基于ADAM S的FSAE賽車雙橫臂前懸架的優化*
2015-07-22 09:44:58李耀平胡立偉昆明理工大學交通工程學院云南昆明650500
小型內燃機與車輛技術 2015年2期
程 浩 李耀平 龔 航 胡立偉(昆明理工大學交通工程學院 云南 昆明 650500)
基于ADAM S的FSAE賽車雙橫臂前懸架的優化*
程浩李耀平龔航胡立偉
(昆明理工大學交通工程學院云南昆明650500)
摘要:依據UG軟件建立FSAE“KMUST”賽車三維視圖模型,獲得雙橫臂前懸架的硬點坐標,利用多體動力學仿真軟件ADAMS中Car模塊建立雙橫臂前懸架模型并進行左右車輪平行跳動仿真試驗。分析仿真結果,確定需要優化的前輪定位參數,將需優化的參數設定為優化目標,利用ADAMS/ Insight模塊對設計目標進行靈敏度分析,優化靈敏度較高的因素。對比優化前、后的試驗結果,證明優化后懸架的運動學特性得到提高。
關鍵詞:FSA E雙橫臂前懸架A D A M S 優化仿真
引言
中國大學生方程式汽車大賽旨在由各大學車隊的本科生和研究生構想、設計、制造,開發完成一輛小型方程式賽車并參加比賽。賽車必須在加速、制動和操控性方面具有非常優秀的表現,同時又必須具有足夠的耐久性以順利完成規則中提及的及比賽現場進行的所有項目[1]。賽車對操縱穩定性的要求很高,所以在賽車設計過程中,必須充分考慮賽車的操穩性。懸架運動學要揭示的是車輪在上下運動過程以及轉向運動過程中,懸架的評價參數隨車輪運動的關系[2]。本文研究懸架基本性能評價參數包括車輪前束角、車輪外傾角、主銷后傾角和主銷內傾角,其主要功能是保證轉向輕便性和車輛直線行駛穩定性,同時車輪的前束角和外傾角的合理搭配可以減輕輪胎的磨損。本文對昆明理工大學KMUST車隊2014年賽車進行ADAMS仿真分析,找出不合理的硬點并對其進行優化,為2015年賽車的懸架設計提供參考。
1 前懸架前輪定位
