蜘蛛機器人設計研究
2015-07-18 11:13:18江亞龍銅陵學院機械工程學院安徽銅陵244000
中國新技術新產品 2015年2期
吳 凱 江亞龍 殷 建(銅陵學院機械工程學院,安徽 銅陵 244000)
蜘蛛機器人設計研究
吳凱江亞龍殷建
(銅陵學院機械工程學院,安徽 銅陵 244000)
摘要:蜘蛛機器人是針對在狹小通道和深井的探測、搜索、救援工作。以真正實現海陸空搜尋機器人系統全方位的搜救。作為本文的研究重點是對蜘蛛機器人的機械零部件、行走機構、驅動控制和信息反饋及處理做了詳細的分析和設計,使得蜘蛛機器人滿足靈活、小巧、經濟的要求。使得蜘蛛機器人完全異于普通搜救機器人。為蜘蛛機器人設計了強大的機械手臂庫,提高其應用范圍使得蜘蛛機器人不僅能實現探索,更能替人在無法到達的環境工作。
關鍵詞:深井搜救;管道探測;蜘蛛;機器人
在21世紀的今天,隨著自然災害、恐怖活動和各種突然事故發生的越來越多,在災難救援中,救援人員用較短的時間在廢墟中尋找幸存者的幾率比較小,在這種緊急而危險的情況下,救援機器人可以為救援人員提供有效的幫助。因此那些經常接觸不到和容易被人忽略的死角,例如通風管道,就成為我們重點監測的對象。深井搜救和管道探測在搜救過程中顯得尤為重要。在保證搜救人員的安全前提下,提高搜救效率是當今社會關注的焦點。近十年來,美國、日本等西方發達國家在地震、火災等救援機器人的研究方面做了大量的工作。日本大阪大學研制出蛇形機器人,能在高低不平的模擬廢墟上前進,其頂端帶有1部小型監視器,身體部位安裝傳感器,可以在地震后的廢墟里尋找幸存者。2006年6月,中國礦業大學的機器人研究所成功研制了 “CUMT-1”礦井救災機器人,并對救災機器人的機構設計做了一些有益的嘗試。
本文提出了蜘蛛機器人的概念設計,然后著重對創新設計的移動方式及強大的機械手臂庫做了詳細的論述。
2 蜘蛛機器人本體設計
通過對國內外蜘蛛機器人移動方式的比較,蜘蛛機器人的前進方式有連桿機構式、單桿機構式和腹部蠕動式,連桿機構和單桿機構的運動方式類似于劃船時的船槳運動,是通過對壁面向后的摩擦力來實現前進,但是由于其返程路徑必須和原路徑不一致,因此都需要加入新的機構和連桿機構、單桿機構進行組合,最終形成的機構體積較為龐大,給日后進一步開發、實現小型化增添了困難。而腹部蠕動機構則可以按原路徑進行返程運動,不需要添加新的機構,因此結構較為簡單,易于小型化。故腹部蠕動機構適合于通風管道探測用的機器人。該蜘蛛機器人運動機構分為:腿的伸出機構、主體與底板的差動直線運動、旋轉機構,如圖1所示結構。

圖1 蜘蛛機器人本體結構圖
由于同一對腿實現同時伸出,同時收回,因此從經濟性、體積小的角度出發,要求其實現,一個電機同時控制一對腿的伸出和收回,因此在腿的伸出機構中需要有力的差動機構。齒輪齒條機構、連桿機構、對稱雙連桿機構、絲杠螺母副及滑輪機構等均能實現上述目標,但齒輪齒條機構的成本較高,不符合經濟性;連桿機構存在側向力,容易出現“卡死“現象;連桿對稱機構雖無側向力,但是其中涉及的固定點難以設置,因此也不適合;絲杠螺母副及滑輪機構,無側向力的存在,其價格適中,傳動比大,因此不需要減速機構,而且具有自鎖性,可以實現腳的保持于某一位置不動,且伸出力也較大,把持力大,結構小且簡單。同時,上面安裝的是滑輪和橡皮筋(考慮到經濟性,用橡皮筋代替彈簧),價格便宜,安裝要求和難度較低,故采用該機構。
蜘蛛機器人在運動時,主板與底板之間是差動直線運動,類似于蠶的蠕動過程。其要求運動要平穩,且任意位置可停、可自鎖。曲柄滑塊機構、絲杠螺母副均能實現差動直線運動,但曲柄滑塊機構累計誤差大,機械效率低,且一般做變速運動,故運動不平穩,且有慣性力,所以不適用于本機器人的機構。絲杠螺母副價格適中,傳動比大,因此不需要減速機構,而且具有自鎖性。
