吸氣式高超聲速飛行器控制研究綜述
2015-06-21 12:50:55王鵬飛時建明陳星陽楊育榮
航空兵器 2015年3期
王鵬飛,王 潔,時建明,陳星陽,楊育榮
(1.空軍工程大學防空反導學院,西安 710051;2.中國空空導彈研究院,河南洛陽 471009)
吸氣式高超聲速飛行器控制研究綜述
王鵬飛1,王 潔1,時建明1,陳星陽2,楊育榮2
(1.空軍工程大學防空反導學院,西安 710051;2.中國空空導彈研究院,河南洛陽 471009)
吸氣式高超聲速飛行器控制系統的任務是在飛行包線內通過發動機提供的推力改變飛行速度并利用氣動舵面偏轉調整飛行姿態,控制飛行器精確跟蹤制導指令。通過探討高超聲速飛行器的動力學特性,從系統建模和控制策略研究兩個方面對高超聲速飛行器的控制系統設計研究現狀進行了分析和闡述,所得結論可為相關研究提供借鑒與參考。
高超聲速飛行器;動力學建模;飛行控制
0 引 言
高超聲速飛行器是指能夠以大于5個馬赫數持續飛行的飛行器,分為無動力式滑翔飛行器和吸氣式動力飛行器。吸氣式動力飛行器是從周圍環境中獲取氧氣,依靠自身發動機提供飛行動力、控制舵調整飛行姿態,可實現高超聲速巡航與突防、空天往返的飛行器。具有遠程快速響應、大機動性、高突防概率和自由進入空間的潛在優勢,主要以美國的高超聲速飛行器試驗(Hyper-X)計劃為代表,如NASA的X-43A、美國空軍的X-51A試驗飛行器。
吸氣式高超聲速飛行器作為臨近空間高超聲速飛行器發展的重要研究內容,對國家安全和和平利用空間有重要的戰略意義和應用價值。
1 吸氣式高超聲速飛行器動力學特性
1.1 飛行環境復雜、飛行包線跨度大
吸氣式高超聲速飛行器飛行高度覆蓋了從大氣層到臨近空間近80 Km的廣闊空域,而飛行速度跨越了5個馬赫數到25個馬赫數的范圍,在如此廣闊而又復雜的環境中作高超聲速的機動飛行,吸氣式高超聲速飛行器動力學的非線性快時變特征異常明顯。當該類飛行器飛行馬赫數大于5以后,其表面的流場會出現一些明顯區別于亞聲速和超聲速飛行的物理現象,如薄的激波層、真實氣體效應和氣動熱效應,這些現象稱為高超聲速效應。高超聲速效應使得吸氣式高超聲速飛行器的氣動特性和氣熱特性復雜多變,會影響飛行器飛行性能、操縱性和穩定性。
1.2 外形結構、推進系統和空氣動力學之間交叉耦合
以X-43A和X-51A為代表的新一代高超聲速飛行器為減小飛行過程中的飛行阻力、降低氣動加熱、提高升阻比,廣泛采用輕質材料和大型薄壁結構設計,氣動外形為細長體、升力體布局、完全或部分乘波體布局,這使得吸氣式高超聲速飛行器動力學系統是氣動/推進/結構耦合的復雜系統,如圖1所示。
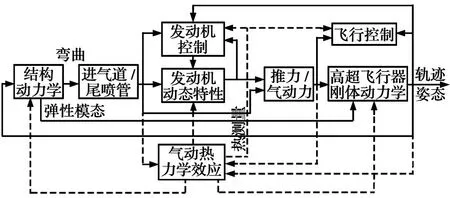
圖1 吸氣式高超聲速飛行器氣動/推進/結構耦合關系
1.3 高度不確定性
吸氣式高超聲速飛行器動力學的不確定性主要來源于三個方面:一是高超聲速氣流流動特征和吸氣式高超聲速飛行器動力學系統中的交叉耦合關系十分復雜,且由于尚未建立充足的風洞試驗和飛行測試數據庫,因此,與亞聲速和超聲速飛行器相比,吸氣式高超聲速飛行器的許多飛行特性還無法掌握,其關鍵氣動特性也很難預測;二是高超聲速飛行會經歷嚴重的不確定氣動加熱環境,由于表面材料的燒蝕而產生的飛行器結構變形和固有振動頻率變化將影響飛行器的結構動力學特性和穩定性;三是由于飛行環境復雜,吸氣式高超聲速飛行器飛行過程中往往會受到各種事先無法預知的大氣干擾,如湍流、陣風等,氣流干擾容易對飛行姿態造成擾動,使氣動舵操縱過程中發生瞬時飽和[1]。
2 吸氣式高超聲速飛行器控制研究
2.1 高超聲速飛行器動力學建模研究
