兩種車輛懸架系統的建模與控制仿真*
2015-07-24 19:01:22牟韻文翟江濤
網絡安全與數據管理 2015年23期
牟韻文,潘 明,蘇 雪,翟江濤
(桂林電子科技大學 電子工程與自動化學院,廣西 桂林 541004)
兩種車輛懸架系統的建模與控制仿真*
牟韻文,潘 明,蘇 雪,翟江濤
(桂林電子科技大學 電子工程與自動化學院,廣西 桂林 541004)
車輛懸架系統作為汽車的一個重要組成部分,其性能好壞會影響到車輛的平順性與穩定性。以1/4車輛模型為例,從被動懸架到主動懸架,將車輛懸架系統動力學原理與MATLAB仿真軟件相結合,即首先利用動力學理論建立其數學模型,然后在仿真軟件中建立其相對應的模型進而動態仿真,最后對比結果。實驗結果表明,在車輪動載荷大致相同的條件下,設計的主動懸架有效地降低了車體的垂直加速度,與被動懸架相比,優化了約17%,提高了車輛在行駛過程的平順性和駕駛的穩定性。
車輛;懸架系統;建模;控制仿真
0 引言
隨著社會經濟的發展,人們的生活水平日益提高。越來越多的個人、家庭擁有了屬于自己的汽車。乘坐汽車時,人們對于坐車舒適感的要求日漸提高,所以車輛在行駛時的平順性和操縱的穩定性開始被更多專家所關注。傳統意義的汽車懸架系統多為被動懸架系統,其彈簧剛度和減震器阻尼系數是固定而不能改變的,這樣的被動懸架系統很難適應人們乘坐汽車舒適性的要求。為使車輛懸架系統在不同路面的激勵作用和在不同行駛速度等外在條件的影響下,其操縱穩定性和行駛平順性受到的影響較小,各種新型懸架系統正在成為研究的熱門,出現了一系列的懸架系統的減振控制技術,包括半主動懸架系統和主動懸架系統[1]。
懸架系統包括彈性元件、減振器、導向機構以及橫向穩定器等部分。它的主要功能是將車身與車軸由彈性元件連在一起。導向裝置的功能是傳遞系統間的各種力,減震器用來減小車身和輪胎之間摩擦振動能量,保證車輛在行駛過程中的安全,增強乘坐汽車的舒適感。彈性元件用來緩沖外界環境對車體引起的振動,吸收振動的能量[2]。總之,這些機構都是為了使車輛的平順性達到最佳狀態。