前輪定位包括:前輪前束角ε、前輪外傾角α、主銷后傾角γ及主銷內傾角β。如圖1所示,前束角ε的作用是消除汽車在行駛過程中因車輪外傾而使兩車輪向外擴張的不利影響,使前輪基本上平行地向前滾動。汽車行駛過程中,前束角ε變化范圍過大,輪胎會發生磨損不均勻狀況縮減輪胎使用壽命。主銷后傾角γ和主銷內傾角β都能夠保持賽車在直線行駛時的穩定性,使汽車轉向自動回正。但主銷后傾角γ的回正作用與車速有關,而主銷內傾角β的回正作用幾乎與車速無關。高速時γ的回正作用起主導作用,低速時β起回正作用。所以,賽車在運動過程中,主銷后傾角γ和主銷內傾角β變化范圍過大會導致賽車手難以操控車輛從而造成危險。
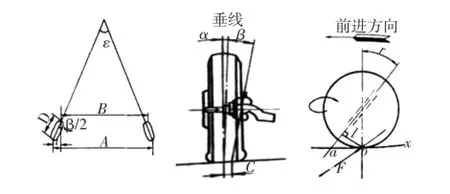
圖1 前輪定位角
2 前懸架仿真模型的建立
FSAE賽車前懸架一般包括上橫臂、下橫臂、推桿、車輪、立柱、轉向橫拉桿、減震器和導向塊。根據昆明理工大學KMUST車隊成員2014年已經創建好的UG三維視圖模型測得前懸架各個主要硬點坐標,如表1所示。與表1各硬點相對應的懸架拓撲結構,如圖2所示。
根據以上前懸架硬點坐標和拓撲機構,在ADAMS/Car中建立模型,再依照圖3所示各機構之間的運動學約束,對模型添加約束。并對ADAMS/Car中建立的模型進行裝配,裝配模型如圖4所示。
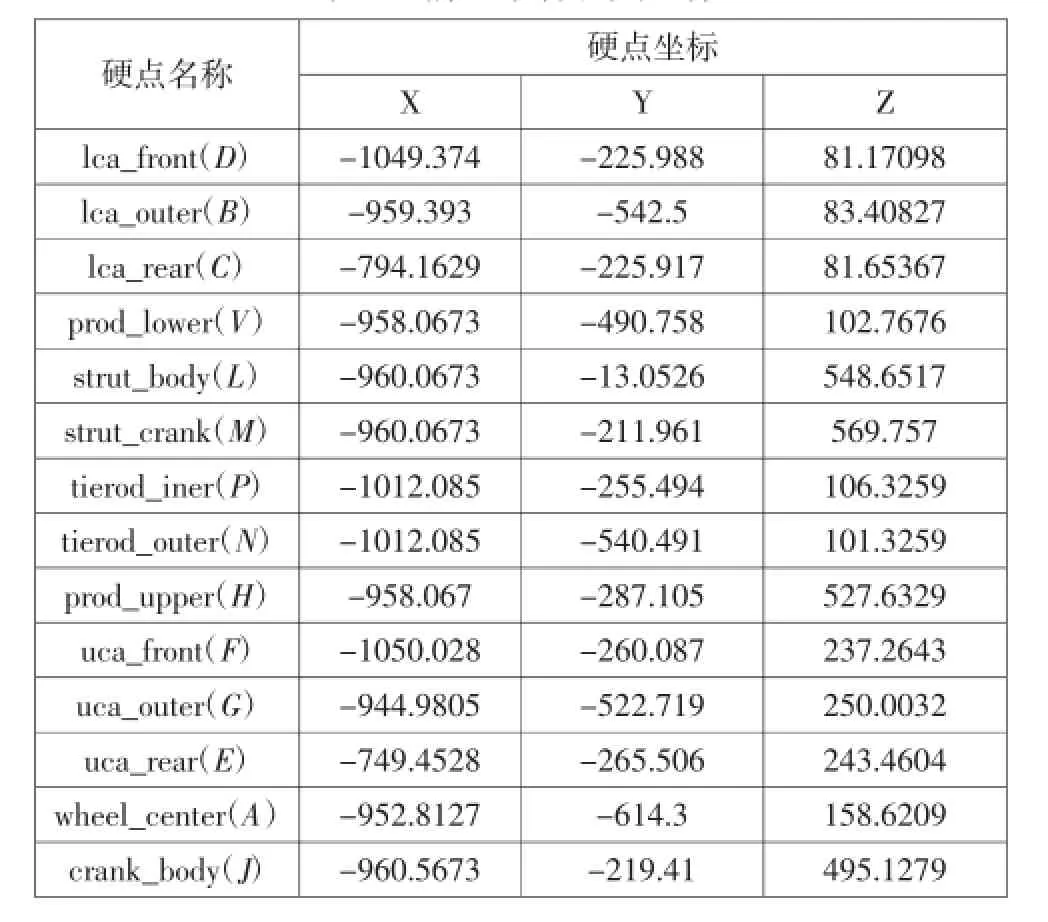
表1 前懸架各硬點坐標
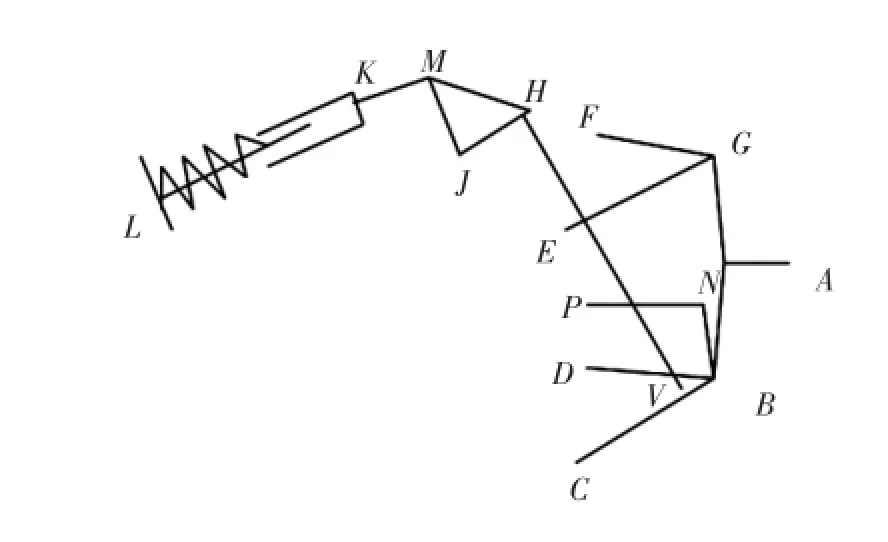
圖2 前懸架拓撲結構
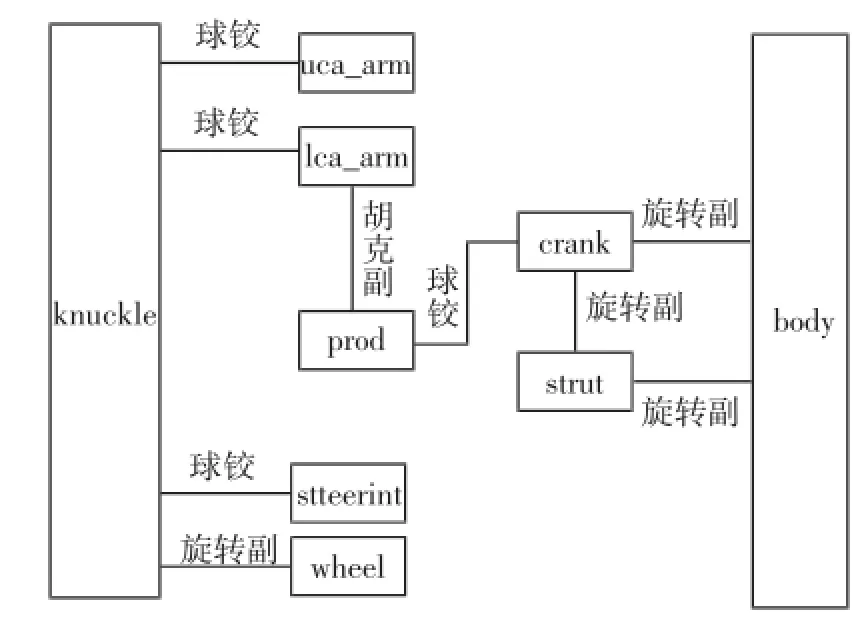
圖3 前懸架運動學框圖
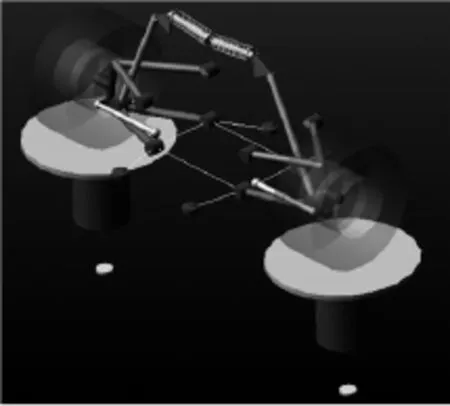
圖4 前懸架仿真模型
3 前懸架仿真分析
在ADAMS/Car的仿真模型建立完成后,可以通過模塊中提供的懸架仿真實驗臺加載各種載荷來模擬懸架實際運動工況。本文采用分析懸架特性最基本同時也是最常用的仿真方法,即左右車輪平行跳動仿真(ParallelWheel Travel)。在仿真之前應設定FSAE賽車的懸架參數,包括簧上質量、輪距、質心高度、輪胎剛度等和車輪定位參數,包括前束角、外傾角、主銷內傾角和主銷后傾角。大賽規則要求賽車輪胎上下跳動行程為25 mm。根據賽車實際運行情況,選擇前輪跳動行程為30 mm。仿真結束后,在ADAMS后處理模塊ADAMS/Post Processor中查看各車輪定位參數隨車輪上下跳動的變化情況[3]。
