頻調速系統的設計方法;戴先中等[2]采用了一種神經網絡逆控制的方法,使得這種變頻調速系統獲得了更加優良的運行性能。然而上述研究都是基于系統結構不發生變化時的情況。
由于運行環境的復雜性和充排水系統結構設計的特點,橡膠壩充排水系統不僅表現出強非線性和大滯后性,而且還屬于一種變結構、變參數的控制系統。針對此問題,本文提出采用能滿足系統穩定性和魯棒性要求的分數階PIλDμ對其進行充排水恒流控制。分數階PIλDμ是把傳統整數階PID 的階次推廣到分數階領域,它不僅僅是比整數階PID 控制器多了兩個自由度——積分階次和微分階次,使其具有更大的調節范圍,更重要的是它具有比整數階PID 更好的控制品質及更強的魯棒性[3]。目前已提出的幾種重要的分數階控制器有TID 控制器[4]、CRONE控制器[5]、P(ID)μ控制器[6]以 及PIλDμ控 制 器[7]等。其 中 分 數 階PIλDμ控制器在一定范圍內對本身和被控對象的參數變化不敏感,在穩定性和動態性能方面具有整數階PID 控制器不可比擬的優勢。
在分數階PIλDμ控制器應用研究方面,人們也做了不少的工作,如文獻[8]針對二階慣性系統的速度控制設計了一個分數階PIλDμ控制器、文獻[9]在一般時滯系統方面進行了分數階魯棒控制研究、文獻[10]針對車輛方向控制進行了分數階PDμ控制器的研究。然而,學者們的研究大多都是針對不同系統模型做的理論仿真研究,在實際系統中真實運用卻鮮見報道。
作者基于松花江壅水壩實際工程項目,首先把實際系統中的通用變頻器及其直接驅動的水泵電機看作一個整體——變頻調速控流系統,給出了相應的數學模型,并從理論上證明了分數階PIλDμ控制器對于該充排水系統具有較好的魯棒特性;然后把該分數階PIλDμ控制器數字實現化后應用于充排水實際系統中進行恒流量控制與調節;最后給出了恒流量充排水的實際控制運行曲線,結果證明了本文方法的有效性。
1 橡膠壩充排水控制系統
1.1 充排水系統
橡膠壩主要由橡膠壩袋、土建工程及充排水系統三部分組成,其中充排水系統主要由遠程監控系統、充排水泵、輸水管路、變頻器、電氣控制裝置、水位監測設備、壩袋高度及內壓檢測裝置等組成。根據壩袋高度、壩袋內壓以及上下游水位,通過變頻設備對水泵電機的啟停/調速控制以及輸水管路上的電動閥的開關控制等進行壩袋充排水自動控制,圖1為實際充排水系統結構圖。