在懸架系統的仿真中,普遍采用建立數學模型的方式,所謂的數學模型就是在物理系統和數學方程間設立一套完整的規則,數學模型研究方法比較多樣,周期短,成本低。隨著現代計算機技術的發展,處理數學模型的手段有了較大突破,可以把若干個參數和運動方程進行互相聯系[3-5]。 以車輛的 1/4模型為例,建立被、主動懸架數學模型,然后進行仿真實驗。
1 車輛懸架系統模型
汽車是較復雜的系統,在分析復雜系統時,次要問題可以忽略,將模型進行簡化。為便于分析,采用1/4車輛模型,其簧載質量為mv,包括車體、車架及其以上部分的總重。懸架通過減振器和彈簧元件與車軸、輪胎相連接。輪胎和車軸構成的非懸架的質量為ml。
在模型中,考慮人們乘坐汽車的舒適性,即車輛的平順性,在分析車體質量時,主要考慮垂直、俯仰、側傾三個自由度。將車輛簡化為1/4模型時,車身只具有垂直的自由度,這個自由度的振動對車體的平順性影響較大,可以將車輛簡化成兩自由度模型。
此模型中,車胎的阻尼較小,暫且不予考慮,簡化后1/4模型如圖1、2所示。圖中車體的總重為mv,車胎的質量為ml,被動懸架剛度為 ks,被動懸架阻尼系數為 cs,車胎的剛度為 kt,簧載質量位移為 xv,非簧載質量位移為 xl,路面不平整度的位移為 xn, 白噪聲信號輸入為w(t),主動懸架的制動力為 U(t)。
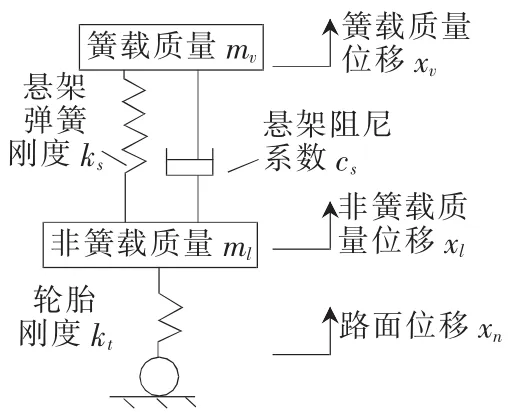
圖1 被動懸架模型
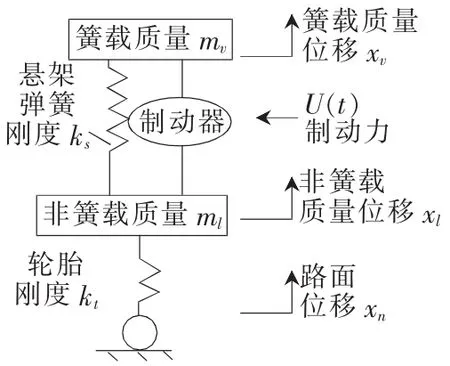
圖2 主動懸架模型
1.1 車輛被動懸架仿真模型的建立
圖1所示的被動車輛懸架模型,根據牛頓定律,建立被動懸架系統的運動微分方程,即:

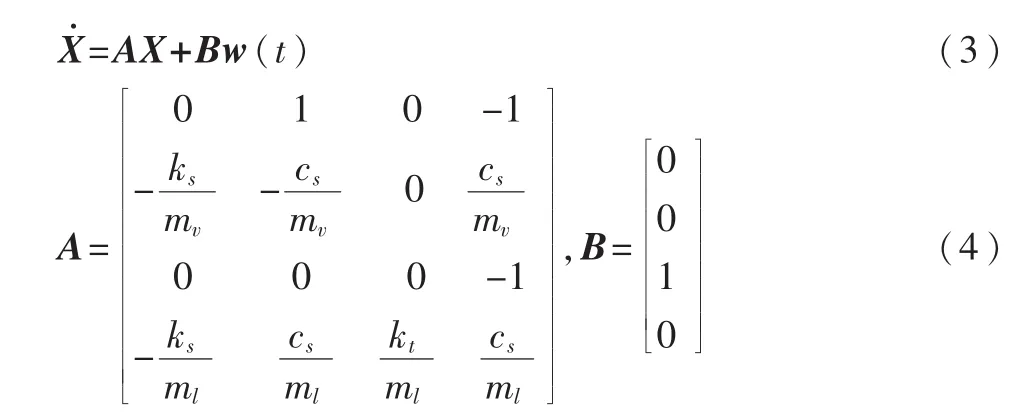
測試車輛懸架性能,主要從該懸架系統對車輛的平順性和駕駛的穩定性的影響來考慮,主要涉及 3個參數:ya==,代表車身加速度(ACC);yb=xv-xl=xa,代表懸架的動擾度(SWS);yc=xn-xl=xc,代表輪胎動載荷(DTL)。
輸出向量U=-KX。由式(1)、(2)得出系統的輸出方程為:

其中,

1.2 車輛主動懸架仿真模型的建立