3.1前束角與車輪上下跳動的關系
為了使汽車有好的操縱穩定性,對于前輪,束角的設計應是在車輪向上運動過程中,由零值向負值方向變化[2]。圖5為前束角隨車輪跳動變化曲線。如圖所示,車輪在上下跳動過程中,前輪前束角變化范圍為-0.5808°~1.4529°,變化量為2.0337°,變化范圍較大,可能會引起賽車的側傾和偏擺,需要對其進行化。
3.2前輪外傾角與車輪上下跳動的關系
外傾角在車輪跳動過程中產生變化會影響車輛的穩態響應特性以及直行穩定性。外傾角的設計通常是,在車輪向上運動時,前輪外傾角逐漸減小,而在向下運動時朝正值方向變化,并且在整個運動過程中變化不要大[2]。如圖6所示,車輪在30mm跳動行程內上下平行跳動時,前輪外傾角在-0.1672°~-0.7572范圍內變化,變化了0.59°。變化量較小,屬于理想狀態,無需對其進行優化。
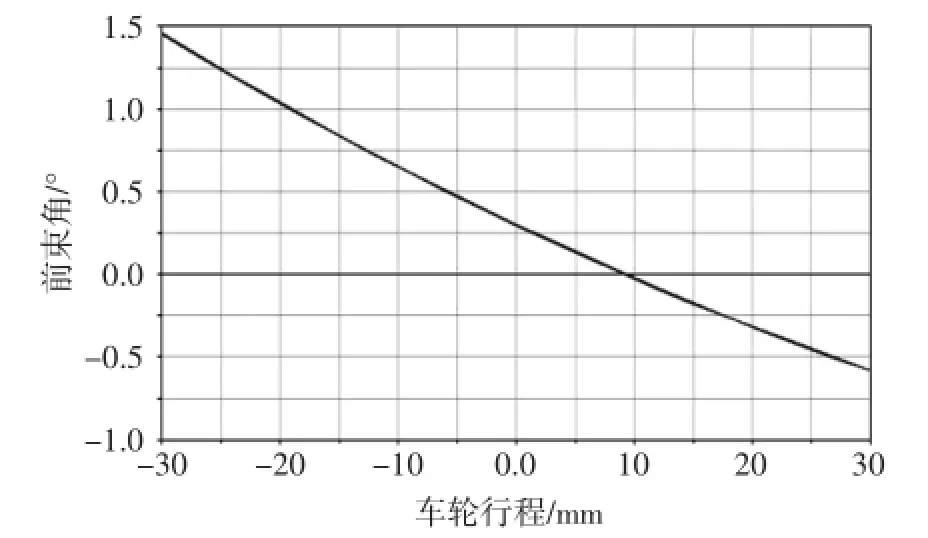
圖5 前束角隨車輪跳動變化曲線
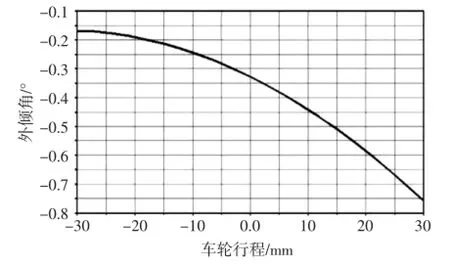
圖6 外傾角隨車輪跳動變化曲線
3.3主銷后傾角與車輪上下跳動的關系
具有合適的主銷后傾角使賽車具有一定的穩定力矩,既能保證賽車穩定直線行駛又能保證賽車手施加適當的力就可以克服此穩定力矩,轉向比較輕便[4]。由圖7可以看出主銷后傾角數值的變化范圍為4.4397~5.0559°,變化幅度為0.6162°。可以進一步優化。
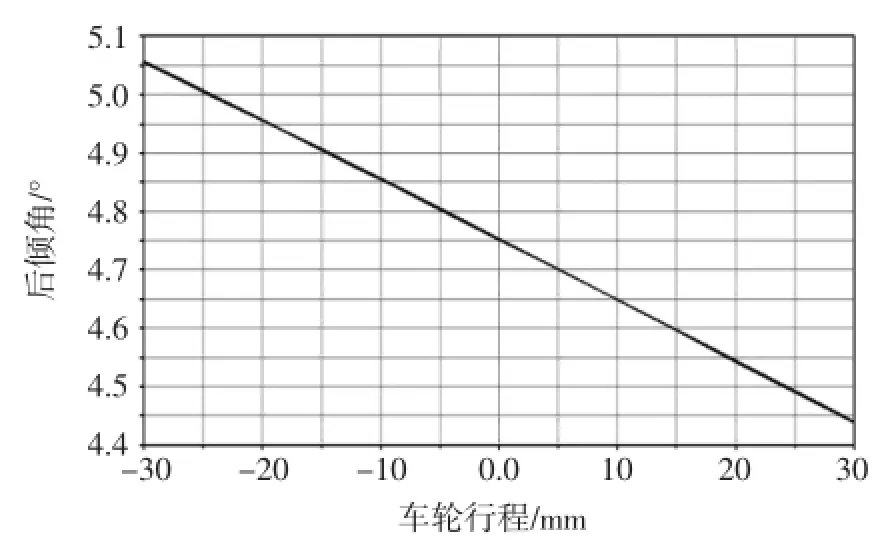
圖7 主銷后傾角隨車輪跳動變化曲線
3.4主銷內傾角與車輪上下跳動的關系
主銷內傾角具有使汽車車輪自動回正的作用,變化范圍不應過大或過小,否則會出現輪胎磨損的情況且不利于汽車的操縱穩定性。主銷內傾角隨車輪上小跳動情況如圖8所示,即在整個跳動過程內傾角的變化由6.8135°到7.5691°。變化范圍非常小,符合設計要求。
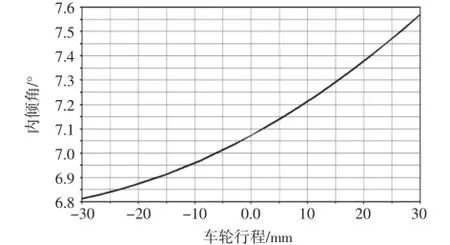
圖8 主銷內傾角隨車輪跳動變化曲線
4 前懸架優化分析