如何建立描述吸氣式高超聲速飛行器特性的數學模型,是設計高效控制器的一個重要前提。目前,主要的建模方法包括以動力學建模為代表的常規建模方法、以模糊建模為代表的智能建模方法,以及以特征建模為代表的工程化建模方法[2]。吳宏鑫院士對特征建模方法有著系統深入的研究[3],羅熊對智能建模和特征建模相結合的建模方法也進行了進一步的研究工作[4]。雖然這兩種建模方法在傳統航天器控制領域有著成功的應用,但是在面向復雜的吸氣式高超聲速飛行器建模時還存在著模型參數辨識困難問題。一般而言,分析吸氣式高超聲速飛行器特殊構型設計下的動力學穩定性,設計適當控制律以獲得合適的性能,都離不開吸氣式高超聲速飛行器的飛行動力學建模過程。目前,已經研究過的動力學模型有 NASA Langley研究中心早期公布的風洞數據插值擬合模型[5]、Mirmirani給出的基于計算流體力學(CFD)的數值模型[6-7]、Chavez和Schmidt提出的氣動推進/氣動彈性一體化解析模型[8]。雖然學術界和工程領域都在尋求建立吸氣式高超聲速飛行器的六自由度模型[9],但是目前動力學建模工作主要還是在吸氣式高超聲速飛行器的縱向飛行平面內展開,這是出于兩點考慮[1]:一是吸氣式高超聲速飛行器對姿態變化敏感,應避免橫向的機動;二是吸氣式高超聲速飛行器的縱向動力學特性對于控制問題而言已經足夠復雜。NASA模型和Mirmirani模型的研究對象是六自由度的Winged-Cone構型高超聲速概念飛行器,該類型飛行器具有錐體外形和剛性結構,反映不出當前具有乘波體構型吸氣式高超聲速飛行器的動力學行為。后續的研究中,美國空軍研究實驗室的Bolender和Doman在Chavez和Schmidt模型基礎上完善了包含空氣動力學、推進系統和結構動力學的動力學模型[10-13]。在美國空軍研究辦公室資助下開展的吸氣式高超聲速飛行器飛行控制研究工作都采用了Bolender和Doman的模型[14-17],但是在氣動與結構之間的耦合方式、結構動力學特性近似等方面也存在一定的差異。
在高超聲速氣動力建模方面,有兩類氣動力的計算方法:一是基于計算流體力學的時域計算方法;二是基于工程近似計算方法。由于高超聲速氣動數據庫和計算流體力學軟件還不完善,目前多采用工程近似計算方法求解氣動力,此方面廣泛應用的理論包括牛頓碰撞理論[18-19]、斜激波理論[20]和Prandtl-Meyer膨脹波理論,以及活塞理論[21-22]。牛頓碰撞理論僅適合于馬赫數遠大于7情況下的氣動力近似計算,而對于吸氣式高超聲速飛行器的馬赫數范圍,該理論計算結果不夠準確。斜激波理論/膨脹波理論適合確定高超聲速飛行時飛行器表面激波位置和分布,但是依據該理論只能進行定常氣動力的計算。活塞理論在非定常氣動力近似計算方面應用較為廣泛,針對吸氣式高超聲速飛行器的非定常氣動效應,Oppenheimer研究了采用活塞理論計算吸氣式高超聲速飛行器表面的非定常氣動力的方法[23-24]。
在結構動力學建模方面,目前關于吸氣式高超聲速飛行器機身結構存在兩種假設:一是Bolender和Doman所采用的質心固定的兩根懸臂梁(Double Cantilever Beam)假設[10];二是 Bilimoria和Schmidt所采用的兩端無約束自由梁(Free-Free Beam)假設[25]。雖然第一種假設更符合對吸氣式高超聲速飛行外形的直觀感受,但是基于此假設推導出的彈性模態和俯仰力矩之間直接耦合的理論結果與實際飛行試驗觀測到的結果并不一致[26]。在第一種假設下,Bolender和Doman采用Lagrangian方法建立的剛體力學與結構力學強烈耦合動力學模型給控制器設計也帶來了不小的困難[15]。在后續的動力學建模與穩定性分析中[12-13],Bolender和Doman改用Williams關于結構動力學的假設模態建模方法[27],此時結構動力學與剛體動力學之間只通過氣動力進行耦合。這種耦合方式下的動力學模型也逐漸被用于控制器的設計與驗證[16-17]。
