聲發射與EMD在滑動軸承狀態檢測中的應用
2015-07-25 07:33:00蘇一鳴盧緒祥唐晟琨吳家騰
軸承 2015年3期
蘇一鳴,盧緒祥,唐晟琨,吳家騰
(長沙理工大學 能源與動力工程學院,長沙 410114)
滑動軸承是汽輪機等大型旋轉機械的關鍵支承部件,由于支承的設備龐大且結構復雜,軸承運行時很容易發生故障,從而影響機組的安全穩定運行。滑動軸承故障信號的規律性差且信息分散,診斷難度大。振動分析是目前應用最廣泛的軸承監測和診斷技術,通常應用于20 kHz以下的中低頻范圍,但對于早期微弱故障的特征提取,該方法并不理想。當軸承發生早期碰摩時,振動信號表現不敏感,而且容易與設備其他部件的振動信號混合,不容易判別故障,但此時產生的聲發射信號很明顯,而且其幅值主要與釋放的能量相關。此外,聲發射信號具有較寬的頻率范圍,采用聲發射信號進行故障診斷可以有效避免低頻噪聲的干擾。
經驗模態分解(Empirical Mode Decomposition,EMD)可以把任意一個復雜的信號分解成一系列基于該信號局部特征時間尺度的本征模態函數(Intrinsic Mode Function,IMF),由于IMF取決于信號本身而不是由預先設定的標準決定,因此EMD具有良好的自適應性,處理非平穩信號時非常高效,將EMD與其他技術相結合用于軸承故障診斷可以獲得更好的效果[1-4]。
滑動軸承聲發射信號的產生機理復雜,非線性特性很強,故障狀態難以模擬,很難準確獲取故障信號特征,特別是故障初期信號的微弱變化。因此,使用EMD方法對聲發射進行處理,聯合故障檢測中常用時域統計指標[5],并引入了新參數TALAF和THIKAT[6]。分別計算原始信號和每個IMF在不同潤滑狀態下的各指標值,并進行對比,證明了EMD在滑動軸承聲發射信號應用中的可行性。
1 滑動軸承聲發射信號機理
