混合動力越野汽車動力系統匹配研究
2015-07-20 05:50:49王慧晶胡東方馬忠民郭萬超北京汽車研究總院有限公司北京101300
小型內燃機與車輛技術 2015年1期
關鍵詞:汽車
王慧晶 胡東方 馬忠民 郭萬超(北京汽車研究總院有限公司 北京 101300)
混合動力越野汽車動力系統匹配研究
王慧晶胡東方馬忠民郭萬超
(北京汽車研究總院有限公司北京101300)
以某四驅越野汽車為原型開發軸間耦合的并聯四驅混合動力越野汽車,取消原車分動器,加裝驅動電機、動力電池等電動部件,通過MATLAB軟件進行動力系統優化設計和性能匹配計算,并對軸荷轉矩進行校核分析,完成混合動力方案設計。仿真結果表明與傳統越野汽車相比,提高了混合動力越野汽車的動力性和經濟性,符合混合動力越野汽車的設計要求。
混合動力越野汽車軸間耦合動力系統性能匹配MATLAB仿真
引言
混合動力汽車開發初期,動力系統部件的優化選型和匹配計算是影響整車性能的主要因素,主要包括發動機、電動機、動力電池等電動部件的參數匹配計算和工作特性優化控制,使整車實現混合動力功能,保證動力性的同時,降低油耗和排放。
本文以某四驅越野汽車為原型開發軸間耦合的并聯四驅混合動力越野汽車,通過部件選型,參數匹配、軸荷轉矩校核研究,驗證混合動力四驅性能的可行性。

圖1 四驅越野車結構示意圖
1 軸間耦合混合動力方案
原四驅越野汽車結構方案如圖1所示,由分動器與差速器分配前后軸動力,前后軸輸出轉矩保持一定的比例關系,不能很好地適應各種路面條件。
軸間耦合混合動力結構簡圖見圖2,采用并聯驅動概念[1],取消分動箱,增加驅動電機、動力電池、DC/DC等電動部件及控制器。由電機獨立驅動前橋,內燃機獨立驅動后橋,可根據路面情況和運行狀況,進行混合驅動工況轉換。
混合動力工況見圖3,可按要求在純電動、混合動力、停車充電等工況間切換。在合理的轉矩控制下,電機助力對發動機轉矩進行削峰填谷,實現混合動力工作模式。電機還可承擔低速條件下的純電動行駛,實現一定程度的節油減排效果。在越野路面及低附著系數的非鋪裝路面條件下,軸間耦合混合動力方案可提高整車越野性能。