在推進系統建模方面,Chavez和Schmidt提出了簡化的一維超燃沖壓發動機模型[8],該模型至今仍被應用于吸氣式高超聲速飛行器的一體化解析建模中,是后續超燃沖壓發動機解析建模的基礎。Chavez和Schmidt的主要貢獻在于給出了超燃沖壓發動機尾噴管的壓強分布預測公式,從而大大方便了推力的計算。Torrez提出了包含預燃燒激波和分解效應的超燃沖壓發動機模型[28],雖然該模型清晰描述了燃燒室內的化學反應過程,但是不能為控制器設計提供清晰的輸入和輸出關系,且該模型是數值模型,不能進行快速解析計算。
由于吸氣式高超聲速飛行器未開展廣泛的大包線飛行試驗,缺乏關于該類型飛行器的完整氣動數據,因此上述研究都是從原理上進行建模,將所得的原理模型用于動力學穩定性分析,及檢驗基于特定理論所設計的控制器的有效性,進而輔助地面風洞模擬及高空飛行試驗。但是,從控制系統設計的角度建立簡單高效的系統模型,研究復雜飛行器具有的嚴重非線性、快時變及強耦合特性,目前還沒有突破性的研究成果。
2.2 控制策略研究
從控制的角度來看,通過原理模型給出的氣動力等作用力的解析表達式必然為控制量的復雜隱函數,難以直接進行反饋形式的控制器設計。建立面向控制的動力學模型需要將這些復雜的氣動力表示成控制量的仿射形式,有兩種可行的途徑:一是基于工作區域內的多個特征點建立線性化模型,再對各個特征點模型分別進行線性控制器設計,這體現了增益調度設計方法的思想;二是將氣動力和推力等作用力擬合成關于飛行狀態量和控制量的多項式形式,再進行非線性控制器設計。目前,吸氣式高超聲速飛行器的控制方法研究呈現大發展態勢,主要包括:基于H∞的特征結構配置方法、線性變參數控制方法、自適應控制方法、基于觀測器的輸出反饋控制方法、模型跟蹤控制方法等等,這些方法涉及線性控制、非線性控制和智能控制,涵蓋了經典控制理論、現代控制理論和智能控制理論。雖然這些方法從不同角度探索了高超聲速飛行器控制系統設計問題,但是都可以從上述兩個方面進行歸類。
針對線性化模型,Lohsoonthorn等人在模型不存在不確定性和外部干擾的情況下,采用基于H∞理論發展的Shapiro特征結構配置方法研究了長短周期解耦控制問題[29]。Gregory等人考慮了大氣干擾和輸入不確定性,采用直接H∞回路成形和DK迭代μ綜合方法等經典的H∞魯棒控制設計方法設計了三種控制器,通過仿真表明,μ最優控制器具有一定的魯棒性,而單純的H∞控制器不能滿足穩定性要求[30]。Marrison和Stengel基于線性二次型調節器控制結構并采用隨機魯棒分析與設計方法研究了魯棒控制綜合問題[31]。
針對非線性模型,許斌采用高增益狀態觀測器估計經連續求導線性化獲得的狀態量,并對變換后系統的集總不確定項采用一個神經網絡進行逼近[32]。張天翼等人在引入參考模型的基礎上,建立了一種具有非匹配特性的耦合控制模型。通過動態調節參數的方法,得到了一種魯棒自適應控制律。該算法保證在氣動參數攝動與干擾同時存在的情形下,滿足飛行器穩定飛行的要求[33]。王明昊等人對非線性動力學模型進行雅克比線性化處理并擬合得到LPV模型,離散化后存儲于一張量中,利用高階奇異值分解,得到有限個LTI多胞頂點系統。再對各頂點進行狀態反饋H∞控制器設計,通過引入松弛變量,在不同點使用不同的Lyapunov函數矩陣,以此降低控制器的保守性,得到依賴變參量進行增益在線調節的控制器[34]。