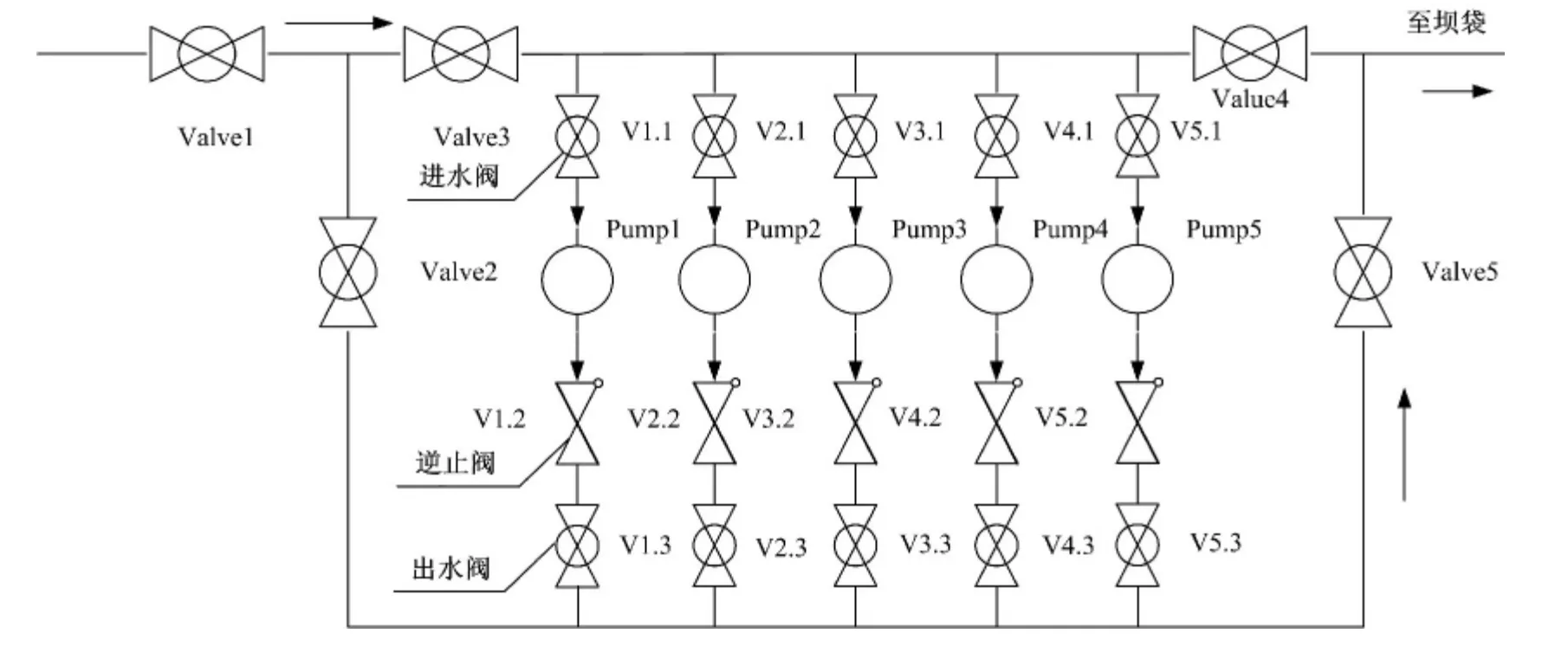
圖1 橡膠壩充排水系統結構圖Fig.1 System of filling and draining off water of rubber dam
上述充排水系統主要由5臺水泵電機及各管路進出水閥門構成,其中每臺水泵電機又由一臺變頻器進行變頻調速控制。充水過程:打開閥門1、閥門3及閥門5,使之形成相應的充水通路(圖1中箭頭表示方向),然后再啟動相應數量的水泵進行充水,各水泵出水先匯至同一管道,最后通過閥門5后再流至橡膠壩袋方向。排水過程與之正好相反,即打開閥門1、閥門2與閥門4及相應的進出口閥門,形成相應排水通路,然后再啟動相應數量的水泵對壩袋進行排水調節。
此充排水系統的主要控制問題就是根據橡膠壩控制運行要求,在橡膠壩總充排水量允許范圍內,啟動相應數量的水泵對壩袋進行充排水,并在此過程中通過變頻器變頻調節,實現橡膠壩袋的總進、出水流量恒定,即設計一個控制器通過變頻器去調節水泵轉速,在因系統設定值改變導致泵啟動數量和出水閥門開度的變化或受到其他干擾情況下使壩袋的總進、出水流量在較短的時間內穩定在預先設定的狀態,并滿足一定的動態性能和允許的靜態誤差要求。同時還需滿足各運行水泵出口壓力均衡,以防止某出口壓力偏小造成其逆止閥關閉的情況發生。
1.2 系統模型的建立
橡膠壩充排水系統中每臺水泵電機都由一臺通用型變頻器進行變頻調速控制,把每臺變頻器及其驅動的水泵電機看成一個整體,稱之為變頻調速控流系統。如果忽略各水泵在整個充排水系統中的位置結構差異,那么此充排水系統可以看成由5個相對獨立且特性相同的變頻調速控流子系統構成,對于每個變頻調速控流子系統來說,給定變頻器一個頻率信號輸入就能得到水泵的一個流量輸出。
由充排水系統的特性可知,水泵由初始狀態向管道充排水的恒流狀態過渡時,可分為流量上升過程與恒流過程,其中流量上升過程,可近似為一個時間常數T1比較大的慣性環節;恒流過程中,流量可認為基本不變,是一個純滯后過程,則供水系統的模型可表示為:

式中:K1為供水系統的增益;τ為供水系統的時滯常數。
變頻器和水泵電機可近似等效為時間常數為T2的一階慣性環節[11],表示為:

式中:K2為調速系統的增益。