通過對前懸架的仿真分析,得出各前輪定位參數隨輪胎上下跳動的變化規律。由此得知,前束角和主銷后傾角的數值隨車輪上下跳動變化較大,前輪外傾角與主銷內傾角隨車輪跳動變化范圍較小。運用ADAMS/Insight模塊對前懸架進行優化以達到減小前輪定位參數的變化范圍和提高賽車操縱穩定性的目的。
ADAMS/Insight模塊可用于前懸架多目標優化試驗設計及試驗結果統計分析,則優化目標的性能可由以下綜合目標函數表示。

式中:f(Yj)為優化目標(j=1,2,3…m);Yj是設計變量;n為設計目標數目;i——計算方程。
4.1前懸架參數靈敏度分析
系統的參數靈敏度是系統的參數變化對系統性
i=1能影響程度大小的指標。為了有效地進行參數的優化設計與修改,需了解哪些設計變量對目標函數的影響最大,即研究目標函數對設計變量的敏感程度[5]。導數計算是靈敏度分析理論方法的基礎,若目標函數可導,其一階靈敏度在連續系統可表示為[6]:

其中:f(X)是目標函數,Xi是設計變量。
由于前束角和主銷后傾角數值變化范圍較大,故選擇這兩個參數為設計目標。考慮到整車的布置和懸架的安裝,選取上、下橫臂與車架的鉸接點和轉向橫拉桿外點為設計變量。轉向橫拉桿外點的確定可對立柱的設計提供參考。經試驗發現,各點的X軸坐標值的變化對目標函數的影響很小,故選擇這五個點的Y值和Z值為設計變量。為了避免桿件之間的干涉,通常設置設計變量的變化范圍為-5 mm~ 5 mm。試驗分析的結果可以以網頁的形式查看和保存。分析結果顯示了因素的靈敏度,其中正值表示正效應即設計目標隨著設計變量的變大而變大,負值則表示設計目標隨著設計變量的增大而變小[4]。圖9和圖10為各坐標值對前束角與主銷后傾角的影響大小。

圖9 設計變量對前輪前束角的影響
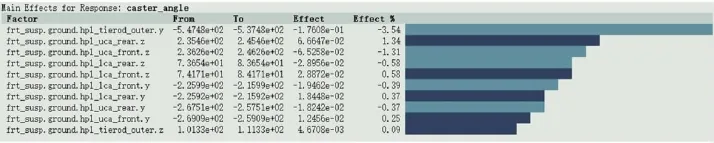
圖10 設計變量對主銷后傾角的影響
根據分析結果,轉向橫拉桿外點對目標函數都有很大影響,盡量避免修改。根據影響效果,確定對上擺臂與車架相連的前后鉸接點Z軸坐標和橫拉桿外點Z軸坐標進行修改。如表2所示為設計變量的修改。
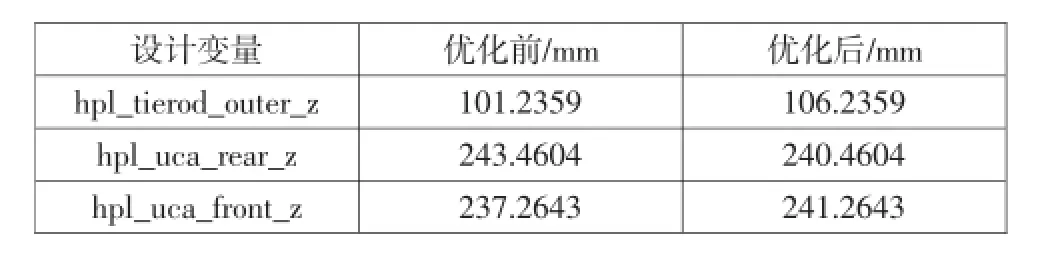
表2 設計變量的優化
4.2優化前后結果對比
