基于模糊算法垂直泊車轉向控制策略的研究
2015-06-23 16:22:30王友楠方祖華徐宏兵
上海理工大學學報 2015年2期
關鍵詞:方向
王友楠, 方祖華, 孫 霙, 王 康, 徐宏兵
(上海師范大學信息與機電工程學院,上海 200234)
基于模糊算法垂直泊車轉向控制策略的研究
王友楠, 方祖華, 孫 霙, 王 康, 徐宏兵
(上海師范大學信息與機電工程學院,上海 200234)
為提高自動泊車的精度和安全性,分析了垂直泊車的運動特性,以車輛的初始位置及泊車過程中的轉向角控制為關鍵參數,建立了自動垂直泊車的運動模型.在Simulink環境中建立了基于模糊算法的垂直泊車轉向控制仿真模型,生成了模糊規則,分析了車輛初始位置、初始角度、初始運動速度對車輛運動軌跡的影響.仿真結果顯示,改變初始坐標及初始角度都會影響自動垂直泊車入庫效果,確定了一次性順利入庫的最小初始位置,該數值可用來設計最緊湊停車庫.該模糊算法控制靈敏且無超調.
自動垂直泊車;控制策略;模糊算法
自動泊車是通過探測車輛周圍環境信息來找到合適的泊車位,從而控制車輛的轉向和速度,使得車輛能夠自主駛入泊車位.常見的自動泊車方式有平行泊車和垂直泊車,現多采用路徑規劃和基于經驗控制算法(即模糊邏輯或神經網絡)這兩種方式來研究泊車.Jamil[1]設計出一種泊車輔助器,可幫助駕駛員方便安全地泊車,但在實現泊車的全自動方面有待改進.文獻[2-3]分別基于模糊邏輯控制進行泊車系統研究,邏輯控制依賴于人的操作知識,因此需要大量的泊車實驗.劉鈺等[4]采用Bezier曲線對泊車軌跡進行擬合,但泊車原地轉向問題需深入探究.目前采用模糊控制法,對自動泊車時變性運動有很好效果[5-8],但車輛處于不同初始位置時,采用模糊控制的車輛運動軌跡是不相同的,車輛不同的運動軌跡會導致入庫成功或不成功.因此,研究不同初始位置的模糊控制車輛運動軌跡,判斷其能否成功入庫,是自動泊車的關鍵.
1 垂直泊車的運動模型
車輛在自動泊車過程中是一個全程的低速運動過程.設車庫長、寬分別為5.5 m和2.4 m,建立的垂直泊車運動模型如圖1所示.圖中各參數定義如下:φ為車身方向角(x軸正向與車輛中心軸線的夾角),取逆時針方向為正;θ為前輪轉角(車輛前輪方向與車輛中心軸線的夾角),取順時針方向為正;v為車輛運動速度;L為軸距.