系統中的其他控制或檢查環節,如繼電器控制轉換、流量測量轉換等環節的慣性時間及延遲時間與供水系統的時間常數相比都可以忽略,均可等效為比例環節,故整個變頻調速控流子系統的模型可表示為帶滯后的兩個慣性環節的串聯,如下式表示:

式中:K 為系統的總增益。
1.3 控制系統設計及其結構分析
根據橡膠壩充排水系統實際控制要求,設計了如下雙閉環控制方案,其中外環采用的是流量反饋控制,控制器應用分數階PIλDμ控制;內環采用的是壓力反饋控制,控制器應用PI控制,由于該系統中含有5個相對獨立的變頻調速控流子系統,故設計了5個并級形式的內環控制環節。主回路(外環)用來進行總進、出水流量的控制,實現恒流量充排水;副回路(內環)用來進行各水泵出口壓力的調節,保證各出口壓力均衡。當總進、出水流量高于或低于給定值時,流量控制器發出校正信號,修正水泵控制系統的給定值,使水泵減少或增加進、出水量,經過校正過的進、出水量將等于給定值。控制系統框圖如圖2所示。
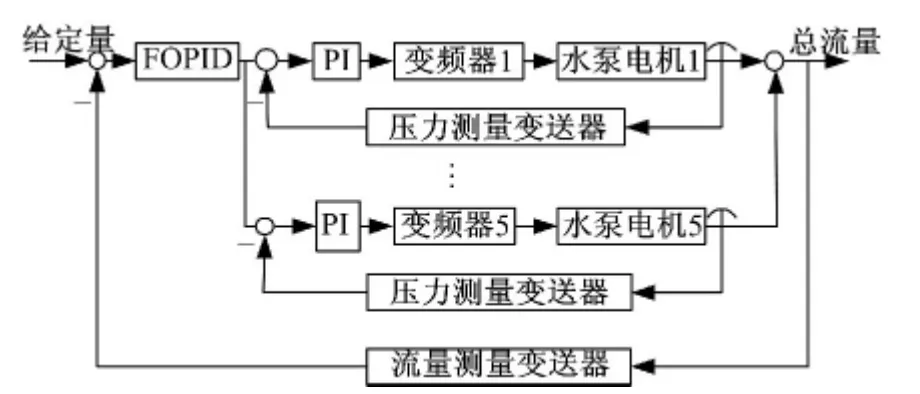
圖2 橡膠壩充排水雙閉環控制系統框圖Fig.2 Two closed loop control system of filling and draining off water of rubber dam
圖2 中,壓力PI控制器傳遞函數為Cp(s)=Knp+Kni/s,結合式(3)變頻調速控流子系統的傳遞函數可知整個內環部分的閉環傳遞函數為:

再設分數階PIλDμ控制器的傳遞函數為Cf()s,可得整個充排水系統的開環傳遞函數為:


式中:N 為實際水泵啟動的數量,可見,當N 取不同值時,系統結構是變化的。
2 分數階PIλDμ 控制器
2.1 分數階微積分
一般的分數階微積分算子可用下式來表達:
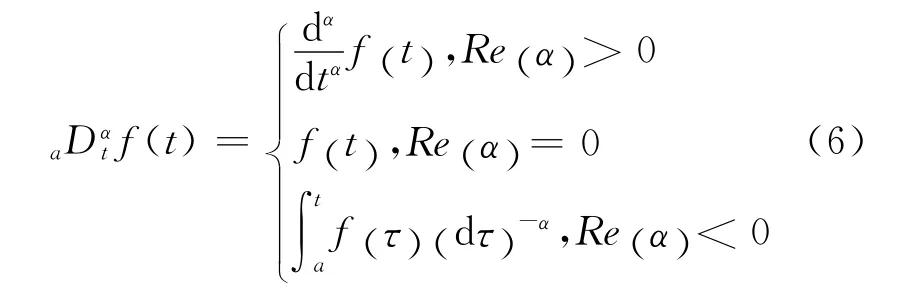
從不同角度去考察分數階微積分可以得到不同的定義,其中最著名的是Riemann-Liouville(RL)定義,其定義如下:

式中:n-1≤α≤n,n∈N;Γ(·)為Gamma函數。
Laplace變換不僅適用于整數階系統,同樣也適用于分數階系統。根據RL 定義,分數階微分的Laplace變換為:

分數階積分的Laplace變換為:

2.2 分數階PIλDμ 控制器及其數字實現