圖2 軸間耦合混合動力結構簡圖

圖3 混合動力工況框圖
2 混合動力系統性能匹配
2.1電機參數匹配
電機參數匹配直接關系到驅動電機的選型,進而對混合動力性能產生重大影響,是開發混合動力汽車的必要環節[2]。
電機外特性為:在額定轉速以下,以恒轉矩模式工作,在額定轉速以上,以恒功率模式工作。電機參數包括額定功率、峰值功率、額定轉速、最高轉速的選擇。選用原則為:高性能,低自重和小尺寸;在較寬的轉速范圍內有較高的效率;電磁輻射盡量小;成本低;維護方便;綜合考慮其控制系統的特點,要求能盡可能實現雙向控制,回收制動能量。
混合動力方案中,僅發動機驅動工況即可滿足車輛的最高車速要求,且高速時后輪驅動可以提高車輛的操縱穩定性。四驅功能主要在轉矩需求和越野爬坡工況下使用,因此對驅動電機的參數匹配主要考慮爬坡和越野轉矩需求[3]。
2.1.1爬坡性能
對四驅車來說,最大爬坡度60%時,前后驅動輪的附著率都不能大于地面附著系數 φ=0.8。由MATLAB仿真可知[4],如果爬坡最低穩定車速按照發動機怠速轉速計算(圖4中E點)為7.3km/h,此時發動機輸出轉矩為2572N·m,電機需求轉矩為3334 (5906~2572)N·m,大于地面能夠給前軸提供的附著力(圖5中B點)2376N·m,前輪會發生打滑。而如果將爬坡最低穩定車速提高到12km/h(圖4中F點),則電機僅需提供的轉矩為2277(5906~3629)N·m,小于地面附著力,不會發生打滑。
因此電機驅動前軸爬坡度為60%需提供的最小驅動轉矩為2277N·m(60%爬坡最低穩定車速需大于12km/h)。
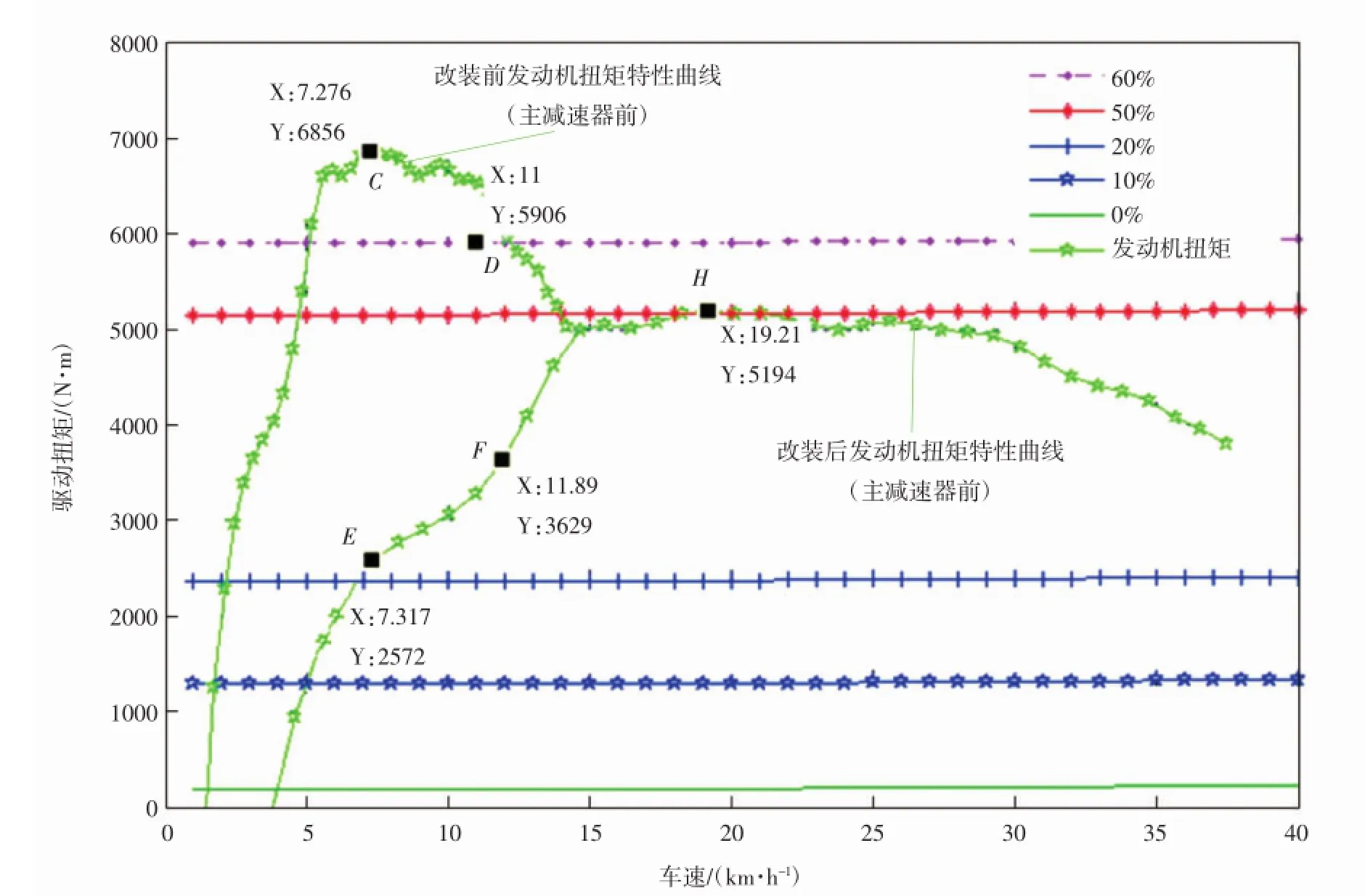
圖4 爬坡轉矩需求