聲發射是指材料在應力作用下產生變形或裂紋擴展,以局部快速釋放能量形成彈性波的現象。滑動軸承運行中的載荷變化、油溫變化和轉子故障等原因都可能引起軸承潤滑狀態的改變,最終導致軸瓦與軸頸間的油膜破裂,產生較為嚴重的接觸摩擦,這個過程中伴隨著聲發射現象的產生。
流體潤滑狀態下,軸瓦與軸頸完全被油膜分離,兩者間不存在接觸摩擦,由于軸頸旋轉,在潤滑油的剪切力作用下,軸瓦和軸頸的晶格吸收能量,當能量累積到一定程度,晶格發生位錯或滑移就會釋放能量,產生聲發射現象。在干摩擦狀態下,軸瓦與軸頸的表面微凸體發生接觸摩擦,在碰摩力的作用下發生彈性變形或塑性變形,引起內部晶格快速積聚能量后發生滑移或重新排列,并以彈性波的形式釋放一部分能量,產生聲發射信號。半干摩擦狀態是以上2種狀態的混合情況,部分軸瓦與軸頸發生接觸摩擦,在油膜剪切力和碰摩力的共同作用下產生聲發射信號。聲發射信號源自缺陷本身,不同潤滑狀態下所產生的聲發射信號具有不同的特征,因此可以通過聲發射信號對軸承的潤滑狀態進行監測。
2 經驗模態分解[7]
EMD將時間序列信號分解成一組有限的IMF振蕩函數。基于EMD算法,任意原始信號x0(t)都可以重構為固有模式的線性疊加,即

式中:ci(t)為第i個經驗模式,即IMF;rn(t)為殘余分量。IMF必須滿足2個條件:(1)極值點和過零點數量相等或最多相差1;(2)任意時間上,由局部極大值點組成的上包絡線與由局部極小值點組成的下包絡線的平均值為零。
將IMF從原始信號x0(t)抽取出來的算法稱為篩選過程,其包含以下步驟:
(1)初始化定義x(t)=x0(t)和r0(t)=x0(t);
(2)識別x(t)的所有局部極值;
(3)將所有極大值點(極小值點)分別用3次樣條曲線連接起來,形成上包絡線Emax(t)(下包絡線Emin(t));
