基于壓力傳感器的矩形渠道流量自動檢測系統
2015-07-07 07:06:00王慧聰周義仁
制造業自動化 2015年6期
王慧聰,周義仁
(太原理工大學 水利科學與工程學院,太原 030024)
0 引言
我國是一個農業大國同時也是一個水資源匱乏的國家。現階段灌區用水的浪費是造成農業水資源大量流失的主要原因,對傳統水流測量的設備及方法的革新勢在必行。明渠流量檢測在農業生產中有著舉足輕重的地位,它直接關系著灌溉管理水平及灌溉用水利用率的效率。而當前常見類型的流量檢測裝置的適用范圍常常受到自身不足之處和使用條件的制約,如造價高、安裝的技術性要求較高、抗干擾能力差,測量精度低等。
針對這些存在的問題,結合當前國內外輸配水渠道普遍采用的是矩形斷面形式的特點,本文研究并設計了一種基于壓力傳感器的矩形渠道流量自動檢測系統。
1 測流原理
本系統的測流部分是基于伯努利方程進行的流速測量[1]。伯努利方程在水力學中常常被提及,涉及到很多方面的水力學知識,是水力學長久以來所采用的基本原理。
伯努利方程是理想流體定常流動中的動力學方程,即在忽略粘性損失的流體中,其流線上任意兩點之間的壓力勢能、動能及位勢能之和保持恒定[2]。對于重力場中的不可壓縮的均質流體,其表達式為:
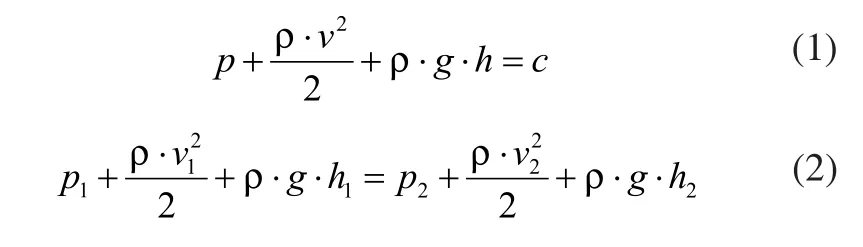
上述兩式均為伯努利方程,式(1)中p、ρ、v分別為流體所受的壓強、密度和流動的速度;h為流體所處的高度;g為當地重力加速度,為常量;c也為常量,式中的各項分別表示單位體積流體的壓力勢能、重力勢能及動能,其沿流線運動的過程中,和值保持不變,此即總能量的守恒;式(2)中,等號的左邊與右邊分別表示沿流線運動過程中的任意兩點的機械能之和。由伯努利方程可以看出,流速大處壓強低,流速小處壓強高。
如若在渠道中的同一高度處放置兩個MPX53GP壓力片,一個正對水流的沖擊、一個垂直于水流的方向。以式(2)等號左邊表示正對水流沖擊壓力片的受力情況、等號右邊表示垂直于水流方向壓力片的受力情況,則v1=0,且h1=h2,則式(2)可簡化為:

即:

式(4)表明兩個壓力片的壓差與水流流速的平方成正比,即壓差Δp與流速v是一一對應的關系。
2 壓力傳感器