主動懸架與被動懸架的區別在于前者除了具有彈性元件、減振器之外,在車體與車軸之間還安裝有制動器,可以調節對汽車的簧載質量和非簧載質量的力,從而加強車輛的平順性和操作的穩定性。
車輛主動懸架模型的運動方程即:

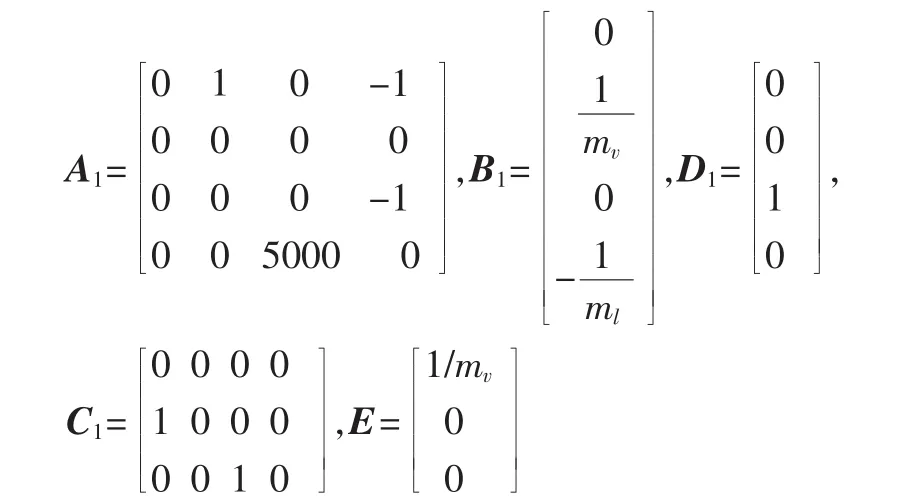
選取各狀態變量為 xa=xv-xl,xb=,xc=xn-xl,xd=,輸入各狀態變量為:X=[xa,xb,xc,xd]T,輸出變量為,ya=,yb=xv-xl,yc=xn-xl,系統的狀態方程和輸出方程即:

其中:
對于被動懸架和主動懸架,選取狀態變量,建立被、主動懸架的狀態方程,可以較好地反映懸架系統的運動特性,輸出變量也可以反映駕駛車輛的平順性和操縱性。
2 車輛懸架系統仿真實例計算
在 MATLAB/Simulink中建立 1/4車輛懸架的計算機仿真模型,然后進行被動懸架和主動懸架的性能分析。以某轎車的后懸架為例,計算各輸入參數,如表1所示。
2.1 被動懸架系統仿真
對于被動懸架模型,將各參數代入被動懸架系統方程,在 MATLAB中輸入命令[z,p,k]=ss2zp(A,B,C,D),求出被動懸架系統的閉環特征根:
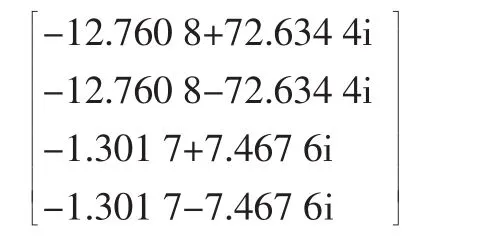

表1 仿真車輛模型輸入參數值
極點均位于左半平面,該系統為最小相位系統,車輛被動懸架系統是穩定的。
2.2 主動懸架系統仿真
對于主動懸架模型,需要獲取系統的制動力。先求出系統的狀態變量 X,求出反饋系數 K,將二者相乘,得到制動力U。為使系統可以快速響應,控制信號的加權系數 R取 1,qa=80 000,qb=5,所以 Q=[80000 0 0 0;0 0 0 0;0 0 5 0;0 0 0 0],在MATLAB中輸入命令[K,P,E]=LQR[A1,B1,Q,R],可得:
K=[282.84 424.83 -277.37 -4.01]
原狀態方程可以寫成:

將各參數代入主動懸架方程,在MATLAB中輸入命令[z,p,k]=ss2zp(A,B,C,D),可以求出主動系統的閉環特征根:
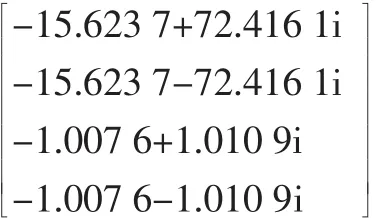