(4)求取上下包絡線的平均值,得到均值序列m(t)=0.5[Emax(t)+Emin(t)];
(5)定義d(t)=x(t)-m(t),判斷d(t)是否滿足IMF的2個條件,如果不滿足,令x(t)=d(t),重復(2)~(5),直到d(t)滿足IMF條件,記為c1(t)=d(t);
(6)定義x(t)=r0(t)-d(t),r1(t)=r0(t)-d(t),重復以上步驟,依次得到n個IMF,記為c1(t),c2(t),…,cn(t),整個處理過程在滿足預定的篩選停止準則后停止,最后剩下原始信號的殘余分量rn(t)。
篩選停止準則是EMD步驟中非常重要的環節,其決定何時結束篩選過程,從而得到一個新的IMF,并且要避免篩選次數過多導致IMF失去原始單一成分信號的物理意義。目前常用的篩選停止準則有標準差法、S數準則和三參數準則,S數準則和三參數準則的計算效率很高,但IMF的正交性一般,因此選擇計算效率和IMF正交性都相對較好的標準差法。該準則通過限制2個連續處理結果之間的標準差實現,當標準差SD介于0.2~0.3時停止篩選,表示公式為

3 實際應用
3.1 試驗背景
對某電廠310 MW汽輪發電機組的汽輪機低壓缸后軸承進行碰摩試驗[8],記錄了滑動軸承從啟動到高速暖機,并在暖機時發生磨瓦故障,最后打閘停機的全程聲發射信號,試驗過程中采樣頻率為3 MHz,門檻值設置為60 dB,聲發射傳感器型號為SR150M(工作頻率60~400 kHz),利用耦合劑將其直接粘貼在軸承座表面,并用磁性裝置壓緊。
3.2 聲發射信號的EMD應用
試驗過程中采集的信號夾雜著其他部件及環境產生的聲發射信號,EMD運算過程中的擬合過沖和不足、插值誤差等原因也會產生誤差,誤差會在多次迭代中不斷累積,使得信號的分解結果中出現虛假分量,最終IMF可分為噪聲部分、信號部分和趨勢部分。高頻噪聲和低頻虛假分量與原信號的相關性很小,可以通過皮爾遜相關系數R辨別,R取值范圍為[-1,1],絕對值越大表明相關性越強,其數學表達式為