本系統采用的是自主研發的基于伯努利方程的壓力式測流裝置,該裝置的感應部分采用型號為MPX53GP的壓力片,該壓力片可提供非常精確的線性電壓輸出,與施加的壓力成正比,其工作原理是將壓力信號轉換成電壓信號,轉換壓力值為0~0.5個大氣壓[3]。電壓信號為毫伏級別,經一級運算放大器放大后,再經AD轉換后采樣處理成為可顯示的數值。該裝置采用十個MPX53GP壓力片,兩兩一組,每組中一個正對水流的沖擊、一個垂直于水流的方向,均勻布置于板子的五個點處,整個采集板的高度約為58cm,該流量計可測取約50cm液位高的明渠流量值。采集板的外表除了壓力片的受力面以外其余部分均由絕緣材料環氧樹脂進行澆注,這樣克服了采集板采集水壓信號時受水流導電性的影響并可防止電腐蝕現象的發生,使得采集板的抗干擾能力大大增強,提高了感應部分的穩定性與可靠性。采集板的頂端布置有5V直流穩壓模塊和LCD1602液晶顯示屏,整個采集板呈現長方形棒狀的結構。控制板是該測流裝置的核心部分,是由STC12C5A60S2單片機組成的控制中心,具有信號的處理、數據的傳輸等功能,其外形結構為13cm×12cm的長方形PCB板。壓力傳感器產生的信號經過AD623放大電路,放大之后傳輸給單片機(因為STC12C5A60S2單片機具有自帶A/D轉換功能),由液晶顯示屏顯示出來流速值及液位值[4]。壓力傳感器的控制電路如圖1所示。
本系統的數據輸出電路是運用MAX3232CP芯片為核心設計而成的串口通訊電路,負責與控制板上的顯示儀表或上位機進行通信,電路圖如圖2所示。
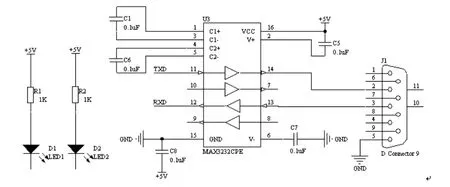
圖2 輸出電路圖
3 系統結構
1)系統框架
該系統由一套壓力傳感器,機械傳動裝置、驅動器、微處理器和計算機組成。該系統的微處理器選用STC12C5A60S2芯片,是高速、低功耗、超強抗干擾的新一代8051單片機,指令代碼完全兼容傳統8051,但速度快8~12倍。內部集成MAX810專用復位電路,2路PWM,8路高速10位A/D轉換[5]。控制工作臺動作的步進電機受單片機的程控,有著時序性的工作方式。單片機發出的脈沖信號驅動橫軸步進電機,經過聯軸器帶動橫軸的滾珠絲杠,帶動裝置橫向運動[6]。系統框架如圖3所示。

圖3 系統框架圖
2)系統結構圖
該傳動機構上載有十個壓力片,與機械傳動裝置結合可橫向自動移動,實現對渠道矩形斷面內任一點處流速的測量。系統結構如圖4所示。
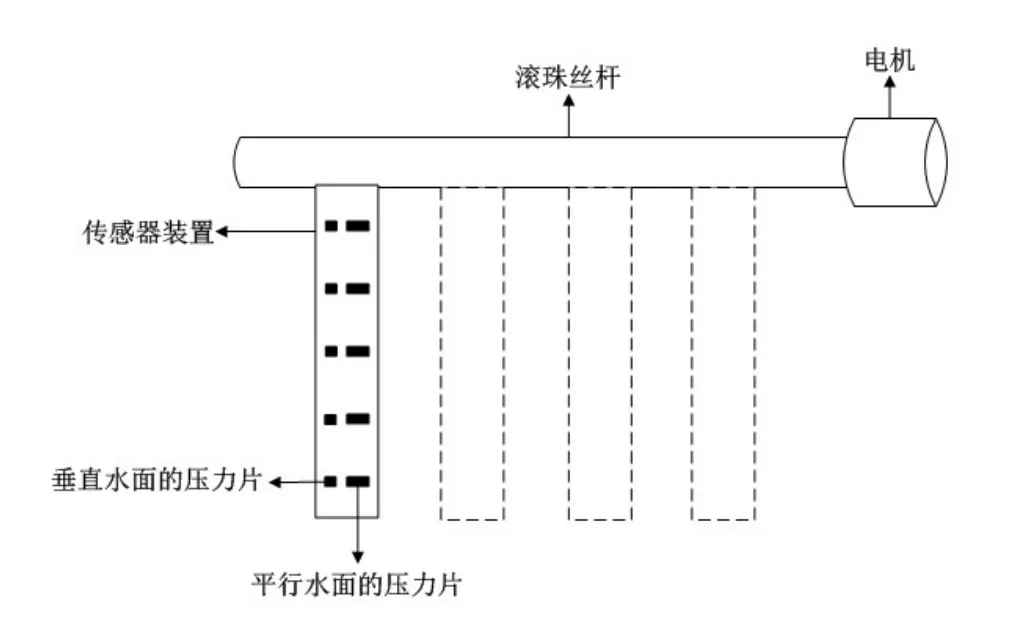
圖4 系統結構圖