極點均位于左半平面,符合系統穩定的條件,車輛主動懸架系統是穩定的。
2.3 仿真分析與對比
在MATLAB/Simulink建立被動懸架模型和主動懸架模型的計算機仿真示意圖如圖3、4所示。
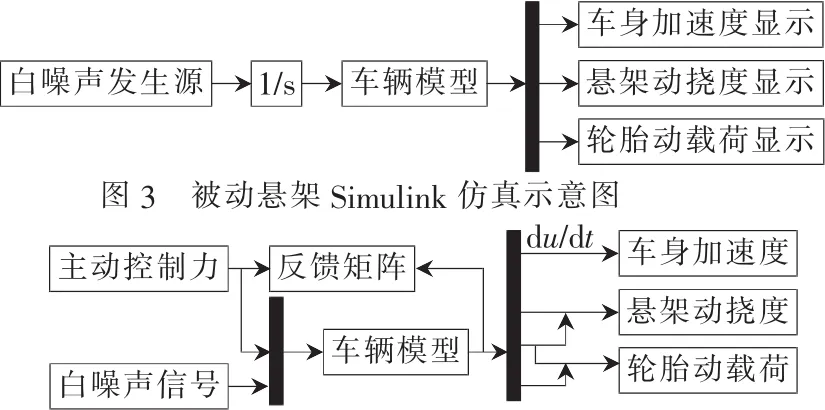
圖4 主動懸架Simulink仿真示意圖
模擬路面時,白噪聲信號作為路面不平整度的輸入。仿真模塊輸入為有限帶寬白噪聲,經過一次積分后可得到仿真路面。
人體在感知車輛的平順性和舒適性時,體現在對車體本身振動的頻率的感受,即車身加速度。車輛被、主動懸架系統仿真時域變化曲線如圖5~圖7所示。圖5所示為車身加速度,圖6為懸架動撓度,圖7為輪胎動載荷。
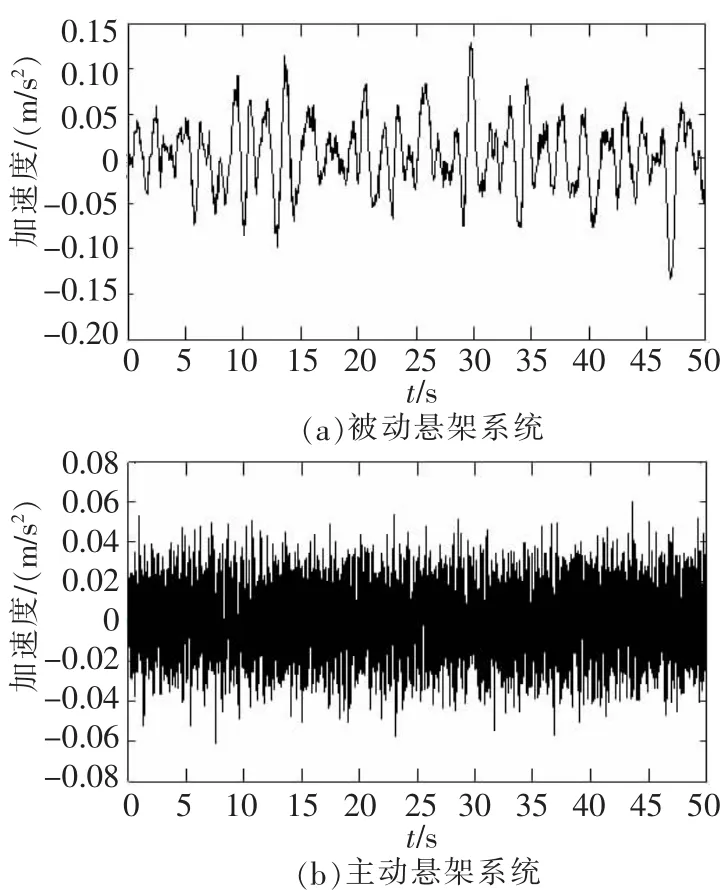
圖5 車身加速度
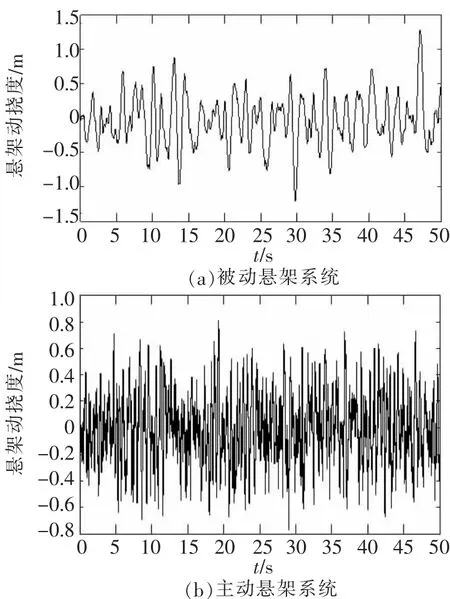
圖6 懸架動撓度
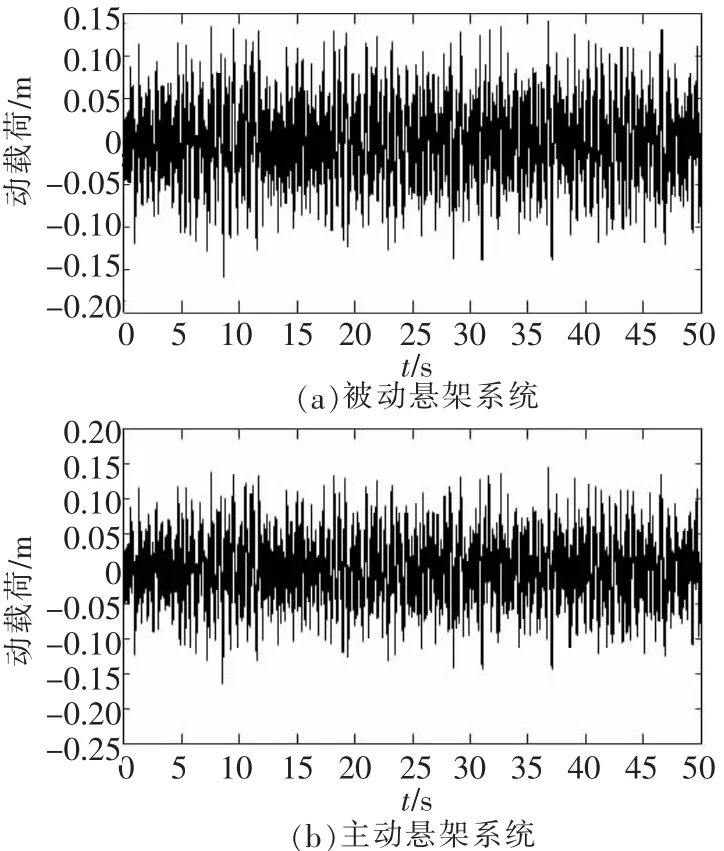
圖7 輪胎動載荷
仿真條件下,將車輛被、主動懸架系統作對比。計算出兩個系統的性能指標的均方根值如表2所示。
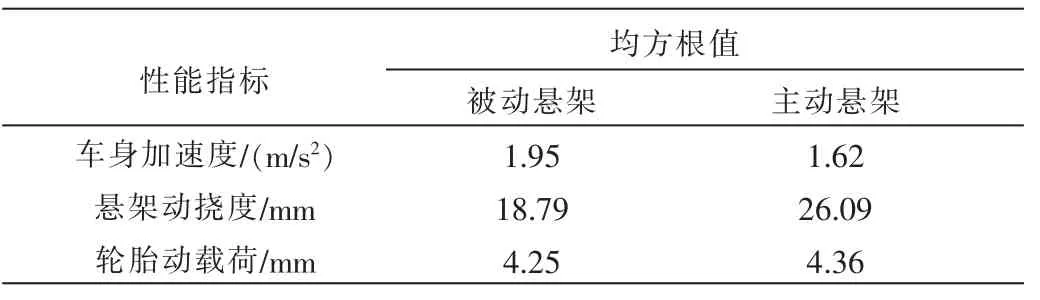
表2 兩個系統的性能指標的均方根值對比
由表2可以看出,在車輪動載荷基本相同的情況下,所設計的車輛主動懸架降低了車身加速度,與被動懸相比較,其均方根值減少了 17%,懸架動撓度也較好地控制在可接受的范圍之內。結果表明車輛的平順性和穩定性有一定的提高。人們乘坐車輛的舒適性可有較好的改善。
3 結束語
懸架系統是連接車身與車輪之間所有傳遞力裝置的總稱,其性能的好壞關乎汽車的操縱穩定性和行駛的平順性,設計性能較好的懸架系統已成為現代車輛研究的關鍵。傳統的設計方法,汽車懸架系統設計和開發周期長,且成本高。用計算機輔助設計和控制理論方法來完成懸架系統的設計己成為當今工廠、企業普遍采用且行之有效的方法,可大大節省產品成本。