圖5 60%坡度地面附著力
由圖6可知,對于60%的爬坡功率需求,可知電機起步功率(12km/h)需求為19.75(50.49~30.74)kW,持續電機功率(15km/h)需求為11.04(63.14~52.1)kW。

圖6 爬坡功率需求

圖7 前輪越障轉矩需求
2)越障性能
計算前后輪的越障高度隨驅動力矩變化的關系,由圖7可知前輪過0.35m臺階前后軸需求轉矩分別為2810N·m,5040N·m。
由圖8可知后輪過0.28m臺階前后軸需求轉矩分別為3031N·m,4380N·m。
計算前后軸轉矩功率需求見表2。

圖8 后輪越障轉矩需求

表2 越野時前后軸最大轉矩需求
選擇前軸最大越障轉矩需求3031N·m為電機峰值轉矩需求,爬坡(60%)轉矩需求2277N·m為額定轉矩需求。電機與單級減速器的匹配見表3。

表3 電機與減速器參數匹配
由表3綜合考慮,選取5.92為電機主減速比,電機驅動的最高車速為40km/h。
選擇電壓等級為288V的直流永磁無刷電動機,參數見表4,既具備交流電動機結構簡單、運行可靠、維護方便等優點,又具備直流電動機的運行效率高、無勵磁損耗以及調速性能好等優點。冷卻方式選擇水冷。
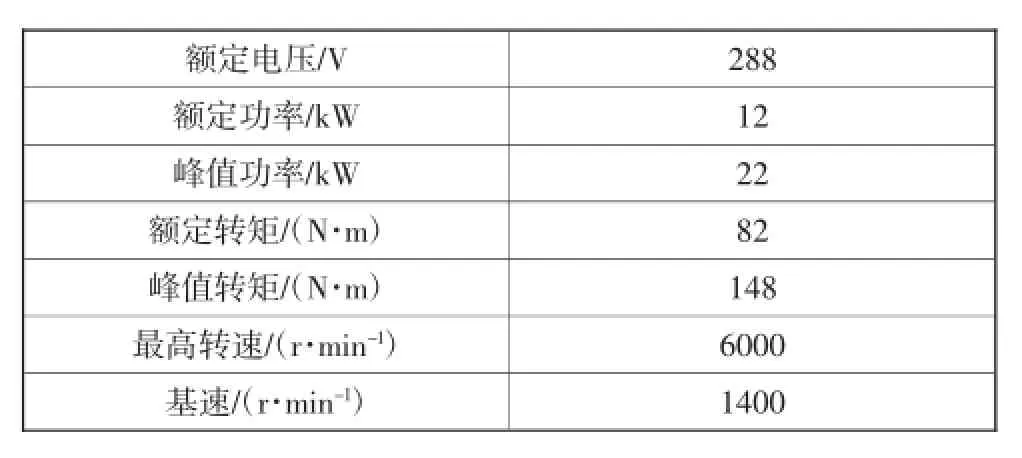
表4 電機匹配參數
原車設計涉水深度為600mm,分動器最低位置< 390mm,因此改裝后如果在原車分動器位置安裝電機,需考慮涉水時對電機的防水保護。
2.2電池參數匹配
電池參數主要指電壓等級、功率、電池荷電狀態(SOC)。一般考慮以下原則:電壓等級要與電力系統電壓等級和變化范圍一致;最大充電和放電功率滿足電機的功率要求;SOC應用范圍。
電池需滿足峰值放電和持續放電續駛里程需求,峰值放電為22kW,持續放電為12kW,按照峰值放電10C計算,持續放電5C計算,需要不小于2.89kW·h,電壓等級為288V,則需要10.03A·h。
選擇比能量和比功率高,循環壽命長的10A·h、288V鋰離子電池。
2.3發電機參數匹配
發電機需滿足對電池充電和整車低壓電氣供電需求,整車電氣用電量按0.6kW計算,按照以上匹配電池容量,充電時間和發電機功率關系如表5所示(SOC可用范圍按0.2~0.9計算)。

