動力電池組裝線電芯搬運機械手應用設計
2015-07-07 07:05:08徐光銀
制造業自動化 2015年1期
徐光銀
(合肥國軒高科動力能源股份公司,合肥 230011)
0 引言
現代工業機械手,是基于示教再現和主從控制方式,能適應產品種類變更,具有多自由度動作功能的柔性自動化設備[1]。90年代至今,氣動技術突破了傳統的死區,經歷著飛躍性的發展,人們克服了閥的物理尺寸局限,真空技術日趨完美,高精度模塊化氣動機械手問世,智能氣動這一概念產生,氣動伺服定位技術使氣缸高速下實現任意點自動定位,智能閥島十分理想的解決了控制問題[2~4]。
氣動機械手作為機械手的一種,它具有結構簡單、重量輕、動作迅速、平穩、可靠、節能和不污染環境等優點而被廣泛應用[5,6]。氣動機械手主要包括感知、定位、控制、執行部分,采集感知和控制信號均由智能閥島來處理,氣動伺服定位系統替代了伺服電機、步進馬達或液壓伺服系統,氣缸完成原來由液壓缸或機械所作的執行動作[7]。
公司動力電池組裝線卷繞段至平壓段輸送線之間的電芯搬運,需要人工作業,自動化程度低,勞動強度大,因此需要應用氣動自動化技術,設計電芯搬運機械手,將卷繞段輸送線上的電芯,自動取料放置到平壓段輸送線上,實現兩段輸送線間的自動化連接,高電芯搬運自動化程度,降低勞動強度(如圖1所示)。
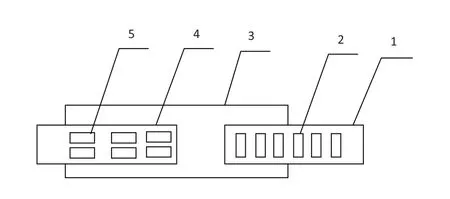
圖1 動力電池組裝線電芯搬運機械手平面圖
1 電芯搬運機械手應用設計
電芯搬運機械手包括定位機構1、抓取機構2、移動機構3。當電芯從卷繞機自動下料至卷繞段輸送線上,隨著輸送線移動到機械手的定位機構1的位置,定位機構1對電芯進行準確定位,電芯定位后,抓取機構2進行抓取,電芯抓取后,移動機構3將電芯從卷繞段放置到平壓段輸送線上,如圖2所示。
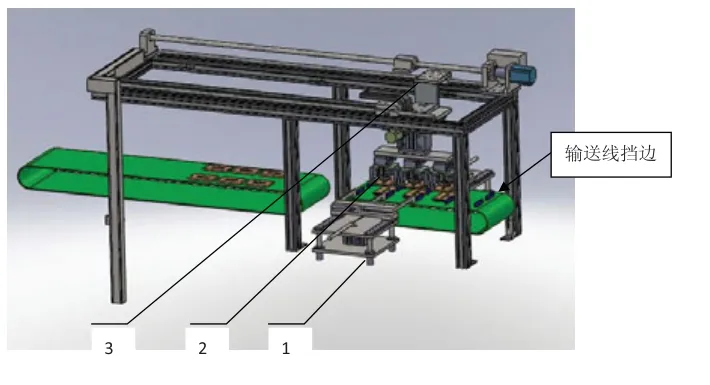
圖2 動力電池組裝線電芯搬運機械手結構圖
1.1 定位機構
機械手定位機構主要包括推桿1、歸正毛刷2,設計原理是分別實現X、Y軸方向的定位,當電芯X軸方向不在輸送線中間時,此機構通過兩側的氣缸式推桿1同時將電芯推向輸送線中間位置,當Y軸方向未靠輸送線擋邊時,此機構通過歸正毛刷2使電芯側面靠在輸送線擋邊上,如圖3所示。
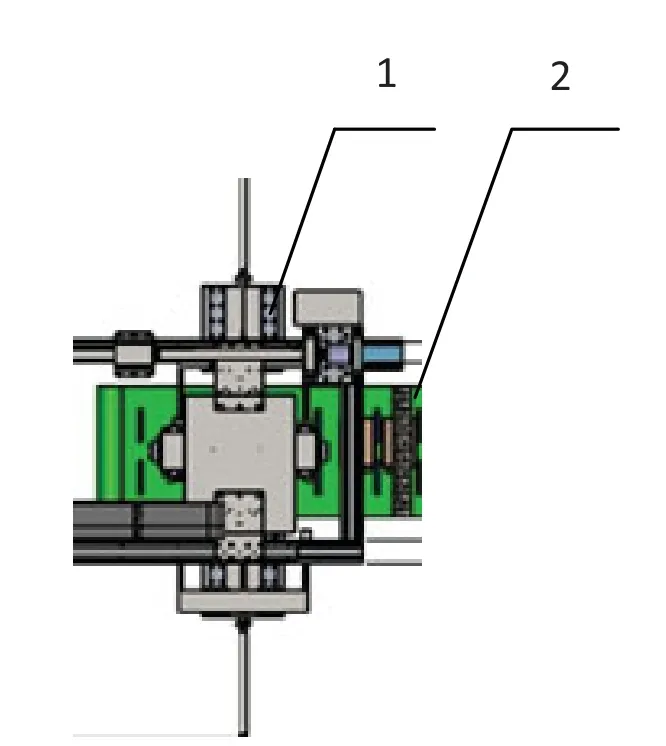
圖3 機械手定位機構結構圖
1.2 抓取機構
機械手抓取機構主要包括旋轉氣缸1、手指氣缸2、抓手3、傳感器支架4、壓緊條5,設計原理是傳感器支架4上的傳感器感應卷繞段輸送線上的抓取位有電芯,手指氣缸2開始動作,抓手3進行抓取,電芯抓取后,壓緊條3壓緊電芯,防止電芯在移動過程中掉落,電芯在移動過程中,旋轉氣缸1同時動作,完成電芯90°旋轉,如圖4所示。