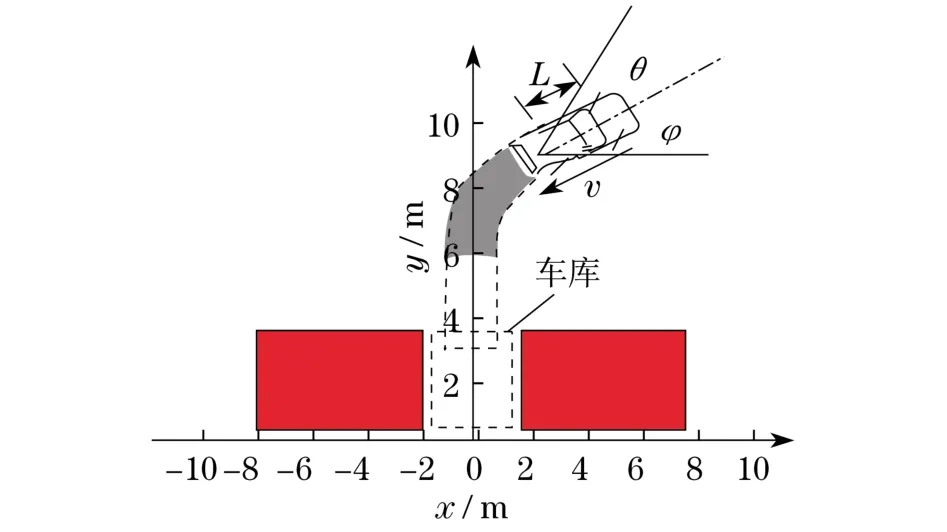
圖1 垂直泊車的運動模型Fig.1 Motion model of vertical parking
(xf,yf)為車輛前軸中心坐標,(xr,yr)為車輛后軸中心坐標.坐標原點定為車輛入庫后的后軸中心點.車輛后軸中心在垂直方向上速度為0[5],可以得到

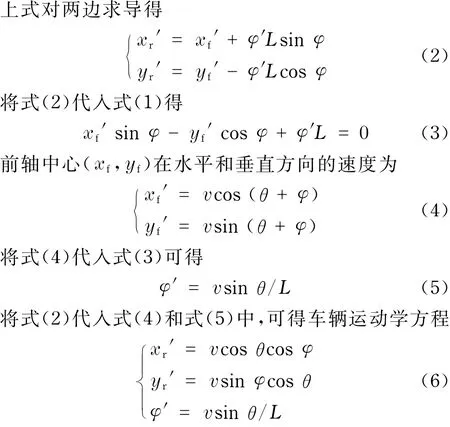
后輪軌跡在車體運動過程中完全體現車體的運動軌跡,可將后輪軸線中心坐標(xr,yr)認為是車體運動坐標,車輛的運動軌跡用(xr,yr,φ)來表示,為方便起見,用(x,y,φ)來表示.車輛入庫后最終狀態為(0,0,0),車輛始點位置設定為(x0,y0,φ0).系統對于車輛的控制只需要θ和v,就可以實現車輛停入車庫.
2 自動垂直泊車的模糊控制
給定入庫速度v=1.39 m/s,采用模糊控制θ來控制垂直泊車入庫.圖2為自動垂直泊車模糊控制Simulink建模,用來仿真任意初始條件的行駛軌跡.模糊規則如表1所示.

圖2 自動垂直泊車模糊控制Simulink建模Fig.2 Simulink model of autonomous vertical par king fuzzy control
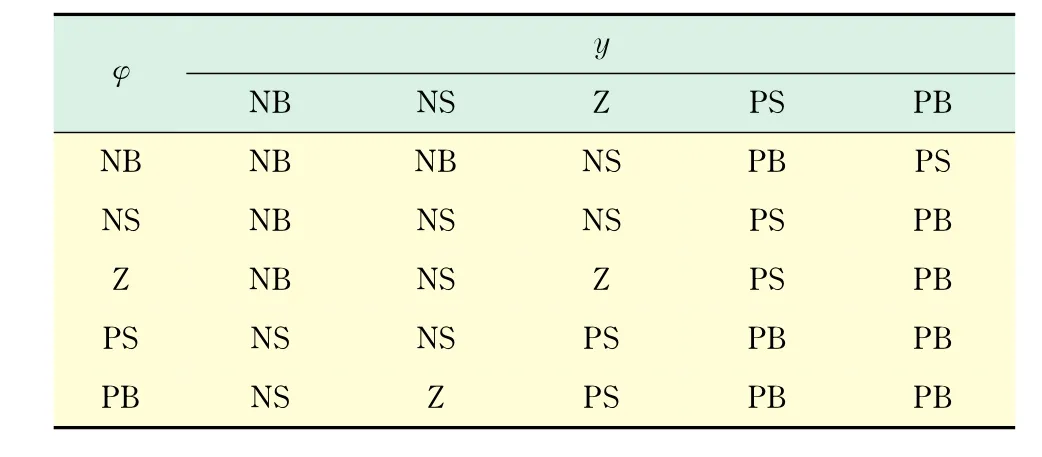
表1 車輛前輪轉角的模糊規則Tab.1 Fuzzy rule set for front wheel angle
3 仿真分析
3.1 車輛初始轉角φ0=0o不變,改變初始坐標(x0,y0)時的車輛運動軌跡仿真
車輛初始坐標為(4.0,8.0)時,其運動軌跡仿真如圖3所示,車輛通過右轉方向使車輛進入車位,與實際泊車操作相符合.從車輛端點軌跡可知,整個泊車過程中,車輛輪廓線與周圍環境障礙無交點,表明車輛實現了無碰撞地進入車位,即成功入庫.該初始坐標下的前輪轉角θ及車身方向角φ的變化情況如圖4所示,在整個泊車過程中,θ由小變大再變小,φ由0o變成90o,符合實際車輛的操作.
