基于多傳感器的列車空轉及滑行檢測與校正方法研究
2015-06-21 10:50:36王長林
城市軌道交通研究 2015年1期
關鍵詞:檢測
蔡 煊 王長林 林 穎
(1.西南交通大學牽引動力國家重點實驗室,610031,成都;2.西南交通大學信息科學與技術學院,610031,成都∥第一作者,博士研究生)
測速定位子系統是車載列車自動防護(ATP)系統的重要組成部分。車載ATP一方面根據測速定位系統提供的當前列車速度和位置信息確定下一步應該采取的動作,另一方面也利用相關參數檢驗系統控制的結果是否滿足要求[1-2],因此,測速定位系統提供的列車速度和位置信息的精度直接影響列車的運行安全。
輪軸速度傳感器是目前廣泛應用于列車測速定位系統的測速測距設備,但由于其與車輪相連,直接受到車輪影響,容易產生誤差。誤差來源主要包括脈沖計數誤差(車輪空轉、滑行等造成)和車輪磨損導致輪徑減小兩個方面[3]。列車在運行過程中不可避免會出現空轉/滑行,導致輪軸傳感器測速定位精度降低。如何降低空轉/滑行對測速定位的影響,是基于輪軸傳感器的列車定位方法必須要解決的關鍵問題[1-2]。
隨著列車運行控制技術的發展,新的趨勢是增強列車的自主控制能力,在減少或完全不依賴軌旁設備的情況下,由列車本身完成定位參數測量并能保證列車運行安全[4-5]。為了增強車載定位系統的可靠性和自主定位能力,引入其它類型的傳感器構成列車組合定位系統,是實現列車高精度定位的有效方法。在列車組合定位系統中,可利用輔助傳感器提供的冗余定位信息對輪軸傳感器的測量參數進行實時修正,從而完成空轉/滑行的檢測和誤差校正。
本文以輪軸速度傳感器、多普勒雷達、加速度計構成列車組合定位系統,結合加(減)速度、速度差和滑行率等三種檢測方法對列車是否發生空轉/滑行進行檢測,同時建立列車的正常狀態、空轉狀態、滑行狀態、不可信狀態,以及狀態之間轉換的數學模型,對列車發生空轉/滑行后的速度和走行距離誤差進行校正。
1 傳感器原理及誤差特性分析
1.1 輪軸速度傳感器
目前常用的輪軸速度傳感器一般屬于霍爾型脈沖傳感器,本文采用車載HS221G1A型脈沖速度傳感器,其測速范圍為0~20 kHz,模數為2.5,齒數為72。列車速度和走行距離計算公式為:

式中:
N——車輪每轉一圈傳感器所發出的脈沖個數;
D——列車輪徑;
Δn——本周期脈沖測量值;
T——測速周期。
輪軸傳感器測速測距精度高,缺點是一旦列車出現空轉/滑行,車輪的轉速無法正確反映列車的實際運行速度,測速測距會出現較大的誤差,且定位誤差隨著時間累積。因此,當列車未發生空轉/滑行時,可以輪軸速度傳感器的測量值作為列車速度計算的依據,當列車發生空轉/滑行時,輪軸傳感器測速值無法正確反映列車的真實運行速度。多普勒雷達和加速度計測速精度相對偏低,但不受輪對空轉/滑行的影響,可輔助輪軸傳感器完成空轉/滑行檢測,并為其空轉/滑行時產生的脈沖計數誤差提供補償和校正。
1.2 多普勒雷達
雷達測速基于多普勒頻移效應原理,將車載測速雷達安裝在機車車底,向軌面發射電磁波(與地平面成θ角),通過對回波信號的接收處理,計算得到列車的運行速度,進而積分求得列車走行距離。本文采用車載DRS05a型雷達速度傳感器。其響應時間為10 ms,測速范圍為0.2~600 km/h。測速計算公式為:

式中:
fr——多普勒頻移量,Hz;
λ——雷達發射波波長,m;
θ——雷達視線與地面夾角,(°)。
多普勒雷達測速不受輪對空轉/滑行的影響,誤差來源主要是雷達安裝角度誤差和列車振動所造成的測速誤差。雷達和輪軸傳感器在不同的速度段具有很好的互補性:低速段輪軸傳感器精度高,而雷達由于多普勒效應不明顯精度偏低;高速段雷達精度高,而輪軸傳感器由于列車空轉/滑行較低速時更加頻繁誤差較大[1]。
1.3 加速度計
加速度計是將加速度這一物理信號轉變成便于測量的電信號的測試儀器。本文采用Jewell公司的LCG-100系加速度傳感器。其測速范圍為±0.05g、±2g、±5g,靈敏度為(10±0.05)V/g、(2.5±0.012 5)V/g、(1±0.005)V/g,零點輸出為0.1g。其中g為重力加速度。加速度計測速計算公式為:

式中:
a——加速度計的列車加速度測量值;
Δt——測速周期;
θ——加速度計與地面的水平夾角。
加速度計測速直接測量列車運行方向的加速度分量,同樣不受輪對空轉/滑行的影響。
1.4 列車組合定位系統
上述三種傳感器誤差來源各不相同,可以有效進行優勢互補。列車組合定位系統由三種傳感器同時進行列車運動狀態參數測量,其硬件結構平臺如圖1所示。其中測速板實現對各個傳感器信息的同步采集并完成傳感器的工作狀態檢測。

圖1 列車組合定位硬件平臺
2 空轉/滑行檢測與誤差校正模型
2.1 空轉/滑行檢測方法
目前比較常用的空轉/滑行檢測方法有加(減)速度檢測法、速度差檢測法和滑行率檢測法[6]。三種方法中,加(減)速度檢測法的檢測靈敏度較高,因此在進行空轉/滑行檢測時,以加(減)速度檢測法為主,速度差和滑行率檢測法為輔,三種方法一起使用。
2.1.1 加(減)速度檢測法
比較現在列車速度和t時刻前列車速度,若其差(加速度)超過設定加速度β時,判斷為出現空轉現象(見圖2)。系統假定空轉檢測中列車以加速度α加速運行,并進行列車速度和走行距離計算。當來自輪軸速度傳感器的列車計算速度低于校正速度時,結束空轉校正。

圖2 空轉校正示意圖
比較現在列車速度和t時刻前列車速度,其差(減速度)超過設定值β時,判斷為出現滑動現象(見圖3)。系統假定滑行檢測中列車以減速度α減速運行,并進行速度計算。列車走行距離按保持滑動出現時的列車速度進行運算。當輪軸速度傳感器的列車計算速度超過校正速度時,結束滑動校正。

圖3 滑行校正示意圖
2.1.2 速度差檢測法
速度差檢測是以同一輛車內4個軸的速度和牽引(制動)指令發出后以一定加(減)速度加速(減速)的假想軸速度(也稱第5軸速度)中速度最低(高)的軸為基準,當某車輪的輪周速度比基準軸的速度高(低)某一設定值Δv時,就判斷車輪發生了空轉(滑行)[6]。
2.1.3 滑行率檢測法
滑行率檢測法根據列車行駛速度與脈沖速度之間的差值來判斷列車是否出現空轉/滑行。滑行率λ的定義為[6]:

式中:
vz——動輪圓周速度;
vj——列車行駛速度。
由式(5)可以看出,輪對做理論上的純滾動和完全滑行時的λ值分別為0和100%。由于輪軌間實際上處于一種“黏著”狀態,列車實際運行時的λ值應介于二者之間。
2.2 傳感器數據濾波修正模型
當列車發生空轉/滑行時,傳感器數據較正常情況有很大變化,為保證計算數據的平滑和穩定性,防止噪聲導致模型誤差增大,需要對輪軸傳感器和輔助傳感器的計算數據進行濾波修正。本文采用X公司的數據濾波降噪工程處理方法。
2.2.1 輪軸速度傳感器計算數據濾波修正
對輪軸速度傳感器的測速值修正如下:

