搬磚機器人控制方案的改進
2015-06-15 19:00:30鮑勝偉郭烈恩王官明
自動化儀表 2015年4期
關鍵詞:系統
鮑勝偉 郭烈恩 王官明
(南昌大學機電工程學院,江西 南昌 330031)
搬磚機器人控制方案的改進
鮑勝偉 郭烈恩 王官明
(南昌大學機電工程學院,江西 南昌 330031)
搬磚機器人大大提高了企業的生產效率。搬磚機器人采用計算轉矩控制,需要事先確保機械臂的所有參數和有效載荷等動力學模型的各個參數完全已知。機器人在投入使用之前難以調試,且忽略摩擦和擾動輸入的反饋線性控制在實際不確定性系統中不能長時間穩定工作。對某公司生產的搬磚機器人進行了研究,并采用改進的具有變結構補償的計算轉矩控制,使搬磚機器人具有前饋補償跟蹤系統。實際驗證表明,該控制方案能適應長時間穩定工作,為其他類似機器人控制方案的設計提供了參考。
搬磚機器人 機械臂 計算轉矩控制 動力學 跟蹤 補償
0 引言
隨著我國國民經濟的快速發展,房地產業正如火如荼地發展,中國磚瓦工業也發生了巨大變化。在國家產業政策的指導下,磚瓦行業從一個手工作坊式和半機械化生產發展到現在有人工控制和自動化的生產[1]。自動化技術已廣泛應用到社會的各個領域,其急劇地改變著人類的工作方式和生活方式。江西某公司生產的“搬磚機器人”代替原先的人工碼磚,降低了勞動成本,提高了生產效率。搬磚機器人的整個系統由機械系統和搬磚機器人的控制模塊兩部分組成。搬磚機械手采用計算轉矩控制。該控制方案依賴于所有機械臂的參數和有效載荷等動力學模型的各個參數完全已知。計算轉矩控制是忽略摩擦和擾動輸入的反饋線性控制,其不能準確知道動力學參數,導致在實際運用中經常不能夠長時間正常工作。為了解決這個問題,提出了具有變結構的計算轉矩控制。改進后的搬磚機器人采用具有自動補償的軌跡跟蹤控制系統,控制輸入信號能夠實現實時計算。
1 搬磚機器人工作原理
六自由度搬磚機器人的整個系統主要由機器人和安裝在機器人末端的專用機械手[2]組成。搬磚機器人的工作原理是利用編制好的控制程序,通過搬磚機械手夾取磚塊,根據磚塊方陣的要求決定機械手是否需要旋轉90°,然后機械臂旋轉,使得機械手爪到窯車上方,把磚塊放到窯車上,周而復始,直到碼完一臺窯車。整個動作過程中全部的機械運動(包括機器人的夾取、升降、旋轉)都是在控制系統的控制下自動進行[3]。
2 搬磚機器人運動控制
2.1 計算轉矩控制
機器人動力學的根本是研究關節輸入力矩與輸出的操作運動之間的關系。動力學分析是機器人控制、結構設計與驅動器選型的基礎[4]。對于搬磚機器人的運動控制,剛性機械臂的關節空間動力學模型可以由拉格朗日動力學方程簡便地表示出來。設機械臂有n個連桿,關節變量的(n×1)維向量s為:
s=[s1,s2,s3,...,sn]
(1)
忽略摩擦和擾動輸入,機器人機械臂的動力學模型可由拉格朗日方程[5]表示。

(2)
式中:s、v、a和τ分別表示關節的位置、速度、加速度和關節控制輸入的(n×1)維向量;n為機器人機構的運動自由度數;H(s)為(n×n)維的慣性矩陣;C(s,v)v為離心力和科里奧利力的(n×1)維向量;G(s)為重力的(n×1)維向量。
搬磚機械手運動控制被視為將線性化的反饋控制方案應用于非線性系統的計算轉矩控制類方案中。它的起點都是基于消除非線性項和解耦每個連桿動力學。在關節空間中的逆動力學控制有如下公式:

(3)
將式(3)代入式(2)中,會得到n個解耦的線性系統方程組,其中ω為一個待設計的輔助控制輸入變量。ω的典型選擇是:
ω=ad+Kv(vd-v)+Kp(sd-s)
(4)
式中:Kv、Kp為增益矩陣。
式(3)也被稱為計算轉矩控制[6]。它由一個內在非線性補償回路和一個有外生控制信號ω的外部回路組成。將這種控制方案應用于機器人機械臂的動力學模型,得到:
a=ω
(5)
需要注意的是,這種控制輸入將一個復雜的非線性控制器設計問題轉化成一個由n個子系統組成的線性系統設計問題。外部回路控制ω是式(4)中所示的PD反饋:
ω=ad+Kvvq+Kpsq
(6)
這種情況下,總的控制輸入表達式為:
τ=H(s)(ad+Kvvq+Kpsq)+C(s,v)v+G(s)
(7)
并且由此產生的線性誤差動力學方程為:
aq+Kvvq+Kpsq=0
(8)
根據線性系統理論,確定跟蹤誤差收斂到零。
2.2 計算轉矩控制的缺陷
同時摻入納米氧化鈣和納米氧化硅的膨潤土,由于納米氧化鈣形成的膠結結構限制了吸水膨脹,納米氧化硅無法進入小孔隙。因此,同時摻入兩者的膨潤土與僅摻入納米氧化鈣的膨潤土,在孔徑<0.2μm時,孔隙分布相同。在孔徑>0.2μm的孔隙中,納米氧化硅的楔入作用使得部分孔隙增大,所以同時摻入兩者的膨潤土存在孔徑>1μm的孔隙,但膠結結構的約束作用使得其大孔隙較僅摻入納米氧化硅的少而小。
計算轉矩控制把多輸入多輸出(multi-input multi-output,MIMO)高度耦合非線性系統轉換成十分簡單的解耦線性系統。需要注意的是,計算轉矩控制的反饋線性化方法完全依賴于系統的參數信息,并且得不到這些信息會引起錯誤的參數估計,導致誤差系統的閉環模型產生不匹配,系統魯棒性[7]較差。為了避免這樣的問題,非常有必要對以上搬磚機械手運動控制進行修改。改進后的運動控制方案采用具有變結構補償的計算轉矩控制,使得搬磚機械手能夠穩定地工作。
3 計算轉矩類控制
具有變結構補償的計算轉矩控制稱為計算轉矩類控制。計算轉矩類控制可以通過修正如下計算轉矩控制得到:

(9)
式中:“^”代表計算值。
式(9)說明了忽略摩擦和擾動輸入的精確反饋線性控制不能在實際的不確定性系統中實現。計算轉矩類控制方案的示意圖如圖1所示。
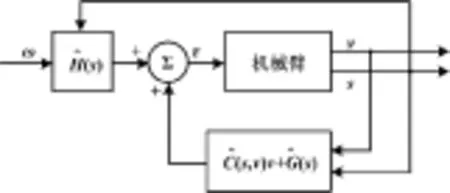
圖1 計算轉矩類控制示意圖
3.1 具有變結構補償的控制
由于機器人系統參數的不確定性,為實現軌跡跟蹤[8],需要在外回路中設計補償項。具有變結構補償的計算轉矩類控制方案的表達式如下。
ω=ad+Kvvq+Kpsq+Δω
(10)

PA+ATP=-Q
(12)
將式(11)和式(12)代入式(10)得到:
(13)
若選取:
(14)
(15)