整數階PID 控制器的傳遞函數描述為:

式中:U ()s 為控制器的輸出;E ()s 為控制器的誤差輸入。
把上式中的微分與積分項的階次推廣到實數,便可以得到分數階PIλDμ控制器的傳遞函數,即:

式中:積分階次λ 和微分階次μ 可以是任意正實數,而且積分項是sλ,也就是說在對數相頻曲線圖中,它的斜率不再是-20dB/dec,而是-20λ dB/dec。式(11)所對應的時間域方程可以表示為:

與傳統整數階PID 控制器相比,分數階PIλDμ控制器除了具有KP、KI、KD三個可以用來調整系統性能的參數外,還增加了一個積分階次λ和一個微分階次μ 兩個參數。通過合理的參數選擇,分數階PIλDμ控制器在提高系統靈活性、魯棒性以及總體控制性能等方面將起到很大的積極作用,從而取得更好的控制效果。
分數階控制器是無限階次,通過計算機具體實現時需要對微積分算子進行離散化。在此采用Tustin+CFE 直接離散化方法[12]對其進行數字實現,把分數階微積分sα用Tustin算子來表示得到階次為α的生成函數為:

式中:T 表示采樣時間。
然后用連分式將式(CFE)近似展開,形式如下:
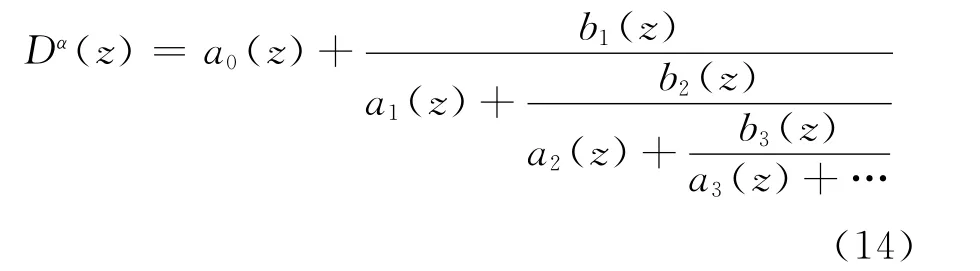
式中:Pp(z-1)、Qq(z-1)均 為 變 量z-1多 項 式;CFE(· ) 表示進行連分式展開。一般為計算方便取p =q=n,n為數字實現的近似階次。
2.3 基于分數階PIλDμ 的系統魯棒性分析
使用離散的分數階PIλDμ控制器對前面所述的充排水系統進行魯棒性分析,其中變頻調速控流子系統參數K=1.25,T1=35s,T2=6s,τ=65s是由現場測試數據辨識而來,并經現場調試整定確定分數階PIλDμ控制器參數為KP=0.42,KI=0.002,KD=10.5,λ=0.81,μ=0.92;內環壓力PI控制器參數KnP=0.24,KnI=0.05,用Tustin+CFE直接離散方法,采樣周期T=1s,逼近階次為3,并取N =2,即有兩臺水泵在運行工作狀態時,得到基于分數階PIλDμ控制器的充排水系統開環傳遞函數Bode圖如圖3所示。由圖3可知,該控制器對于在有兩臺水泵工作時的該系統具有較好的頻域特性,即在截止頻率ωc處幅頻特性比較平坦,說明其閉環系統具有較好的魯棒穩定性,而且在截止頻率ωc附近其相頻特性曲線亦比較平滑且相對平坦,說明系統具有較好的增益魯棒性。