該系統結構的工作原理為:本系統的測量部分采用“流速—面積法”[7]對矩形斷面渠道進行流量的測量,在本裝置的傳動機構上載有十個壓力傳感器,兩兩一組,共有五組,垂直于水平面的傳感器,測出動水壓力;平行于水平面的傳感器,測出靜水壓力。根據點線面的思路,可以分為以下三步得到流量值:1)測點流速:由兩個壓力傳感器測得的動水壓力和靜水壓力,其壓力差通過伯努利方程算出一個測點的流速,根據此方法,可以得到每個測點的流速;2)測線流速:根據水淹沒傳感器的測點數,分別求出淹沒測點的流速,把每個測點的流速加權求平均得到該條測線的流速;3)測面流速:通過機械傳動機構橫向自動移動,得到第二條,第三條…第N條測線的流速,所得N條測線的流速加權平均得到該測面的流速v。由公式Qv=vA即求得該矩形斷面的流量(v為矩形斷面的平均流速,A為矩形斷面的面積)。
4 實驗結果
為驗證該流量自動檢測系統的運行情況,選取了山西某矩形斷面明渠進行了試驗,試驗所用明渠底寬43.8cm,并將數據與流速儀所測數值進行了對比。數據如表1所示。
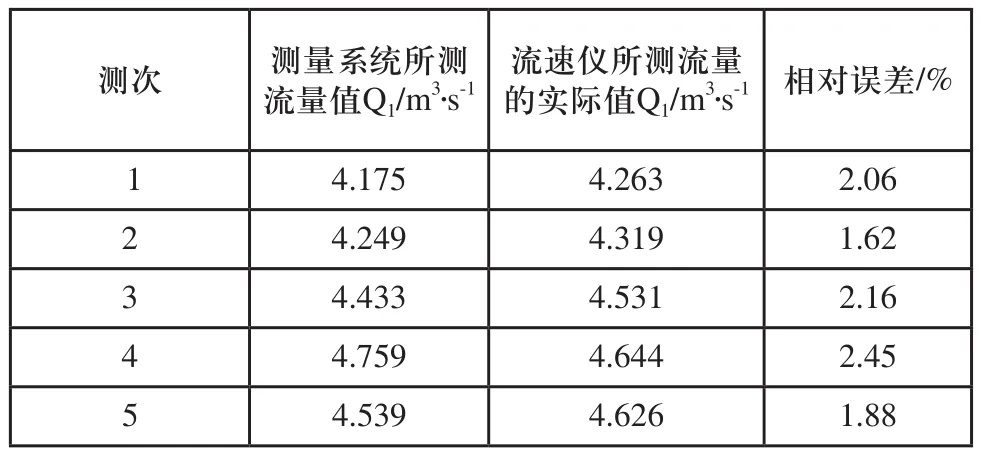
表1 實驗數據
5 結論
本系統通過在實際矩形明渠段進行了功能性的實驗,測量結果與采用流速儀測得的流量值相對誤差在3%以內,驗證了該系統的實用性與準確性[8]。
本系統在明渠流速檢測中采用由點流速到線流速到面流速的思路,實現了斷面內的多點測量,比傳統的測量精度更高,并且該系統與機械傳動機構相結合,可以橫向自動移動實現斷面內測線的任意選擇,使得技術人員更易操作,系統內的傳感器均可通過RS232總線與上位機連接,操作更加簡便,整套系統裝置結構簡單,與傳統的流速儀相比,大大降低了成本,減少了人力的投入。該系統能使用于各種復雜的使用環境,使得該系統有著良好的應用與推廣前景。
[1]陳燕黎.伯努利方程的原理及運用淺析[J].漯河職業技術學院學報,2012,11(02):86-88.
[2]余學昌.伯努利及伯努利方程的應用[J].中學物理教學參考,2001,30(07):21-22.
[3]邵彭飛,顧杲,李靜.基于MPX53GP的液位控制器設計[J].工業計量,2012,04:32-34.
[4]劉明明,呂家才,傅宗甫.水位、流速自動控制及采集系統原理與應用[J].河海大學學報,2000.
[5]宋鳳娟,付侃,薛雅麗.STC12C5A60S2單片機高速A/D轉換方法[J].煤礦機械,2010,06:219-221.
[6]張建民.機電一體化系統設計[M].北京理工大學出版,2007.
[7]胡云進,陳國偉,郜會彩.明渠規則斷面流量測量方法研究[J].水文,2009,29(5):39-41.
[8]費業泰.誤差理論與數據處理[M].機械工業出版社,2004.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
