電磁導向智能車設計探討
2015-06-24 23:07:40鞠寶鋒等
中國高新技術企業(yè)
2015年23期
鞠寶鋒等


摘要:文章主要介紹了以MK60DN512VLQ10微控制器為核心控制單元的電磁導向智能車。其使用6*8mm 10mH工字型電感進行路況采集,通過舵機打角、雙電機差速實現(xiàn)對智能車方向控制和速度控制;采用干簧管對起跑線進行檢測,實現(xiàn)停車控制。電磁導向智能車的設計及開發(fā)過程中主要涉及車模機械結構調(diào)整、控制算法的開發(fā)、信號采集放大電路和電機驅(qū)動電路的設計。
關鍵詞:微控制器;智能車;電磁導向;PID;電磁傳感器 文獻標識碼:A
中圖分類號:TP242 文章編號:1009-2374(2015)25-0014-02 DOI:10.13535/j.cnki.11-4406/n.2015.25.007
1 設計思路及方案的總體說明
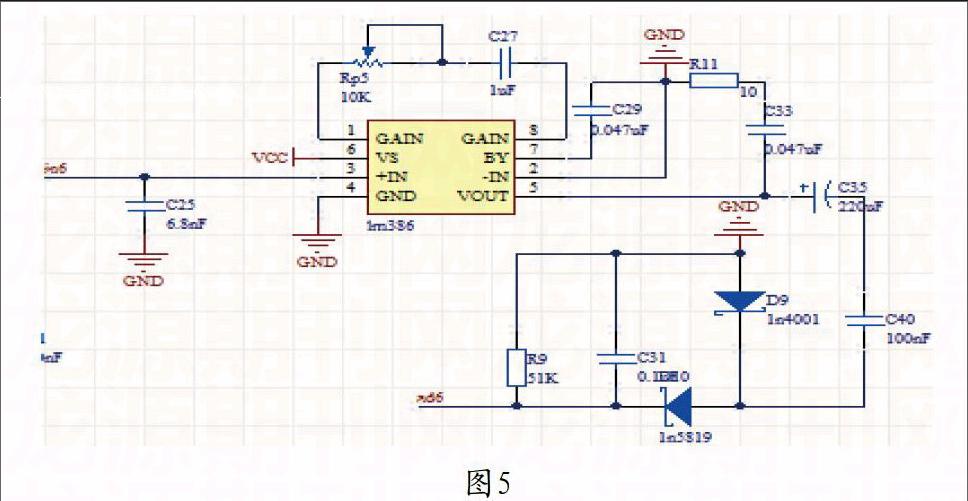
電磁引導智能汽車利用麥克斯韋電磁場理論,通過100MA的電磁傳感器采集線交流電產(chǎn)生的電磁場測試路徑。電感采集的電壓經(jīng)過信號放大、檢波和整流輸入單片機,實現(xiàn)對中心線的提取。智能車采用PID進行速度控制,PD進行方向控制。其通過中心線的提取判斷車身角度,并結合路況的不同,通過舵機打角、電機差速為小車選取最優(yōu)路徑。
根據(jù)智能車系統(tǒng)的基本要求,我們設計了系統(tǒng)結構圖,如圖1所示:
2 機械結構設計
2.1 主銷后傾角
主銷后傾角安裝在前軸,主銷上面稍微向后傾斜角度。它使車輛離心力形成產(chǎn)生的轉(zhuǎn)矩和車輪的方向相反的方向轉(zhuǎn)變,迫使車輪偏轉(zhuǎn)后自動恢復到其原始位置在中間。主銷后傾角較大,速度越高,前輪的穩(wěn)定性更好。汽車主銷內(nèi)傾和連鑄機自動校正,維持一個連續(xù)函數(shù)。調(diào)整主銷后傾角為1°~3°。
2.2 主銷內(nèi)傾角
主銷內(nèi)傾是內(nèi)置的主銷內(nèi)傾角,前角略其作用在于前輪自動回正,掩埋的前輪自動回大點的積極作用,而且越猛越費力,輪胎磨損增大角度;……
登錄APP查看全文