流體潤滑和干摩擦時,聲發射信號的IMF與原始信號的皮爾遜相關系數如圖1所示,相關系數的閾值取0.01。由圖可知,流體潤滑時,聲發射信號經過EMD處理得到的14個IMF中,第1個為高頻噪聲,最后3個為低頻虛假分量,需要濾除;干摩擦時,聲發射信號經過EMD處理得到的15個IMF中,最后5個為低頻虛假分量,經過篩選后,2種狀態下的聲發射信號都保留信號部分的10個IMF。
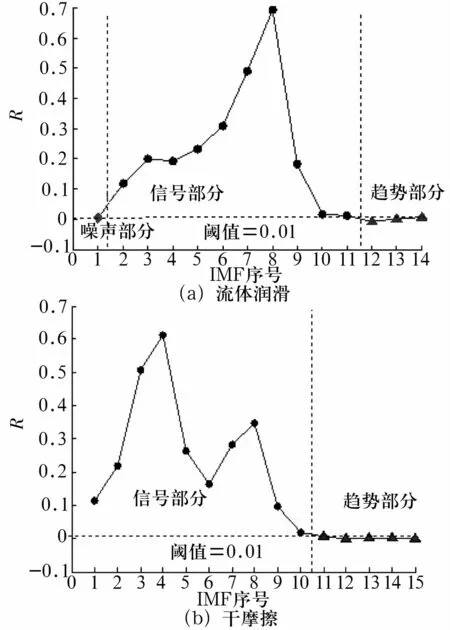
圖1 聲發射信號的IMF識別
聲發射信號經EMD處理后的IMF頻譜圖如圖2所示(僅畫出前5個IMF的頻譜)。聲發射信號本身就是一種能量的釋放,軸瓦和軸頸之間的接觸摩擦,相比金屬和液體之間的摩擦,晶格積聚能量更快更大,產生的聲發射信號頻率更高,由圖可知,相比流體潤滑狀態,干摩擦狀態的IMF峰值頻率更高,說明EMD的處理結果與理論分析結果相一致。
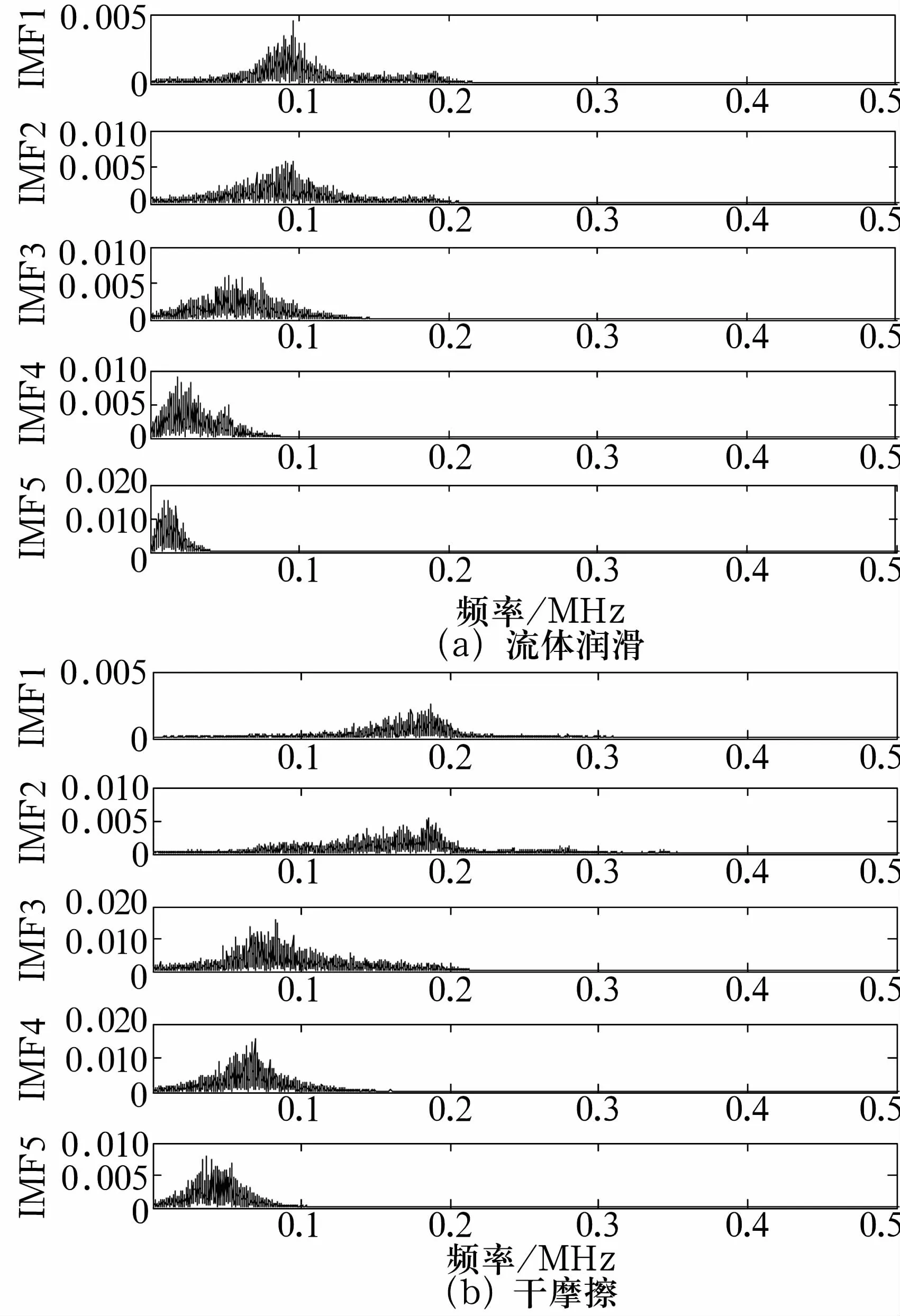
圖2 聲發射信號的EMD應用
3.3 統計指標
用于設備狀態監測的指標必須能夠識別異常變化并持續跟蹤,并且隨時間變化反映故障的出現或加劇。沒有恒定的指標值能夠立即發現任何缺陷,因為任何預警值都不可能獨立于故障性質、機器本身和運行狀況而存在,賦予從時域中提取出來的特征指標一個值,從本質上來說并不重要,但是這個值的變化代表著故障的加劇,因此指標的變化情況比指標值本身重要得多。
在時域分析中,常用于監測軸承狀態的統計指標有K因子KF、峰值Peak、均方根值RMS、峰值系數CF、峭度Kurtosis和偏度Skewness等,當故障發生到一定階段后,峭度、峰值等指標不再單調變化,而均方根則隨著故障加劇而增大,因此引入TALAF和THIKAT這2個新的統計指標[6],其表達式為