車輛初始坐標為(4.0,7.0)時,其運動軌跡仿真如圖5所示,整個泊車過程中車輛輪廓線與左側車庫相碰,表明泊車失敗.θ和φ的變化如圖6所示.
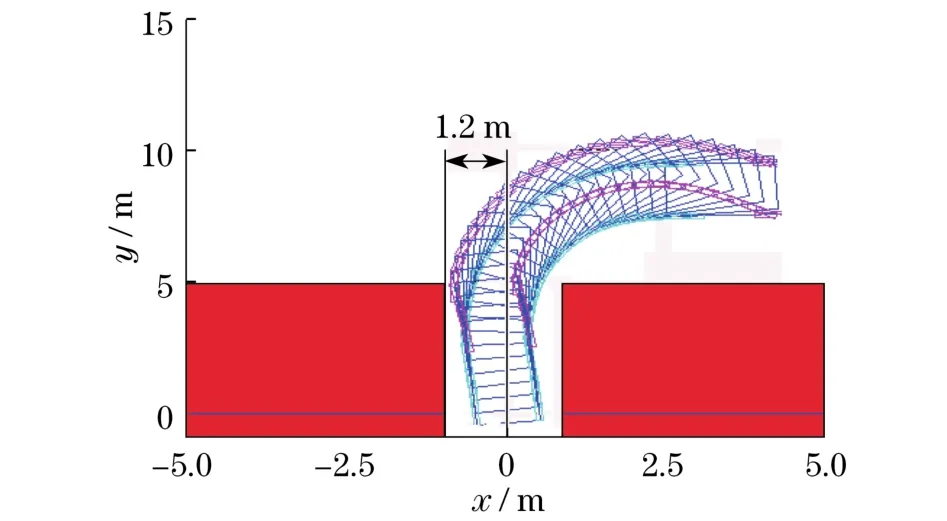
圖3 初始坐標(4.0,8.0)時的車輛運動軌跡仿真Fig.3 Vehicle trajectory simulation at the initial coordinate(4.0,8.0)
本文對多種組合的初始位置進行了仿真,垂直泊車過程中車輛最左側橫坐標如表2所示(見下頁).因為車庫寬度為2.4 m,所以車庫左側邊緣為-1.2 m,表2中陰影區域表示泊車成功的坐標值.由表2可以看出,泊車起始位置橫坐標與縱坐標大于極限值時,距離原點越遠,泊車效果越好.采用模糊控制后,一次性順利入庫的最小初始位置是(4.0, 8.0),該數值可用來設計最緊湊停車庫,使之占地面積最小或停車最多.