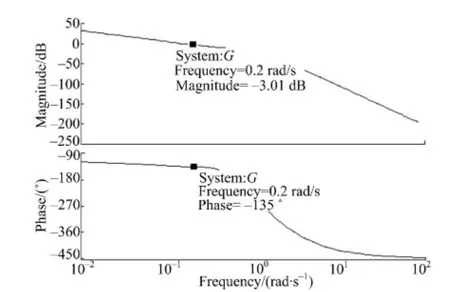
圖3 基于分數階PIλDμ 的充排水系統開環傳遞函數Bode圖Fig.3 Bode diagram with fractional order PIλDμ controller
3 現場實際控制及運行效果分析
在松花江壅水壩工程項目中進行橡膠壩恒定流量充排水控制實驗,其中數據采集周期Tc=0.5s,其他控制器參數如同2.3節所述。該系統中硬件主要有ABB/ACS510-01型號變頻器,研華工業控制計算機,實現數據傳輸功能的西門子系列S7-300PLC,75kW、Y315L2-10型三相異步電動機,900ZLB-4型臥式離心泵,壓力及流量傳感器等,軟件主要是進行監視及控制功能的WinCC組態軟件,其中分數階PIλDμ控制率是在WinCC全局腳本編輯器中采用ANSI C實現。
實驗1:開啟兩臺水泵,進行開關閥實驗;實際運行曲線如圖4所示。
圖4中,Fs表示充水流量設定值,F表示實際充水流量值,P 表示實際調節頻率值。打開兩個壩袋進口閥門,并在t0時刻啟動1#、2#兩臺水泵,從圖4中可以看出,經過一段時間調節,實際流量穩定在設定值附近并保持基本恒定,說明設計的控制器具有較好的控制性能;在t1時刻,調整其中一臺水泵出口閥門開度至30%,在t2時刻,又重新完全打開該閥門,可見,流量稍微有點下調(t1時刻)和超調(t2時刻),隨后又很快回復到原設定值狀態,說明設計的控制器具有較強的抗干擾能力。另外從圖4中可以看出,此時控制輸出(頻率)基本保持不變且略高于最初狀態時,說明隨著橡膠壩不斷地充水,壩袋中的壓力也在不斷變大,體現出了壩袋充水過程中的非線性。
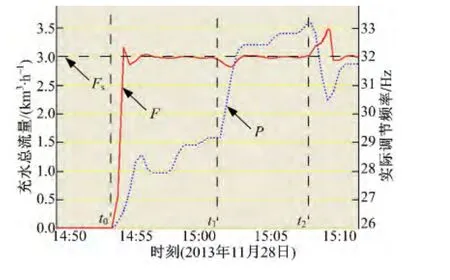
圖4 充水過程的實際控制曲線(開關閥實驗)Fig.4 Actual control curve of filling water process with open or close values
實驗2:開啟3臺水泵,進行加減泵實驗。實際運行曲線如圖5所示。
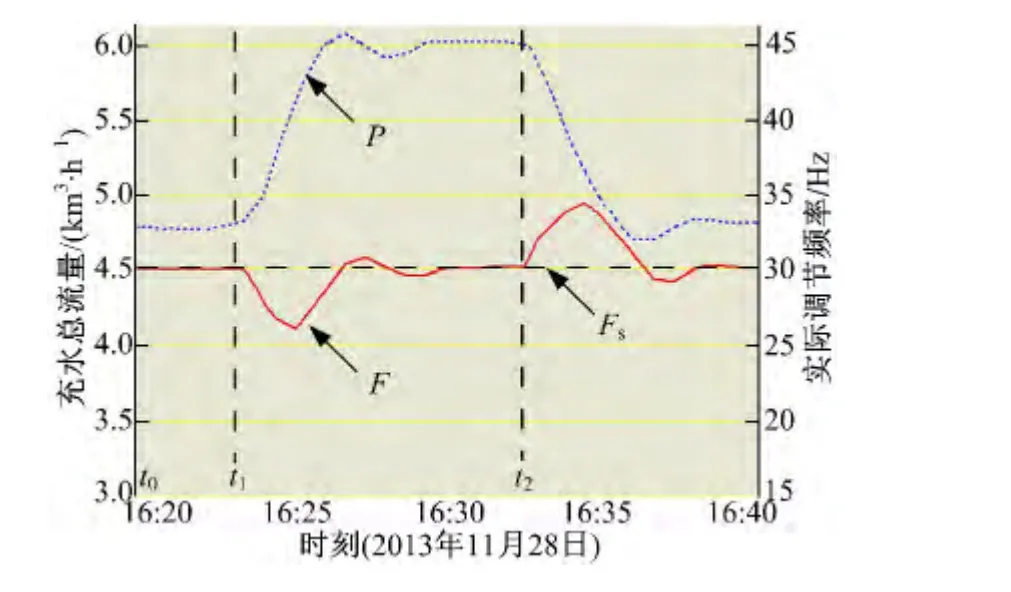
