基于單片機的機電調平試驗系統研究
2015-07-07 07:05:08張付祥陳萬軍孫書鵬
制造業自動化 2015年1期
張付祥,陳萬軍,孫書鵬
(河北科技大學 機械工程學院,石家莊 050018)
0 引言
很多特殊用途的工程車輛在工作之前要先進行精度較高的水平調整,要求調平速度快,自動化程度高,還要可靠性高。過去主要采用手工調平,由多人反復操作調節支腿,通過觀察氣泡達到水平,這種方法不僅調節時間長,而且精度低[1]。目前調平系統應用較多的是采用液壓調平,但液壓調平系統也有諸多缺點,如調平時間較長、響應遲鈍、漏油、成本高、維護困難等問題。機電調平相比比液壓調平優點是調平時間短,精度高,可靠性好等[2]。
1 單支腿機械結構
本文提出一種基于單片機的機電式自動調平試驗系統,調平支腿主要由驅動電機、減速器、絲杠螺母、內外套筒、限位螺釘以及行程開關組成,結構原理如圖1所示。支腿通過控制驅動電機的起停以及轉向將動力和轉矩輸出,由錐齒輪傳遞進行減速,同時將力矩傳遞給絲杠,把電機的螺旋運動轉化為直線運動,從而實現支腿的舉升和收藏運動,并且由限位螺釘實現支腿的快速升降功能,由上下行程開關來限制支腿的行程[3],調平結束后,由力傳感器判斷虛腿。

圖1 調平支腿結構原理圖
2 平臺調平方式
現有調平系統的支撐方式主要有三點式、四點式以及多點式調平,其中多點式是指六點以上的調平方式。
2.1 三點式調平
由幾何知識可知不在同一條直線上的三點確定一個平面,或者等效為不平行的兩條直線確定一個平面,故可以在相交直線上各安裝一個傾角傳感器,通過考察平面內兩條相交直線是否水平,來判斷平臺的水平度。三點式平臺模型如圖2所示。
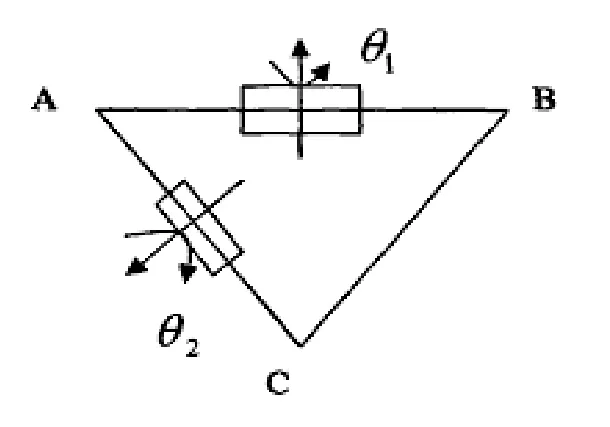
圖2 三支腿式系統平臺模型
根據兩個傾角傳感器測得的傾角θ1和θ2可以判斷三個支撐點A、B、C的相對高低[4],系統平臺調平時,θ1和θ2同時滿足要求后,各個支腿停止運動,此時系統平臺處于我們所認為的水平狀態。由于精度的限制,認為平臺已經水平,但是平臺距離真正的水平還存在一定的誤差,平臺的水平誤差θ與θ1、θ2的關系為:

θ1和θ2測量范圍為 ,為試驗平臺要求參數,水平誤差θ為:

如果 ,同時將系統平臺的三條支腿的距離設計成等邊三角形,可以得出:

三點式調平控制原理簡單,調平速度快,成本較低,但抗傾覆能力差,尤其對于重載式車輛,是必須要避免的。
2.2 四點式調平
對于四點式調平系統的四條支腿布置方式按對稱式布置,分別將四條支腿置于四個角的位置,這種四腿支撐的方式保證了平臺受力均勻,四條支腿分列兩側也保證了調平系統平臺的穩定性,同時也增強了平臺的抗顛覆性能力。四點式平臺中央安裝雙軸傾角傳感器,如圖3所示。

圖3 四支腿調平系統平臺模型
四點式調平系統平臺在調平完成時也會產生一定的誤差,取 ,由式(2)得:

由此得知,四點式調平不但解決了抗傾覆能力差的問題,同時提高了調平的精度,但是四點調平結束后,容易出現虛腿現象,從而影響系統的穩定性。為了解決虛腿問題,在每個支腿上都裝有壓力傳感器,通過比較調平后各支腿的壓力值與靜態下各支腿壓力值,差值如果超出一定的誤差,則是虛腿并需要對其進行充實。
2.3 多點式調平
多點式調平的原理相近,考慮到在調平系統工作中平臺會發生形變,為了解決這個問題,通過增加支腿數量來減少平臺發生形變。這顯然達到了目的,但在多支腿調平系統的調平過程中,由于支腿的增加使得調平算法復雜,控制系統也變得復雜,與此同時調平系統相對應的調平時間也會相應增加,各個支腿的受力不均勻,虛腿問題更加突出。
綜合考慮各種調平方式的調平時間、精度、成本、抗傾覆性等因素,采用四點調平方式。
3 電控系統硬件構成
四腿機電調平電控系統硬件結構如圖4所示。