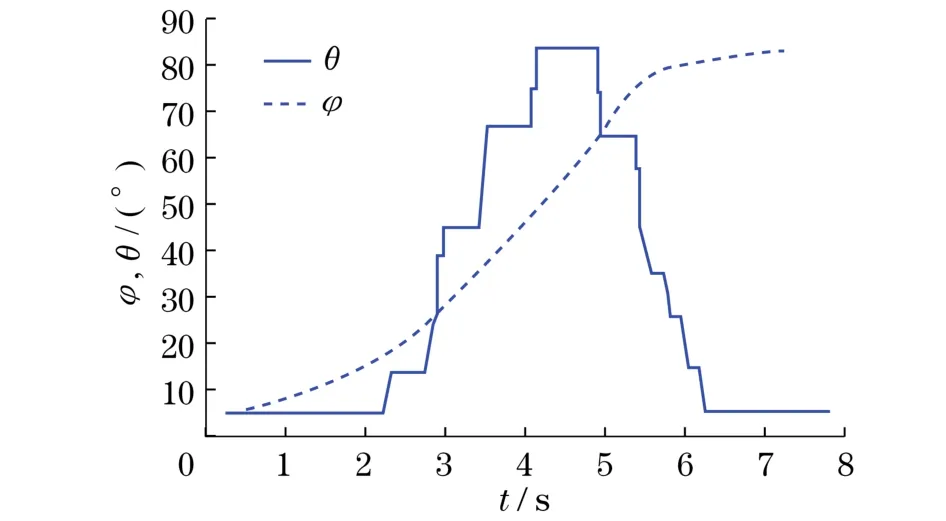
圖4 初始坐標(4.0,8.0)時的θ和φ變化Fig.4 Variation ofθandφat the initial coordinate(4.0,8.0)
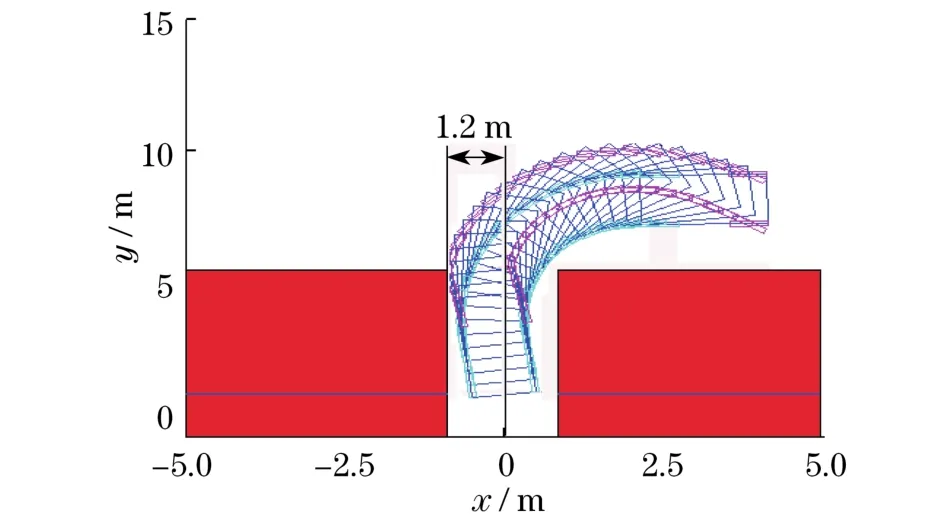
圖5 初始坐標(4.0,7.0)時的車輛運動軌跡仿真Fig.5 Vehicle trajectory simulation at the initial coordinate(4.0,7.0)
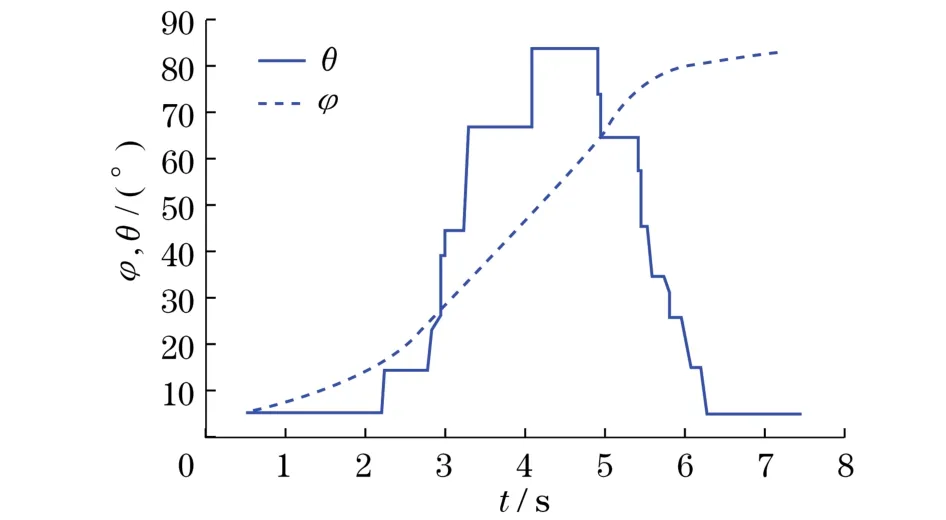
圖6 初始坐標(4.0,7.0)時的θ和φ變化Fig.6 Variation ofθandφat the initial coordinate(4.0,7.0)
3.2 車輛初始坐標(x0,y0)不變,改變φ0時的車輛運動軌跡仿真
圖7(見下頁)是車輛初始坐標(4.0,8.0),φ0= -20°時車輛運動軌跡,當在最小初始位置為(4.0,8.0)時,初始車身方向角減小將影響垂直泊車效果,且泊車不成功.前輪θ和φ的變化如圖8所示(見下頁).圖9(見下頁)是車輛初始坐標(4.0,8.0),φ0=20°時車輛運動軌跡,當最小初始位置為(4.0,8.0)時,增大初始車身轉角可以使垂直泊車順利入庫.其前輪轉角θ及車身方向角φ的變化如圖10所示.
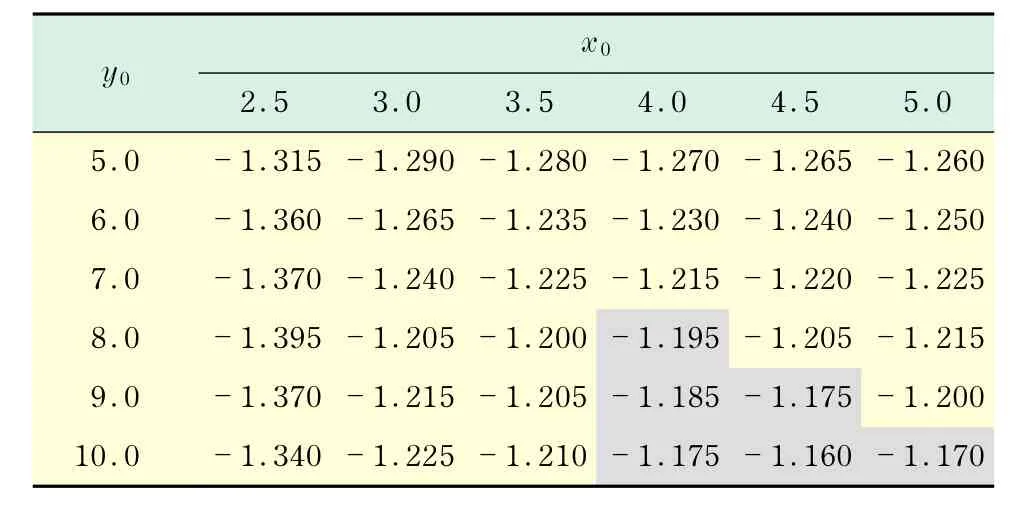
表2 泊車過程中不同初始坐標下的車輛最左側位置Tab.2 The most left side of vehicle during the par king process at different initial coordinates
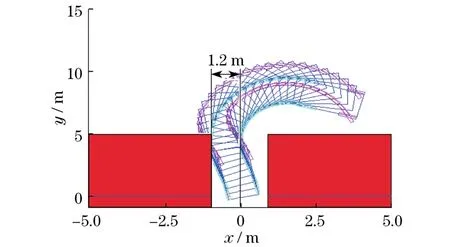
圖7 初始坐標(4.0,8.0)時的車輛運動軌跡的仿真(φ0=-20°)Fig.7 Vehicle trajectory simulation at the initial coordinate(4.0,8.0)(φ0=-20°)
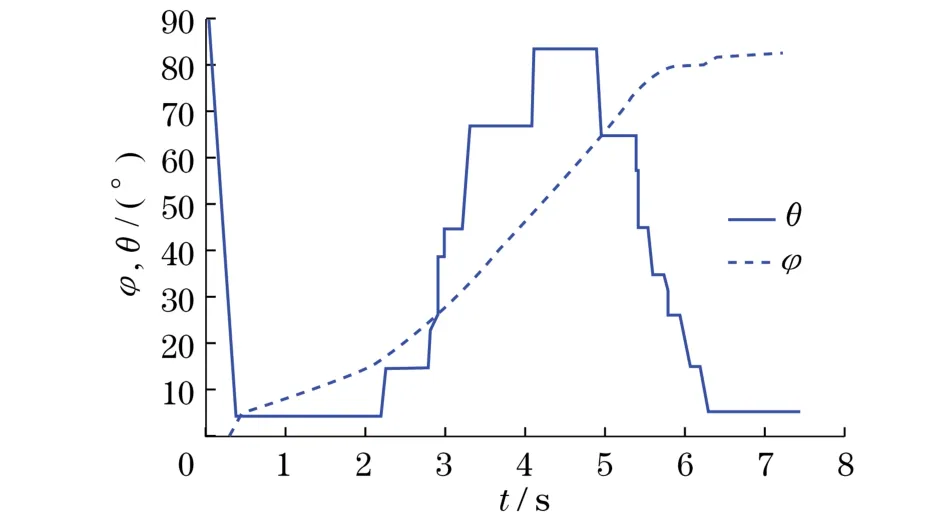