從應用的角度講,反饋控制系統的一個主要問題是由于執行機構的物理約束使得設計的控制律產生的控制信號不能實施,稱此問題為輸入受限問題或有限控制權問題。輸入受限問題是控制理論與方法走向工程應用過程中的一個很突出的問題,因為目前大量的控制方法針對的都是具有線性連續響應系統,即假設系統的控制輸入能夠一致處于有效的線性工作狀態,而實際系統中執行機構對控制指令的響應總是受到物理機制等方面的約束。因此,從理論分析中所得出的結論在實際系統應用中可能并不成立。通過前面分析可知,機身和推進系統耦合、控制和結構耦合帶來的穩定性要求和約束要求,使得吸氣式高超聲速飛行器控制系統設計過程中,尤其需要重視輸入受限問題。文獻[1]將輸入受限問題和不確定性問題一同歸入線性變參數系統魯棒性框架內,通過設計魯棒控制器加以解決。以上研究只局限于在線性化模型中解決執行機構飽和問題,對于狀態量約束問題還需進一步研究。針對高超聲速飛行器的非線性模型,文獻[35]采用模型預測方法研究了狀態變量和控制變量幅值約束時的控制問題;文獻[36]將飽和視為系統的不確定項,采用神經網絡進行補償,提出了輸入受限條件下的自適應滑模控制方法。但是,這些控制方法在具有廣泛意義的輸入受限問題上還需要進行更深入的研究。
3 結 論
綜上所述吸氣式高超聲速飛行器控制方法研究涵蓋面廣,取得了很多的新成果,但還需要在以下幾個方面開展進一步的研究工作:
(1)原理建模的合理簡化問題
原理模型較為真實全面地反映了吸氣式高超聲速飛行器縱向運動的特點,但是原理模型具有非最小相位行為,且模型中各子系統中的狀態量是相互耦合相互影響的,故一般在設計控制系統時都要對原理模型進行適當的簡化處理。目前,由于僅對高超聲速飛行器進行了有限的飛行試驗,使得該類型飛行器的許多動力學特性還未被完全掌握。因此,現有研究采用的假設和簡化模型并不能完全反映出高超聲速飛行器的動力學特性,甚至有些假設并不完全符合試驗觀測到的結果。在下一步的研究過程中,還需深入研究高超聲速飛行器的氣動/推進/結構動力學交叉耦合機理,對原理模型進行更為合理的簡化和近似。此外,從控制系統設計角度討論研究高超聲速飛行器具有的嚴重非線性及強耦合特性,并建立簡單高效的系統模型等問題也有待進一步研究。
(2)自適應控制系統的輸入受限問題
一般而言,自適應控制中的跟蹤誤差主要由參數估計誤差產生。而當考慮高超聲速飛行器的輸入受限問題時,跟蹤誤差則非直接由估計誤差引起,傳統的自適應方法難以保證閉環系統穩定,從而出現動態響應特性惡化等問題。因此,近些年來,輸入受限問題逐漸得到重視,但研究還并不十分充分。一些研究雖然也將其研究的內容稱為輸入受限問題,但實際上僅僅考慮了飽和約束,且將約束作為一種不確定性加以考慮,未從理論上進行深入分析。所以,在輸入受限的條件下如何保證控制器的魯棒性以及自適應控制的穩定性和有效性,仍是有待解決的關鍵問題。
(3)控制系統全反饋的實現問題
目前,相關控制研究大都建立在全狀態反饋的基礎上,即假設高超聲速飛行器動力學系統中的所有狀態變量都是可以獲得的。但實際的工程實踐中,并非所有狀態量都可以方便測量。例如嚴重的氣動加熱使得傳統的物理測量設備對迎角和航跡角等小角度值的測量十分困難。因此,考慮動力學系統狀態量的不便測量或不完全可測量的因素,研究全狀態反饋的實現方法對控制方法走向工程應用有著重要的意義。
總之,高超聲速飛行器的強非線性和高度的不確定性,使得飛行控制系統設計十分困難。傳統的增益調度法和依賴于精確數學模型的控制器設計方法已經很難適應高超聲速飛行器的控制系統設計要求。要適應飛行器大范圍機動飛行的性能要求,控制系統就必須具備高可靠性、強魯棒性以及強自適應性。因此,在今后較長一段時間內,高超聲速飛行器的控制問題將是航空航天領域持續關注的熱點。
[1]葛東明.臨近空間高超聲速飛行器魯棒變增益控制[D].哈爾濱:哈爾濱工業大學,2011.