圖4 硬件結構圖
傾角傳感器:選用高精度數字雙軸傾角傳感器,能輸出X、Y兩個垂直方向上的角度,分辨率為0.002o,可選RS232接口,波特率可調,工作方式為應答模式和自動模式。
壓力傳感器:測量支腿所承受的壓力,采用RS232接口,工作于應答模式。
位置傳感器:選用性能較穩定的接近開關,用于限制絲杠的行程。
單片機:選用ATMEL公司生產的AT89C52單片機,接收操作人員的控制按鍵輸入,把接收到的傾角傳感器和壓力傳感器的數值進行轉換,并把結果顯示在數碼管上,并且選擇匹配的調平方式,驅動電機按合適的方向運動和的距離,實時監控,實現調平。
報警電路:當系統出現故障,如壓力過大、絲杠超出行程,會通過蜂鳴器或點亮發光二極管通知操作人員。
4 調平方法研究
調平系統的調平方法主要包括角度誤差調平法和位置誤差調平法。角度誤差調平法通過直接檢測平臺的X軸和Y軸的傾角值,通過伸長或縮短支腿,使傾角值減小到要求的誤差范圍之內。位置誤差調平法首先通過計算確定每條支腿要伸長或縮短的距離,然后驅動相應支腿動作,直到四個支腿平齊,使平臺達到水平。由于平臺的載重一般比較大,當支腿需要縮短時,平臺下降會產生較大慣性[5],容易發生抖動和傾覆,所以一般采用“逐高式”,即只升不降的方法實現調平。系統的調平過程如圖5所示。
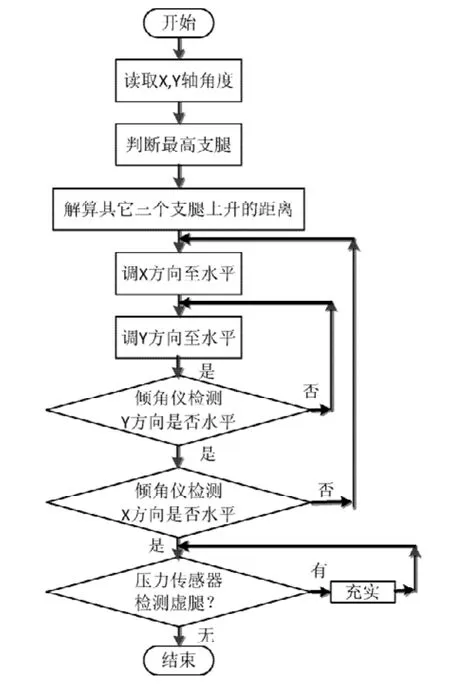
圖5 調平過程流程圖
平臺初始狀態如圖6所示,系統上電接收到調平開始命令之后,首先通過傾角傳感器讀取X軸和Y軸的角度 和 ,然后確定平臺的四個支撐點的最高點。最高點的判斷方法如下(設定角度精度為):
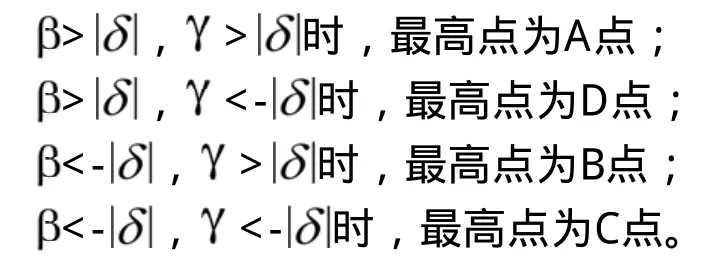
調平過程中,保持最高點不動,解算出三條較低支腿的行程(假設最高點為C,AD之間的距離為a,AB之間的距離為b),由于平臺為剛性平臺,為了消除單點升高時,帶來的虛腿問題,采用雙腿同時升高,同時還簡化了算法,計算如下:
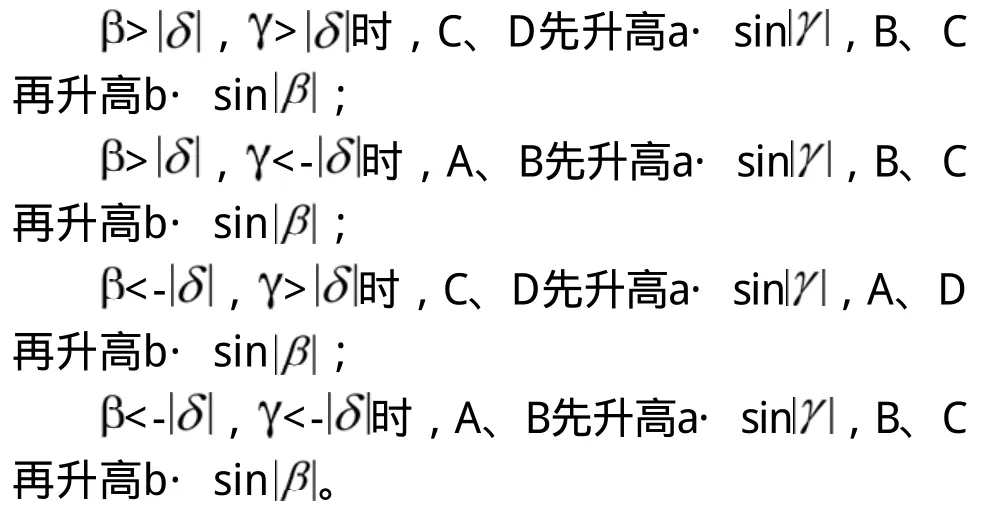
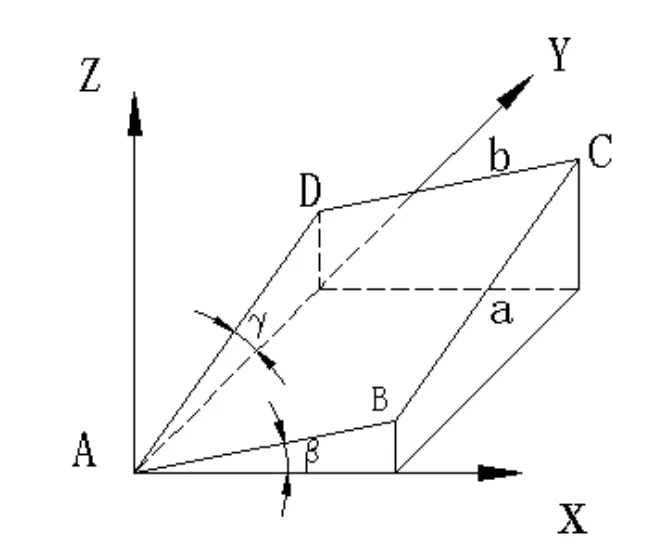
圖6 傾斜平臺示意圖