圖8 初始坐標(4.0,8.0)時的θ和φ(φ0=-20°)Fig.8 Variation ofθandφat the initial coordinate(4.0,8.0)(φ0=-20°)
改變不同初始位置,泊車過程中車輛運動最左側位置的仿真結果見表3,可以看出改變車身轉角會影響入庫效果,初始車身轉角越大,泊車入庫效果越好,從而來建造更緊湊的停車場.緊湊型的停車場可以采取增大初始車身轉角的方式,車輛也可順利入庫.
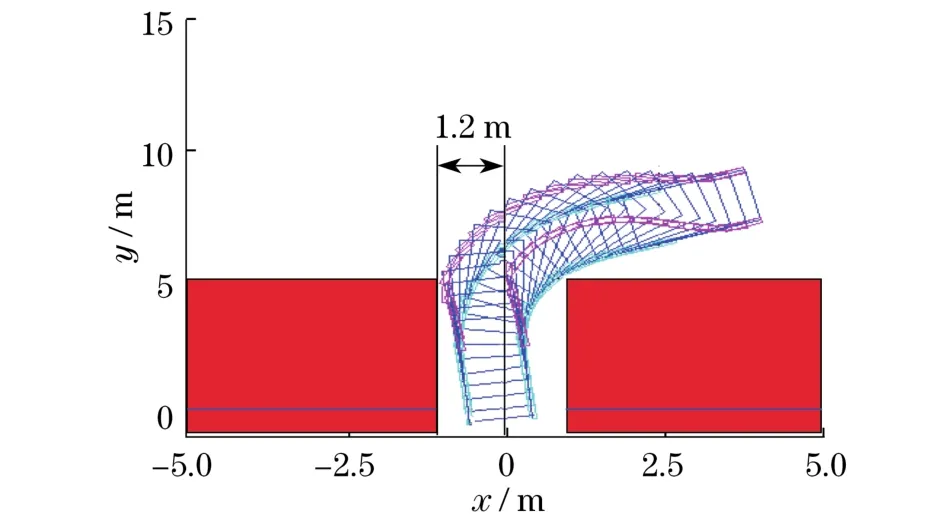
圖9 初始坐標(4.0,8.0)時的車輛運動軌跡仿真(φ0=20°)Fig.9 Vehicle trajectory simulation at the initial coordinate(4.0,8.0)(φ0=20°)

圖10 初始坐標(4.0,8.0)時的θ和φ(φ0=20°)Fig.10 Variation ofθandφat the initial coordinate(4.0,8.0)(φ0=20°)

表3 泊車過程中不同初始方向角下的車輛最左側位置Tab.3 The most left side of vehicle during the parking process at different initial direction angles
4 結 論
通過對泊車過程分析,建立了自動垂直泊車的運動模型.基于Simulink建立了自動垂直泊車的模糊控制仿真模型.在計算中,改變車輛后軸中心點初始坐標值以及車身方向角,仿真結果表明:在超過極限位置的范圍時,無法實現無碰壁泊車,改變初始泊車角度可改善泊車效果;初始坐標超過極限范圍時,增大初始角度可使泊車無碰壁入庫,在極限范圍內減小初始角度也會使泊車失敗.
[1] Jamil T.Design and implementation of a parking helper [C]∥Proceedings of the World Congress on Engineering and Computer Science.San Francisco: IEEE,2009:978-988.