本文對 1/4車模型被、主動懸架系統進行了分析,對 1/4車模型的被、主動懸架系統進行數學模型的推導以及仿真模型的建立。主動懸架相對于被動懸架系統主要區別在于主動控制器的設計,本文主要依據最優控制原理,對 1/4車模型主動懸架控制器來進行設計,使其性能相對于1/4車模型被動懸架系統有較大的改善。從仿真實驗結果來看,主動懸架的各項性能指標均優于被動懸架。
[1]張海濤.基于半車模型的主動懸架控制器設計與仿真[D].蕪湖:安徽工程大學,2012.
[2]王望予.汽車設計[M].北京:機械工業出版社,2000.
[3]孫義杰,巢凱年.ADAMS/VIEW在汽車前懸架仿真應用及優化分析[J].西華大學學報,2005,24(6):13-17.
[4]孫殿柱,王豐元.當前 CAD技術的發展趨勢[J].機械,1998,25(6):47-48.
[5]曹觀波.汽車前懸架系統建模仿真與分析[D].長春:吉林大學,2012.
Simulation and modeling of two kinds of vehicle suspension system
Mou Yunwen,Pan Ming,Su Xue,Zhai Jiangtao
(School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004,China)
The suspension system of vehicle is an important part of the car.As an important component of automobiles,suspension system′s performance has a great impact on automobile′s steering stability and performance.Taking a wheel of the car for example, the research was carried out in this paper from passive suspension to active suspension.Meanwhile, the method of connecting automobile′s principle of dynamics to simulation software was taken.Firstly,mathematical model of the automobile was built using dynamic principle.Then its corresponding simulation model and dynamic simulation were set in the simulation software,compared the simulation results in the end.The experiment result shows that active suspension reduces the vertical accelerated speed in roughly the same condition of the dynamic load.Compared to the passive suspension,its result optimizes about 17%and it increases the smoothness of the vehicle considerably.
vehicle;suspension system;modeling;control simulating
U461.1
A
1674-7720(2015)23-0073-03
牟韻文,潘明,蘇雪,等.兩種車輛懸架系統的建模與控制仿真[J].微型機與應用,2015,34(23):73-75,79.
2015-08-11)
牟韻文(1987-),男,碩士研究生,主要研究方向:汽車電子,計算機仿真,控制科學研究。
廣西區自然科學基金項目(2014GXNSFAA118377);廣西研究生教育創新計劃項目(GDYCSZ201424)
潘明(1957-),通信作者,男,研究生導師,副教授,主要研究方向:EDA技術和嵌入式系統,汽車電子技術,信號測試與處理。E-mail:pan_m@qq.com。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37