[2]Lian Baohua,Bang H,Hurtado JE.Adaptive BacKstepping Control Based Autopilot Design for Reentry Vehicle[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit,Providence,Rhode Island:AIAA,2004-5328.
[3]吳宏鑫,胡軍,謝永春.基于特征模型的智能自適應控制[M].北京:中國科學技術出版社,2009.
[4]羅熊,孫增圻,顏時雨.面向復雜航天器控制應用的模糊動態特征建模與控制[J].空間控制技術與應用, 2010,36(3):1-13.
[5]Shaughnessy JD,PincKney SZ,Mcminn JD,etal.Hypersonic Vehicle Simulation Model:Winged-Cone Configuration[R].NASA-TM-102610,Hampton,Virginia:NASA,1990.
[6]Keshmiri S,Colgren R,Mirmirani M.Six-DOFModeling and Simulation of a Generic Hypersonic Vehicle for Control and Navigation Purposes[C]∥AIAA Guidance, Navigation,and Control Conference and Exhibit,Keystone,Colorado,AIAA 2006-6694,2006.
[7]ClarKA,Wu C,Mirmirani M,et al.Development of an Airframe-Propulsion Integrated Generic Hypersonic Vehicle Model[C]∥44th AIAA Aerospace Sciences Meeting and Exhibit,Reno,Nevada,AIAA 2006-218,2006.
[8]Chavez FR,SchmidtD K.An Integrated Analytical Aeropropulsive/Aeroelastic for Dynamic Analysis of Hypersonic Vehicles[C]∥AIAA Atmospheric Flight Mechanics Conference,Hilton Head Island,South Carolina,1992:551 -563.
[9]ShaKiba M,Serrani A.Control Oriented Modeling of 6-DOF Hypersonic Vehicle Dynamics[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit, Portland,Oregon,AIAA 2011-6227,2011.
[10]Bolender M A,Doman D B.A Non-Linear Model for the Longitudinal Dynamics of a Hypersonic Air-Breathing Vehicle[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit,San Francisco,California,AIAA 2005-6255,2005.
[11]Bolender M A,Doman D B.Nonlinear Longitudinal Dynamical Model of an Air-Breathing Hypersonic Vehicle[J].Journal of Spacecraft and RocKets,2007,44(2):374-387.
[12]Bolender M A,Oppenheimer MW,Doman D B.Effects of Unsteady and Viscous Aerodynamics on the Dynamics of a Flexible Air-Breathing Hypersonic Vehicle[C]∥AIAA Atmospheric FlightMechanics Conference and Exhibit,Hilton Head,South Carolina,AIAA 2007-6397, 2007.
[13]Bolender M A.An Overview on Dynamics and Controls Modelling of Hypersonic Vehicles[C]∥IEEE American Control Conference,St.Louis,Missouri,2009:2507-2512.
[14]Groves K.Modelling,Simulation,and Control Design of an Air-Breathing Hypersonic Vehicle[D].Ohio:The Ohio State University,2005.
[15]ParKer JT,Serrani A,YurKovich S,et al.Control-O-riented Modeling of an Air-Breathing Hypersonic Vehicle[J].Journal of Guidance,Control,and Dynamics, 2007,30(3):856-869.
[16]Sigthorsson D O.Control-Oriented Modeling and Output FeedbacKControl of Hypersonic Air-Breathing Vehicles[D].Ohio:The Ohio State University,2008.
[17]Fiorentini L.Nonlinear Adaptive Controller Design for Air-Breathing Hypersonic Vehicles[D].Ohio:The O-hio State University,2010.
[18]Morgan H G,Runyan H L,HucKel V.Theoretical Considerations of Flutter at High Mach Numbers[J].Journal of the Aerospace Sciences,1958,25(6):371-381.
[19]Yates Jr E C,Bennett R M.Analysis of Supersonic-Hypersonic Flutter of Lifting Surfaces at Angle of AttacK[C]∥12th Structures,Structural Dynamics and Materials Conference,Anaheim,California,AIAA 1971-327,1971.
[20]Zartarian G,Hsu P T,Ashley H.Dynamic Airloads and Aeroelastic Problems at Entry Mach Numbers[J].Journal of the Aerospace Sciences,1961,28(3):209-222.
[21]Lighthill M J.Oscillating Airfoils at High Mach Numbers[J].Journal of the Aeronautical Sciences,1953,20(6):402-406.