[2] Nejad M K.Fuzzy logic based autonomous parallel parking of a car-like mobile robot[D].Montreal: Concordia University,2006.
[3] Lee J Y,Lee J J.Multiple designs of fuzzy controllers for car parking using evolutionary algorithm[C]∥Proceedings of the 4th IEEE International Conference on Mechatronics.Kumamoto:IEEE,2007:1-6.
[4] 劉鈺,馬艷麗,李濤.基于Bezier曲線擬合的自主平行泊車軌跡模型仿真[J].科技導報,2011,29(11):59-61.
[5] 孟繁微.車輛垂直泊車轉向控制算法研究[D].長春:吉林大學,2011.
[6] 黃貞輝,陳瑋,涂建.家用變頻空調溫度模糊控制算法研究[J].上海理工大學學報,2013,35(2):169-174.
[7] 楊昔陽,尤晴曦,李洪興.基于變論域理論的自動倒車控制[J].北京師范大學學報(自然科學版),2005,41 (4):348-350.
[8] 魏赟,韓印,范炳全.基于多智能體和模糊控制的道路交叉口建模與仿真[J].上海理工大學學報,2010,32 (3):259-262.
(編輯:董 偉)
Steering Control for Autonomous Vertical Par king Based on Fuzzy Algorithm
WANG Younan, FANGZuhua, SUN Ying, WANGKang, XUHongbing
(College of Mechanical and Electronic Engineering,Shanghai Normal University,Shanghai 200234,China)
In order to improve the precision and security of autonomous parking,a steering kinematics model was establised,taking the initial position and steering-angle as key control factors,and a parking steering control simulation model based on fuzzy algorithm was built with the help of Simulink.Fuzzy rules were established and the autonomous vertical parking was simulated. The influences of initial position,initial angle,and initial speed on vehicle trajectory were analyzed. The simulation shows that changing initial parameters will affect the autonomous vertical parking effect.The minimum initial position for a one-time smoothly parking was determined.The simulation shows that fuzzy control algorithm is sensitive and of no overshoot.
autonomous vertical parking;steering control;fuzzy algorithm
U 462.1
A
1007-6735(2015)02-0155-04
10.13255/j.cnki.ju sst.2015.02.011
2013-12-11
上海市地方院校能力建設計劃項目(12160503000)
王友楠(1988-),男,碩士研究生.研究方向:電控技術.E-mail:spartainic@yahoo.com
方祖華(1964-),男,教授.研究方向:內燃機燃燒及排放控制、新能源技術.E-mail:zuhfang@shnu.edu.cn
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