可以看出,使用李雅普諾夫函數(如式(16)所示),可以使上式的跟蹤誤差收斂到零。
V=xTPx
(16)
3.2 計算轉矩類控制分析
由于Δω存在間斷點,運用計算轉矩類控制方案時,搬磚機械手會發生抖振現象,且控制中高頻分量能夠激發未建模的動力學作用(如關節柔性[9]),抖振現象經常是不可以避免的。為了避免抖振現象,采用變結構補償的方法。
(17)
式中:ε為一個用來作為邊界層的正常數。
根據這一修正,跟蹤誤差的收斂性可以被限定在一定的殘差集范圍內。當ε很小時,可以得到一個很小的殘差集范圍,以此消除機械手在工作過程中的抖振現象。采用具有變結構補償的計算轉矩類控制的搬磚機器人放寬了對機械臂控制參數和它的載荷的約束,并且可以實現目標系統的不確定性跟蹤。該方法具有控制簡單、降價、解耦等優點。
4 結束語
機器人在工業中得到了廣泛應用,推進了實現工業自動化的步伐。搬磚機器人大大提高了制磚行業生產效率并且降低了企業的人工成本。機器人技術研究和應用取得了突出的進展, 但仍面臨著巨大挑戰[10]。
對于搬磚機器人的運動控制,采用關節空間的計算轉矩控制,將多輸入多輸出的非線性機器人系統轉化成解耦的線性閉環系統。這種控制方案的實際運動需要確保動力學模型的各個參數完全已知,這使它在實際運用中經常難以調試并且不能夠長時間正常工作。改進后的具有變結構補償的計算轉矩類控制方案放寬了上述約束,且可以實現目標系統的不確定性跟蹤。此次改進設計可為類似的機器人控制的改進提供參考與借鑒。
[1] 許彥明.我國磚瓦機械行業發展現狀及前景[J].磚瓦世界,2009(2):5-8.
[2] 劉俊,高樂,范永威.搬磚機械手的動力分析及結構優化[J].制造業自動化,2011,33(8):10-20.
[3] 何長海.自動碼坯機、智能機械手、自動卸磚機在磚瓦生產線上的應用[J].磚瓦世界,2010(10):16-18.
[4] 于靖軍,劉辛軍,丁希侖,等.機器人機構學的數學基礎[M].北京:機械工業出版社,2009:362-378.
[5] 熊有倫.機器人技術基礎[M].武漢:華中科技大學出版社,2013:82-84.
[6] 彭文東,王永雄.一類基于計算轉矩的機器人控制方法性能分析[J].井岡山大學學報,2012,33(5):46-52.
[7] 吳曉光,趙杰,臧希喆,等.基于髖部質量的被動步行機器人穩定性和魯棒性[J].中南大學學報:自然科學版,2012,43(6):2157-2164.
[8] 袁雷華.SCARA機械手的RBF神經網絡自適應軌跡跟蹤控制[D].武漢:湖北工業大學,2014.
[9] 趙欣翔.考慮關節柔性的重載工業機器人結構優化研究[D].哈爾濱:哈爾濱工業大學,2013.
[10]譚民,王碩.機器人技術研究進展[J].自動化學報,2013,39(7):963-972.
Improvement of the Control Scheme for Brick-carrying Robot
Brick-carrying robots improve the production efficiency to a large extent for the enterprises. Because brick-carrying robot is adopting computed torque control, so all the parameters of mechanical arm and all the parameters of the dynamics model of payload shall be known in advance. It is difficult to debug the robot before put it into service, and the feedback linear control ignoring friction and disturbance input cannot operate steady for long period in practical uncertainty system. The brick-carrying robot manufactured by certain company is researched, by adopting the improved computed torque control with variable structure compensation; the brick-carrying robot may possess feed-forward compensation tracking system. The practical verification indicates that the proposed method can adapt long time stable operation; it provides reference for similar control scheme of robots.
Brick-carrying robot Mechanical arm Computed torque control Dynamics Tracking Compensation
鮑勝偉(1991-),男,現為南昌大學學校機械制造及其自動化專業在讀碩士研究生;主要從事特種加工的研究。
TP242+.2
A
10.16086/j.cnki.issn1000-0380.201504019
修改稿收到日期:2014-08-17。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32