圖11和圖12分別為優化前后設計目標變化對比圖,實線為優化前輪胎平行上下跳動的仿真曲線,虛線為優化后的仿真曲線。由圖可知優化后的目標函數變化范圍明顯變小,其中前束角變化范圍為0.9652°,更有利于車輪平行的向前滾動。主銷后傾角變化范圍為0.1276°,車手更易控制賽車。所以優化后的前懸架得到一定的改善,更有利于賽車的操縱穩定性。
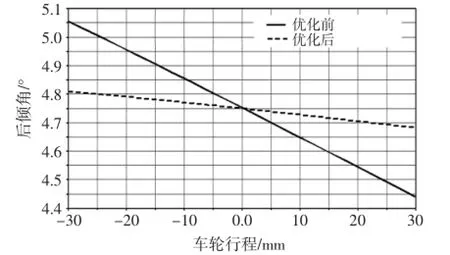
圖11 優化前后主銷后傾角變化曲線
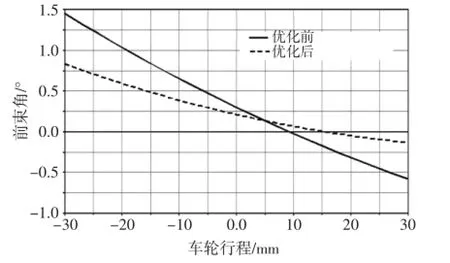
圖12 優化前后前束角變化曲線
5 結論
利用ADAMS/Car建立FSAE前懸架模型并進行左右車輪平行跳動仿真試驗,結果顯示前懸架前束角和主銷后傾角變化范圍較大,需對其進行優化。利用ADAMS/Insight對上述兩設計目標進行優化試驗,根據參數靈敏度試驗結果確定需進行優化的設計變量,即上擺臂與車架相連的前后鉸接點Z軸坐標值與橫拉桿外點Z軸坐標值。優化后的試驗結果表明,前束角數值和主銷后傾角數值變化范圍分別為-0.1322°~0.833°與4.6828°~4.8104°,變化幅度明顯變小。達到優化的目的,前懸架的性能得到一定的提高。
參考文獻
1李理光.中國FSC大賽規則 [M].中國大學生方程式汽車大賽規則委員會,2014
2高晉.基于虛擬樣機技術的懸架K_C特性及其對整車影響的研究[D].長春:吉林大學,2010
3陳志偉,董月亮.MSCAdams多體動力學仿真基礎與實例解析[M].北京:中國水利水電出版社,2012
4李嫚.FSAE賽車懸架的優化設計及分析 [D].哈爾濱:哈爾濱工業大學,2011
5雷雨成,李峰.橡膠襯套剛度對懸架系統影響的研究[J].上海汽車,2004(11):30,31,34
6趙振東,雷雨成,袁學明.汽車懸架橡膠襯套剛度的優化設計[J].機械科學與技術,2006,25(2):168~170
7關文達.汽車構造[M].北京:機械工業出版社,2012
中圖分類號:U463.1
文獻標識碼:A
文章編號:2095-8234(2015)02-0066-05
收稿日期:(2015-01-21)
*基金項目:賽車底盤系統優化設計(6493-20140069),交通運輸云南省專業綜合改革試點項目(10968-76)。
作者簡介:程浩(1990-),男,碩士研究生,研究方向為汽車系統動力學。
Optim ization Analysisof Double-W ishbone Front Suspension Parameter of FSAERacing Car w ith ADAM S
Cheng Hao,LiYaoping,Gong Hang,Hu Liwei
Kunming University of Scienceand Technology(Kunming,Yunnan,650500,China)
Abstract:3D UGmodel of FSAE“KMUST”racing carwas designed.The key hard point coordination of the front suspension was obtained.Themulti-body dynamic model of double-wishbone front suspension was established based on ADAMS/Car.According to ParallelWheel Travelsimulation test,the frontwheel position parametersneeded tobe optimizedwereascertained.Then the influence factorsof these parameters sensitivity were analyzed by using ADAMS/Insight.Contrasting the resultwith the former proves that the kinematicscharacteristicsof the frontsuspensionwere improved. Keywords:FSAE,Double-wishbone frontsuspension,ADAMS,Optimization,Simulation