圖5 充水過程的實際控制曲線(加減泵實驗)Fig.5 Actual control curve of filling water process with increase or decrease pumps
圖5 中,初始運行狀態是3臺水泵(1#、2#與3#水泵)為三個壩袋進行充水,即圖中t0~t1時段,此時段中流量實際值等于流量設定值4.5 km3/h且保持恒定;在t1時刻,在保持流量設定值不變的情況下,對其進行減少一泵(如關閉1#泵)實驗,從圖5可以看出,流量曲線經過幾次振蕩后又達到設定值,可保持基本穩定,而此時頻率輸出在45 Hz處基本保持不變;在t2時刻,重新啟動剛才關閉的1#泵,流量又很快回到了原初始狀態,說明在系統結構發生變化時設計的控制器仍具有較好的控制性能。
從上面實際運行曲線可以看出,不僅是在初始啟泵過程中可以有效控制充水總流量達到橡膠壩恒流充水的目的,而且在加減泵(系統結構變化)和開關閥(參數變化)情況下仍能有效達到流量調節的目的,且都具有較好的控制效果。總體說明分數階PIλDμ控制方法具有較好的控制性能和較強的魯棒性,采用該控制方法有效解決了該充排水系統中的結構變化、時變性及非線性等問題,達到了在充水過程中的流量恒定的控制目的。另外經過現場運行試驗,在橡膠壩排水過程中同樣可以達到流量恒定控制的設計要求。
4 結束語
針對橡膠壩充排水這一復雜的實際控制系統,采用具有一定魯棒特性的分數階PIλDμ控制方法,在對分數階PIλDμ控制率進行數字實現后,把其應用于該系統中進行恒定流量充排水控制與調節,現場實際運行效果表明該分數階PIλDμ控制方法具有較好的抗干擾性和較強的魯棒性,取得了良好的控制效果,達到了恒流量充排水控制的設計目標及要求。
[1]杜欣慧,劉嬌,王孝,等.模糊控制與恒壓頻比控制在水泵調速系統中的實現[J].電氣技術,2008,9(1):20-23.Du Xin-hun,Liu Jiao,Wang Xiao,et al.The implementation of fuzzy control and constant U/f control to speed-regulating system of pump[J].Electrical Engineering,2008,9(1):20-23.