[22]Ashley H,Zartarian G.Piston Theory:A New Aerodynamic Tool for the Aeroelastician[J].Journal of the Aeronautical Sciences,1956,23(12):1109-1118.
[23]Oppenheimer M W,Doman D B.A Hypersonic Vehicle Model Developed with Piston Theory[C]∥Atmospheric Flight Mechanics Conference and Exhibit,Keystone, Colorado,AIAA 2006-6637,2006.
[24]Oppenheimer M W,SKujins T,Bolender M A,et al.A Flexible Hypersonic Vehicle Model Developed with Piston Theory[C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit,Hilton Head,South Carolina,AIAA 2007-6396,2007.
[25]Bilimoria K D,Schmidt D K.Integrated Development of the Equations ofMotion for Elastic Hypersonic Flight Vehicles[J].JournalofGuidance,Control,and Dynamics, 1995,18(1):73-81.
[26]Somanath A.Adaptive Control of Hypersonic Vehicles in the Presence of Actuation Uncertainties[D].Massachusetts:Massachusetts Institute of Technology,2010.
[27]Williams T,Bolender M A,Doman D B,et al.An Aerothermal Flexible Mode Analysis of a Hypersonic Vehicle[C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit,Keystone,Colorado,AIAA 2006-6647,2006.
[28]Torrez SM,Scholten N A,MicKa D J,etal.A Scramjet Engine Model Including Effects of Precombustion ShocKs and Dissociation[C]∥44th AIAA/ASME/SAE/ASAEE Joint Propulsion Conference and Exhibit,Hartford,Connecticut,AIAA 2008-4619,2008.
[29]Lohsoonthorn P,JoncKheere E,Dalzell S.Eigenstructure vs Constrainted H∞Design for Hypersonic Winged-cone[J].Journal of Guidance,Control,and Dynamics, 2001,24(4):648-658.
[30]Gregory IM,Chowdhry R S,Mcminn JD,et al.Hypersonic Vehicle Control Law Development Using H∞andμ -Synthesis[R].NASA-TM-107689,Hampton,Virginia,NASA,1992.
[31]Marrison C I,Stengel R F.Design of Robust Control Systems for a Hypersonic Aircraft[J].Journal of Guidance, Control,and Dynamics,1998,21(1):58-63.
[32]Xu Bin,Gao Daoxiang,Wang Shixing.Adaptive Neural Control Based on HGO for Hypersonic Flight Vehicles[J].Science China:Information Science,2011,54 (3):511-520.
[33]張天翼,周軍,郭建國.高超聲速飛行器魯棒自適應控制律設計[J].宇航學報,2013,34(3):384-389.[34]王明昊,劉剛,趙鵬濤,等.高超聲速飛行器的LPV變增益狀態反饋H∞控制[J].宇航學報,2013,34(4):488-496.
[35]Vaddi SS,Sengupta P.Controller Design for Hypersonic Vehicles Accommodating Nonlinear State and Control Constraints[C]∥AIAA Guidance,Navigation,and Control Conference,Chicago,Illinois,AIAA 2009-6286,2009.
[36]李靜,左斌,段洣毅,等.輸入受限的吸氣式高超聲速飛行器自適應Terminal滑模控制[J].航空學報, 2012,33(2):220-233.
Research Progress on Control System of Air-Breathing Hypersonic Flight Vehicles
Wang Pengfei1,Wang Jie1,Shi Jianming1,Chen Xingyang2,Yang Yurong2
(1.The Air Defense and Antimissile Institute,Air Force Engineering University,Xi'an 710051,China;2.China Airborne Missile Academy,Luoyang 471009,China)
The control system function of air-breathing hypersonic flight vehicles is thatmaKing the flight vehicles tracK the command guidance accurately by changing the velocity through engine thrust and regulating flight attitude with deflection of rudder surface in full flight envelop.This paper discusses the dynamic characteristics of flight vehicles,and analyzes the control system development of air-breathing hypersonic flight vehicleswith modeling and control law,which can provide a reference for the interrelated study.
air-breathing hypersonic flight vehicles;dynamicsmodeling;flight control
V249.1
A
1673-5048(2015)03-0003-05
2014-12-10
航空科學基金資助項目(20120196006)
王鵬飛(1988-),男,河南開封人,博士研究生,主要從事飛行器控制技術研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56