式中:
p——低通濾波參數,p=12;
vwheel(i)——本周期根據輪軸傳感器計算的列車速度,m/s;
vtrain(i-1)——前一周期列車的運行速度,m/s。
根據式(6),結合上一周期列車速度,可得根據輪軸傳感器計算的本周期列車加速度為:

式中:
T——測速周期,s。
2.2.2 加速度計計算數據濾波修正
加速度傳感器在測量列車加速度時存在誤差,需要對其進行濾波,保證其計算的加速度值平滑和穩定。其濾波公式為:

式中:
aacc_adjust(i)—— 本周期由加速度傳感器得到的列車加速度,m/s2;
atrain(i-1)——上一周期列車加速度,m/s2;
p——低通濾波參數,p=7.5。
加速度計測量的加速度值是水平運動方向的加速度,當列車處于坡道環境時,需要根據坡度對其進行換算。加速度換算公式如下:

式中:
j——本周期加速度傳感器安裝位置的坡度,‰;
aacc(i)——加速度傳感器測量的本周期列車加速度。
將式(9)代入式(8),根據上一周期列車的速度和本周期加速度傳感器計算的列車加速度,可得根據加速度傳感器計算的本周期列車速度vacc_train(i)為:
式中:
vtrain(i-1)——上一周期列車速度,m/s;
atrain(i-1)——上一周期列車加速度,m/s2;
T——測速周期,s。
2.2.3 多普勒雷達計算數據濾波修正
對雷達的測速值修正如下:

式中:
vtrain(i-1)——上一周期列車速度,m/s;
vrad(i)——本周期雷達計算的列車速度,m/s;
p——低通濾波參數,p=7.5。
根據雷達測速原理可知,雷達計算的速度值不受線路坡道情況的影響,因此修正后的雷達計算速度值即為此時列車的速度值,vrad_train(i)=vtrain(i)。
2.3 基于多傳感器的空轉/滑行檢測模型
為了進一步提高車載定位系統的可靠性以及空轉/滑行檢測和誤差補償的精度,本文通過分析比較不同傳感器得到的列車運動狀態數據,在空轉/滑行檢測方法原理基礎上,結合所采用的多傳感器列車定位方法,建立空轉/滑行檢測數學模型。
2.3.1 輪軸傳感器和加速度計的加速度差值計算
對輪軸傳感器和加速度計的加速度計算值進行比較,利用加(減)速度檢測法檢測列車是否發生空轉/滑行。系統采用低通濾波的方式計算輪軸傳感器和加速度計的計算加速度差值。計算公式如下:

式中:
adif(i-1)——上一周期兩個傳感器計算的加速度差值,m/s2;
p——低通濾波參數,p=2。
2.3.2 輪軸傳感器和雷達的速度差值計算
對輪軸傳感器和雷達的速度計算值進行比較,利用速度差檢測列車是否發生空轉/滑行。系統采用低通濾波的方式對輪軸傳感器和雷達的速度差值進行計算。計算式為:

2.3.3 列車滑行率計算
列車滑行率計算式為:

設定列車空轉時滑行率臨界檢測值為λidling,滑行時滑行率臨界檢測值為λsliding,當λidling<λ(i)<λsliding時,判定列車未發生空轉/滑行;當λ(i)≤λidling時判定列車發生空轉;當λ(i)≥λsliding時,判定列車發生滑行。
2.4 列車狀態轉換模型
為了準確檢測列車是否發生空轉/滑行并對誤差進行校正和補償,建立列車的正常狀態、空轉狀態、滑行狀態、不可信狀態等四種運行狀態以及狀態之間轉換的數學模型。
設測速周期為T,每個測速周期計算得到的速度差為vdif(i),加 (減 )速度差為adif(i),滑行率為λ(i)。設定滑行減速度臨界檢測值為asliding,空轉加速度臨界檢測值為aidling,加(減)速度差臨界檢測值為aLIMIT,速度差臨界檢測值為vLIMIT。
(1)正常狀態判斷條件:若加(減)速度、速度差和滑行率等三種檢測模型均未檢測出列車發生空轉/滑行,判定此時列車的狀態為正常狀態。即:

(2)空轉狀態判斷條件:若加(減)速度檢測模型檢測出列車發生空轉,或速度差和滑行率檢測模型同時檢測出空轉時,判定列車狀態為空轉狀態。即:

(3)滑行狀態判斷條件:若加(減)速度檢測模型檢測出列車發生滑行,或速度差和滑行率檢測模型同時檢測出滑行時,判定列車狀態為滑行狀態。即:

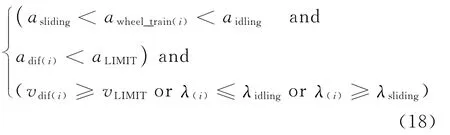
(4)不可信狀態判斷條件:若加(減)速度檢測模型判斷列車狀態正常,速度差和滑行率檢測模型其中之一檢測出發生空轉/滑行,判定此時列車的狀態為不可信狀態。即:
根據列車正常狀態、空轉狀態、滑行狀態及不可信狀態的判斷條件,可得4個狀態之間的轉換圖,如圖4所示。
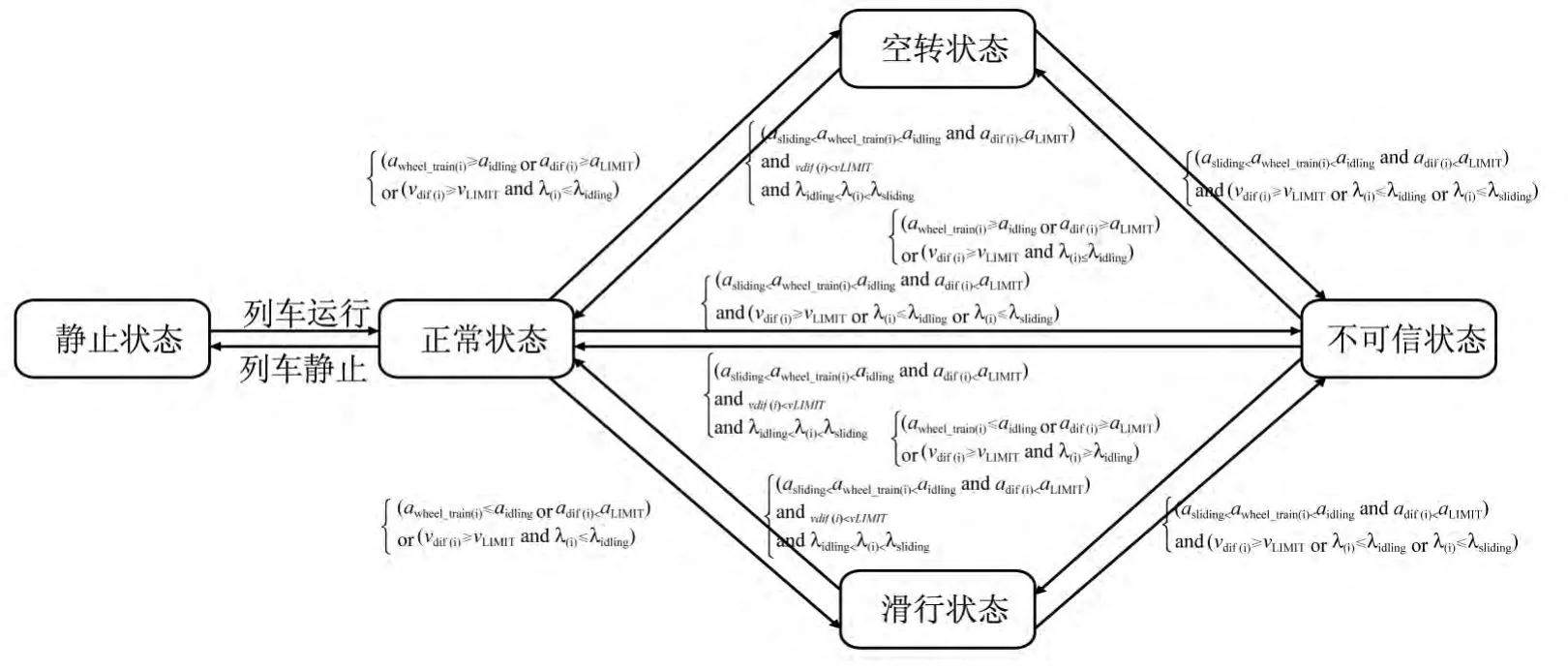
圖4 列車狀態轉換示意圖
如圖4描述,列車初始處于靜止狀態,未發生空轉/滑行;當列車開始運行后,就進入了正常、空轉、滑行等狀態的判斷流程。
2.5 誤差校正計算模型
當列車發生空轉/滑行時,車載ATP根據上一周期的列車運行速度及最不利情況下加速度計(或雷達)的測量數據,計算列車本周期的運行速度和走行距離:

式中:
aacceleration_resolution_error——加速度計分辨率誤 差 造成的誤差;
aacceleration_error——加速度計測量誤差造成的誤差;
agradient_error——坡道換算造成的誤差。
3 仿真驗證
3.1 仿真環境
為了驗證模型的有效性,以城市軌道交通B型車為仿真原型車,建立列車運動模型,通過模擬產生列車運行數據。仿真測試平臺結構如圖5所示。該平臺由2×2oo2的車載ATP、雙機熱備的車載ATO(列車自動運行)、車輛動力學模型仿真軟件、輪軸傳感器、測速雷達、加速度計、區域控制器仿真軟件、ATR(Automatic Train Regulation)仿真軟件和人機交互界面DMI(Driver Machine Interface)組成。
3.2 仿真結果
采用輪軸傳感器、多普勒雷達及加速度傳感器作為速度信號的采集輸入。系統平臺的信號采集周期為100 ms,采集周期誤差為±5 ms,列車輪徑值為856 mm,輪徑測量誤差為±2 mm。根據上述參數,在C++環境下對模型進行仿真,仿真結果如圖6所示。

圖5 仿真測試平臺
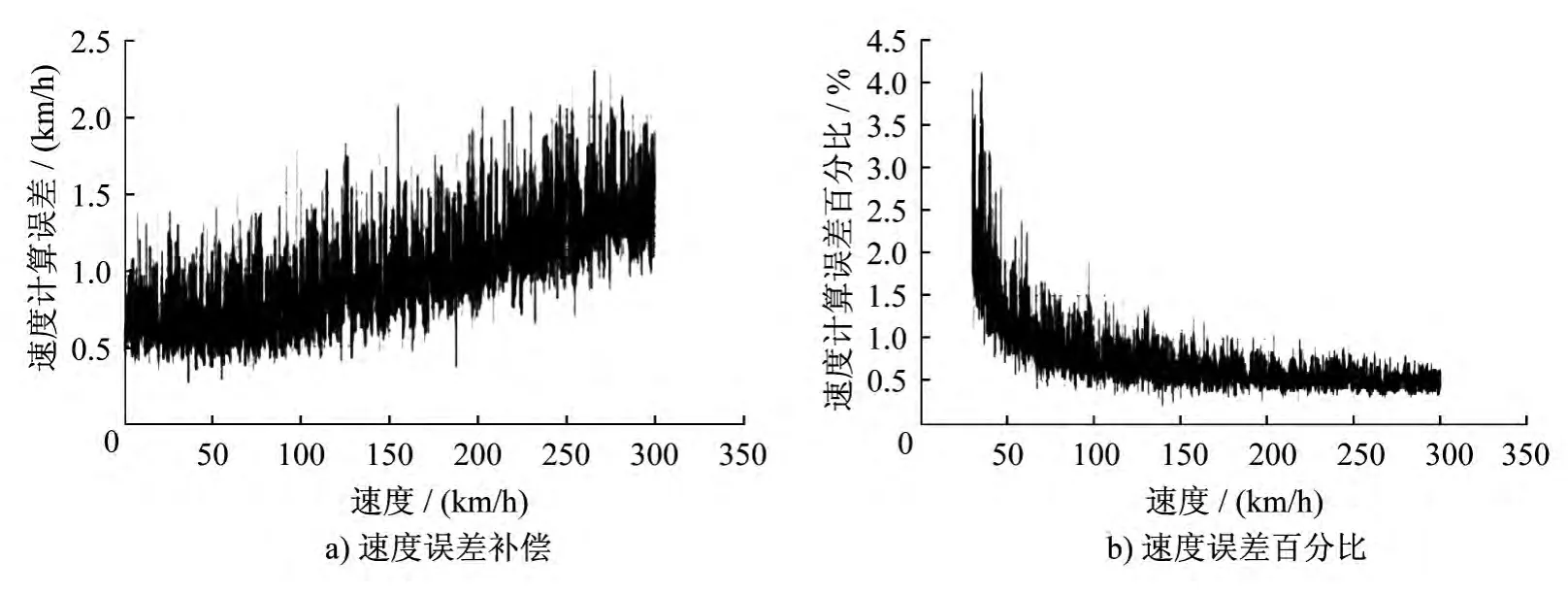
圖6 測速誤差仿真結果
從圖6a)可以看出,在列車發生空轉/滑行時,本文設計的空轉/滑行檢測與校正模型對測速的誤差補償總體上隨著速度的增大而增大,且測速誤差小于3 km/h,達到了IEEE 1474.1規范對車載ATP測速精度的要求[7]。從圖6b)來看,隨著速度的增大,誤差的百分比逐漸變小,能夠滿足與傳感器特性具有一致性的要求。
4 結語
針對輪軸速度傳感器的測速定位精度隨著輪對的空轉/滑行逐漸降低的問題,采用輪軸傳感器/多普勒雷達/加速度計構成列車組合定位系統,通過加(減)速度檢測、速度差檢測和滑行率檢測等三種檢測方法,實現對列車空轉/滑行的檢測。同時,建立列車正常、空轉、滑行、不可信等四種運行狀態以及狀態之間轉換的數學模型,對列車發生空轉/滑行后的速度和走行距離誤差進行計算補償。仿真結果表明,在發生空轉/滑行的情況下,本文設計的空轉/滑行誤差校正模型的測速誤差小于3 km/h,滿足車載ATP系統的精度要求,達到了預期的目的。
[1]張振興.城市軌道交通中的列車定位方法研究[D].北京:北京交通大學,2008.
[2]周達天.基于多傳感器信息融合的列車定位方法研究[D].北京:北京交通大學,2007.
[3]喬超,唐慧佳.列車里程計定位方法的研究[J].蘭州鐵道學院學報,2003,22(3):116.
[4]PETR E,ROMAN M,LIBOR P.Train locator using inertial sensors and odometer[C]∥IEEE Intelligent Vehicles Symposium.Parma:IEEE,2004:860.
[5]ANGELO G,LIVIO M,LORENA M,et al.The rune project:design and demonstration of a GPS/EGNOS-based railway user navigation equipment[C]∥ION GPS/GNSS,2003:225.
[6]彭俊彬.動車組牽引與制動[M].北京:中國鐵道出版社,2007.
[7]Rail Transit Vehicle Interface Standards Committee of the IEEE Vehicular Technology Society.IEEE 1474.1TM IEEE Standard for Communication-based Train Control (CBTC)Performance and Functional Requirements[S].
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48