解算出各支腿的行程之后,如果同時調整X方向和Y方向水平,會使算法復雜,既增加了工作量,又延長了調平時間,所以先調整X方向水平,然后調整Y方向水平,在調整Y方向水平時,可能會影響X方向的水平,則當這兩個方向都調整水平后再進行判斷,如果水平度不滿足精度要求,再分別進行調平,如此循環,直到達到所要求的精度范圍之內。在分別進行調平的過程中,為了增加調平精度和縮短調平時間,在調平過程中,采用粗調平和精調平相結合的方法。粗調平是指采用位置誤差調平法,在解算出各支腿行程之后,采用較快的速度先上升到理想距離的95%,以此來縮短調平時間。精調平是指采用角度誤差調平法,在粗調平結束后,直接通過檢測傾角的角度值來判斷平臺的水平度,雖然調平時間長,但可以保證調平精度。
由于各種因素的影響,在X方向和Y方向都調平之后,可能會有虛腿產生,影響系統的穩定性。通過判斷壓力傳感器的壓力值,便可判斷出虛腿,并進行充實。虛腿充實后仍然要檢測平臺的水平,滿足精度要求時,調平結束,鎖定支腿。
5 結論
基于單片機的四支腿機電自動調平試驗系統,具有控制原理簡單、穩定性高、便于維護、性價比較高等優點。經測驗該系統能有效地避免虛腿產生,發生傾覆現象,具有很強的通用性,該試驗系統為進一步開發實際應用系統提供了硬件基礎。四腿機電調平系統可以應用于汽車、雷達、衛星天線及其他需要調平的裝置。
[1]李迪科,李萍,等.某雷達自動電調平控制系統的設計[J].重慶大學學報,2004,27(6):93-95.
[2]李忠于.某雷達自動調平機構的設計分析[J].火控雷達技術,2002,31:43-46.
[3]婁華威,卜德嶺,等.電液比例閥控液壓調平系統設計與仿真研究[J].流體傳動與控制, 2009,(5): 10-11.
[4]歐同庚,王琪,等.水平面基準系統的自動調平方法研究[J].大地測量與地球動力學,2008, 28(5):129-131.
[5]凌軒,朱玉泉,等.雷達天線車自動調平系統設計[J].液壓與氣動,2008,(4):1-3.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
火花(2019年12期)2019-12-26 01:00:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
人大建設(2019年12期)2019-05-21 02:55:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
學苑創造·A版(2015年11期)2016-01-14 09:03:27