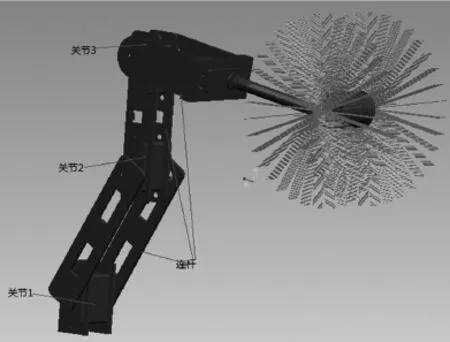
圖2 機械手臂示意圖
蜘蛛機器人通過對限位開關、電機等一系列的元器件的控制,使其能夠正常運作,即行走、轉向功能的實現。共需要使用14個限位開關。整個機器人采用順序控制,即由限位開關信號的順序來控制。通過對直流電機、步進電機和超聲直線電機的性能比較,機器人采用直流電機實現。通過對H橋集成功放電路設計和改進,即在基本H橋電路里添加旁路電容和續流二極管來保護電路,以實現對電機正反轉的控制。為實現初步行走,驗證設計思路的正確性,在機械本體做完后,設計加工撥動開關電路板,用手協調撥動開關,看其是否能夠預計運動路徑,經檢驗,嚴格按預計要求運動,故上述設計思路正確。

圖3 多種不同功能機械手結構示意圖
3 蜘蛛機器人仿生機械手臂庫設計
為滿足蜘蛛機器人復雜工作環境和特殊工作任務的需要,不僅需要蜘蛛機器人以獨特的移動方式以保證能通過,還需要配備能滿足各種作業需求的手臂。更進一步提高蜘蛛機器人的實用性,也足以能應對任務執行中遇到的各種問題。
機械臂(圖2)由3個旋轉關節、2個手臂構成,前臂于機械手相連。其中,關節一繞運動平臺垂直方向旋轉,即在垂直與X-Y面旋轉,從而使得機械手臂能夠在水平面內運動;關節二、三分別代表肩關節和肘關節,能夠保證機械臂在垂直面內運動,即Y-Z面內。三個關節自由度分布及三維仿真模型。
機械手臂庫的設計:
為滿足蜘蛛機器人復雜工作環境和特殊工作任務的需要,不僅需要給蜘蛛機器人配備以上兩種機械手臂,還需要配備能滿足各種作業需求的手臂。更進一步提高蜘蛛機器人的實用性,也足以能應對任務執行中遇到的各種問題。如圖3所示為各種不同場合所需機械手臂庫。
由于機器人使用于管道、廢墟等復雜環境,因此需要配有視覺系統來控制機器人的運動以及搜救。通過設計配制攝像頭及遠程控制方式,來控制昆蟲機器人的視覺判斷。機器人所攜帶的視覺系統可以對所處環境有一定的識別,而身處其外的工作人員需要對管道情況進行監控,必須要通過昆蟲機器人所攜帶的視覺系統傳回圖像,再對所收回的圖像進行分析并作出決策,傳給機器人,使其執行搜救的決策。
結語
這款蜘蛛機器人具有以下三大特點:
一是真正的仿生機器人,其動作及外形都是根據蜘蛛外形設計研究而成。
二是采用攀爬式運動機構,能成功的越過更多障礙,并且能在狹小空間里實現三維動作,提高機器人的工總性能和工作用途。
三是具有強大的機械手臂,既能用于管道探測,也能用于救援、偵察、排爆等集眾多功能與一身的強大機器人。
參考文獻
[1]孫桓,陳作模.機械原理(第六版)[M].北京:高等教育出版社,2001.
[2]鄒慧君.機械原理課程設計手冊[M].北京:高等教育出版社,1998.
[3]裴仁清.機電一體化原理[M].上海:上海大學出版社,1998.
[4](美)丹尼斯.克拉克.機器人設計與控制[M].北京:科學出版社,2004.
[5]陳懇.機器人技術與應用[M].北京:清華大學出版社,2006.
[6]濮良貴.機械設計(第八版)[M].北京:高等教育出版社,2006.
[7]趙淳生.超聲電機技術應用[M].北京:科學出版社,2007.
中圖分類號:TP242
文獻標識碼:A
作者簡介:吳凱,男,1992年,本科,銅陵學院,指導教師:殷建。
基金項目:本論文系國家大學生創新訓練資助項目(201310383014),安徽省大學生創新訓練資助項目(AH201310383014)。