表5 發電機參數匹配
表5 發電機參數匹配
選擇3.5kW發電機,充電時間約為45分鐘。
2.4校核計算
2.4.1軸荷校核
混合動力汽車改制增加了電機、電池及相關附件重量,減掉原車分動器,可認為分動器與電機及減速裝置等重,因此增加電池重量和電機控制器重量,且分布在后軸上方,按10A·h、288V計算,電池質量為60kg,電機控制器質量為15kg。軸荷變化見表6。
2.4.2傳動軸及半軸轉矩校核
改裝后的前后軸傳遞轉矩均小于原車,所以原車傳動軸和半軸可延用見表7。

表6 載荷校核

表7 傳動軸校核
3 仿真分析
電機的可驅動車速范圍為0~40km/h。軸間耦合四輪驅動,可通過控制電機驅動力實現軸間驅動力分配功能,從而實現牽引力控制,有效防止車輪發生滑轉,最大程度利用地面附著力,改善低速越野性能,包括整車通過低附著路面的能力和爬坡能力。
混合動力模式下,可將發動機控制在其經濟轉矩曲線附近運行,通過電機的削峰填谷作用實現較好的燃油經濟性。
改裝前后加速時間分析見圖9。
原車加速時間為兩驅時取得,0~100km/h為23.28s,改裝后四驅模式下,低速電機參與助力,0~100km/h加速時間為20.79s,較原車有所改善。

圖9 加速時間仿真
改裝前后最高車速均為142km/h,改裝后最大爬坡度為60%。
綜合以上計算,性能匹配結果如表8所示。

表8 性能匹配結果
4 結論
按照動力性和經濟性要求設計軸間耦合越野汽車混合動力方案,通過對驅動電機、動力電池、發電機等進行參數匹配和部件選型,以及對軸荷、傳動軸和半軸轉矩進行校核,仿真結果表明設計方案滿足改制要求,增強了動力性和通過性,同時提高發動機的工作效率和能量利用率,達到一定的經濟性。
1陳家瑞.汽車構造(第五版)[M].北京:人民交通出版社,2006
2余志生.汽車理論(第五版)[M].北京:機械工業出版社,2009
3胡驊.電動汽車(第二版)[M].北京:人民交通出版社,2006
4阿爾弗雷德·克拉普爾.起動機-發電機一體化技術(ISG)[M].北京:北京理工大學出版社,2008
5黃永安.MATLAB7.0/Simulink6.0建模仿真開發與高級工程應用[M].北京:清華大學出版社
4WDHEV Powertrain System M atching Research
W ang Huijing,M a Zhongm in,Hu Dongfang,GuoW anchao
Beijing Automotive Technology Center(Beijing,101300,China)
A parallel cross-axis 4WD HEV based on the conventional 4WD vehicle is developed by removing the power divider,adding the drive motor,power battery etc.Applying MATLAB to achieve powertrain optimization design and thematching calculation,through axles load torque analysis,the hybrid performance scheme is realized.Simulation results show that the research improves the dynamic performanceand economicalefficiency,conforms to the4WDHEV design objects.
4WDHEV,Cross-axis,Powertrainmatching,MATLAB simulation
U469.3
A
2095-8234(2015)01-0077-07
王慧晶(1984-),女,高級工程師,碩士研究生,主要研究方向為整車性能研究及混合動力汽車開發。
(2014-12-12)
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