[2]戴先中,劉國海,張興華.恒壓頻比變頻調速系統的神經網絡逆控制[J].中國電機工程學報,2005,25(7):109-114.Dai Xian-zhong,Liu Guo-hua,Zhang Xing-hua.Neural network inverse control of variable frequency speed-regulating system in V/F mode[J].Proceedings of the CSEE,2005,25(7):109-114.
[3]吳振宇,趙亮,馮林.基于分數階PID 控制器的智能車控制[J].控制工程,2011,18(3):401-404.Wu Zhen-yu,Zhao Liang,Feng Lin.Control of intelligent vehicle based on fractional order PID[J].Control Engineering of China,2011,18(3):401-404.
[4]Lurie J.Three-parameter tunable tilt-integral-derivative controller[P].US Patent US5371670,1994.
[5]Oustaloup A,Melchior P.The great principles of CRONE control[C]∥System Engineering in the Service of Humans,Int Conf on Systems,Man and Cybernetics,Paris:Le Touquet,1993:118-129.
[6]汪紀鋒,李元凱.分數階P(ID)μ 控制器和分數階超前校正器的設計[J].電路與系統學報,2006,11(5):21-25.Wang Ji-feng,Li Yuan-kai.Design for two types of fractional-order controllers:P(ID)μ controller and lead-leg compensator[J].Journal of Circuits and Systems,2006,11(5):21-25.
[7]Podlubny I.Fractional-order systems and PID controllers[J].IEEE Transactions on Automation Control,1999,44(1):208-214.
[8]王瑞平,皮佑國.基于分數階PD 速度控制器的永磁同步電動機控制研究[J].中山大學學報:自然科學版,2013,52(3):34-39.Wang Rui-ping,Pi You-guo.Research on fractionalorder PD speed controller for PMSM[J].Acta Scientiarum Naturalium Universitatis Sunyatseni,2013,52(3):34-39.
[9]梁濤年,陳建軍.時滯系統分數階PIλDμ魯棒控制[J].振動、測試與診斷,2011,31(3):257-361.Liang Tao-nian,Chen Jian-jun.Fractional order PIλDμrobust control for time delay system[J].Journal of Vibration,Measurement &Diagnosis,2011,31(3):257-361.
[10]莊德軍,喻凡,林逸.基于分數階PIμ控制器的車輛方向控制[J].上海交通大學學報,2007,41(2):278-283.Zhuang De-jun,Yu Fan,Lin Yi.The vehicle directional control based on fractional order PIμcontroller[J].Journal of Shanghai Jiaotong University,2007,41(2):278-283.
[11]湯躍,張新鵬,黃志攀,等.離心泵變壓供水系統控制模型辨識的試驗研究[J].農業工程學報,2012,26(7):189-193.Tang Yue,Zhang Xin-peng,Huang Zhi-pan,et al.Experimental study on control model of centrifugal pomp variable-pressure water supply system[J].Transactions of the Chinese Society of Agricultural Engineering,2012,26(7):189-193.
[12]聶冰,趙慧敏,郭永香,等.交流電機調速系統的分數階PIλ控制[J].大連交通大學學報,2012,33(2):84-86.Nie Bing,Zhao Hui-min,Guo Yong-xiang,et al.Application of fractional order controller in speed adjustment system of AC motor[J].Journal of Dalian Jiaotong University,2012,33(2):84-86.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
流程工業(2022年3期)2022-06-23 09:41:08
煤氣與熱力(2021年3期)2021-06-09 06:16:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
中學科技(2014年11期)2014-12-25 07:38:53