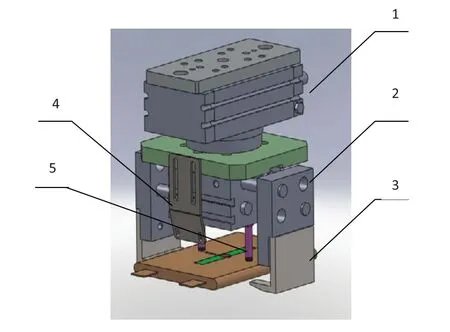
圖4 機械手抓取機構結構圖
1.3 機械手移動機構
機械手移動機構主要包括Y軸驅動電機1、Y軸導軌絲杠2、X軸驅動電機3、X軸導軌絲杠4,設計原理是電芯抓取后,Y軸驅動電機1驅動抓取機構,先沿著Y軸導軌絲杠2移動到平壓段輸送線后,X軸驅動電機3驅動抓取機構,再沿著X軸導軌絲杠4將電芯放置到輸送線上,如圖5所示。
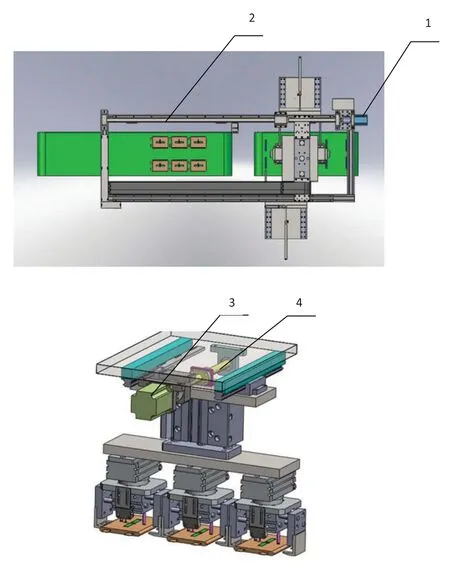
圖5 機械手移動機構結構圖
2 實施效果
動力電池組裝線電芯搬運機械手實施后,實現了卷繞段與平壓段電芯的自動化搬運,提高自動化程度,降低勞動強度,單班搬運人員由實施前的1人減少到0人,每日雙班即減少電芯搬運人員2人。
機械手搬運時間計算公式:

式(1)中,CT為連續完成相同的兩個產品之間的間隔時間,即節拍[8];
SX為X方向的移動行程;
SY為Y方向的移動行程;
V為轉移機械手的移動速度;
TA為抓取電芯時間;
TB為放置電芯時間;
TC為抓取延遲時間;
TD為放置延遲時間。
機械手轉移機構的移動速度為800mm/s,Y方向移動行程為1200mm,X方向的移動行程為400mm,每次3個電芯的抓取時間1.2s,放置時間0.9s,抓取延遲時間0.4s,放置延遲時間0.5s,每個電芯的搬運節拍計算為:
CT=((1200+400)/800+1.2+0.9+0.4+0.5)/3=(2+1.2+0.9+0.4+0.5)/3=1.67s
因此實施后雙班減少作業人員2人,機械手自動搬運節拍為1.67s/只,滿足生產線平均每只電芯2s的節拍要求,提高生產效率。
3 結束語
本文針對動力電池組裝線卷繞段至平壓段輸送線之間需要人工搬運電芯,自動化程度低,勞動強度大的現狀,將自動化搬運機械手引入到動力電池組裝線的生產過程中,提高電芯搬運的自動化程度,降低勞動強度,提高生產效率。
[1]張健民.工業機器人[M].北京:北京理工大學出版社,1992.
[2]SMC(中國)有限公司.現代實用技術[M].北京:機械工業出版社,2003.
[3]陸鑫盛,周洪.氣動自動化系統的優化設計[M].上海科學技術文獻出版社,1999.
[4]陶湘廳,袁銳波,羅璟.氣動機械手的應用現狀與發展前景[J]機床與液壓,2007,35(8):226-228.
[5]馬振幅.液壓與氣壓傳動[M].北京:機械工業出版社,2004.
[6]陳新之,張安龍.裝配線機械手電氣混合控制[J].液壓與氣動,2007,3:43-45.
[7]孫兵,趙斌,施永輝.物料搬運機械手研制[J].機電一體化,2005,2:43-45.
[8]張申生.敏捷制造的理論、技術與實踐[M].上海:上海交通大學出版社,2000.