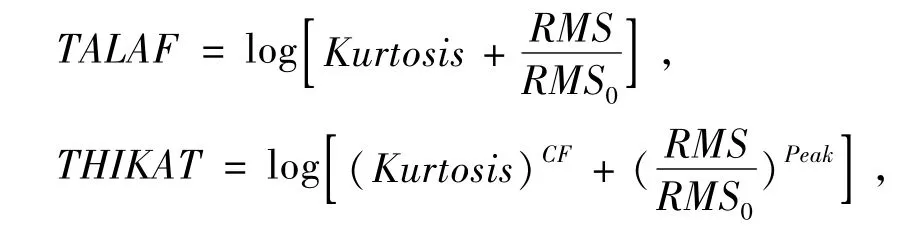
式中:RMS0為流體潤滑聲發射信號的均方根。為監測各指標在不同狀態下的變化程度,使用各指標在潤滑故障和潤滑正常時的比值來進行判斷。

3.4 結果分析
3.4.1 指標對潤滑狀態變化的敏感程度
根據(4)式,計算得到各IMF(淺色)及原始信號(深色)的指標比值,并將8個指標分為2組:第1組是依賴信號能量內容的指標,包括峰值、均方根、峰值系數和K因子;第2組則是依賴于信號幅值分布,對沖擊非常敏感的指標,包括峭度、偏度、TALAF和THIKAT,如圖3所示。由圖可知:
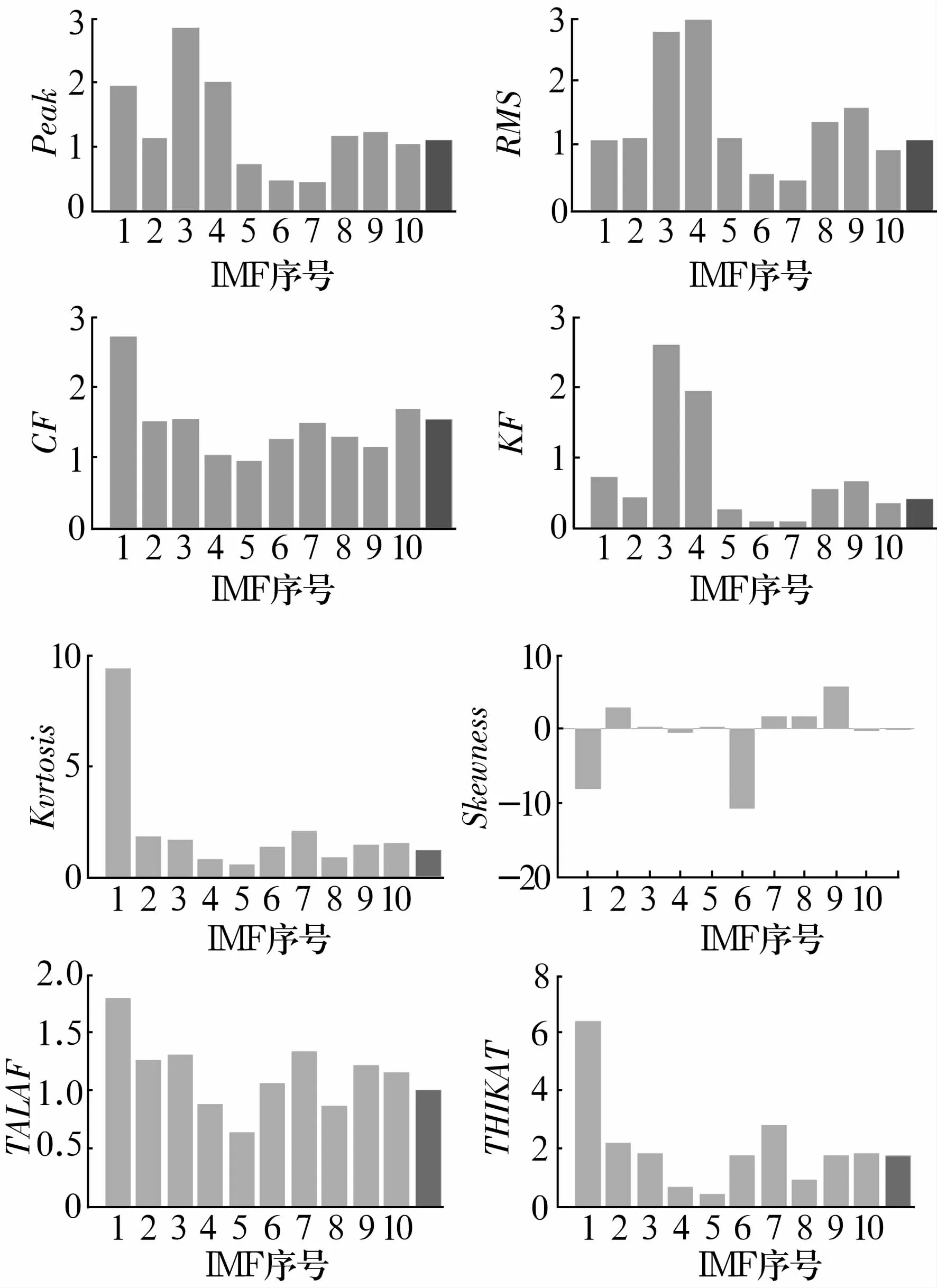
圖3 聲發射信號各指標比值示意圖(2 040 r/min)
(1)原始信號各指標比值大多在1左右,說明在流體潤滑和半干摩擦狀態下,原始信號的各指標值并未發生明顯變化,單從原始信號的指標值變化很難判斷潤滑狀態。
(2)由IMF計算得到的指標值大多數比原始信號的指標值敏感,說明這些指標都對故障檢測有效,但敏感程度有很大區別。
(3)峭度對撞擊和缺陷非常敏感,但半干摩擦狀態原始信號的峭度值相比潤滑正常時并未發生明顯升高,而第1個IMF的峭度值發生巨大變化,說明它對狀態的變化非常敏感。
(4)對比各指標的變化程度可知,IMF1的峭度和THIKAT以及IMF3的峰值、均方根、K因子對于2種狀態的變化反映較為敏感。
3.4.2 指標與潤滑狀態的變化規律
由上述分析可知,潤滑狀態從正常劣化到干摩擦的過程中,各IMF的指標值對狀態變化的敏感度不一樣,為避免數據選擇的偶然性,選擇3種狀態下各10組信號,計算每種狀態下信號的IMF指標值并取平均值,結果如圖4所示。
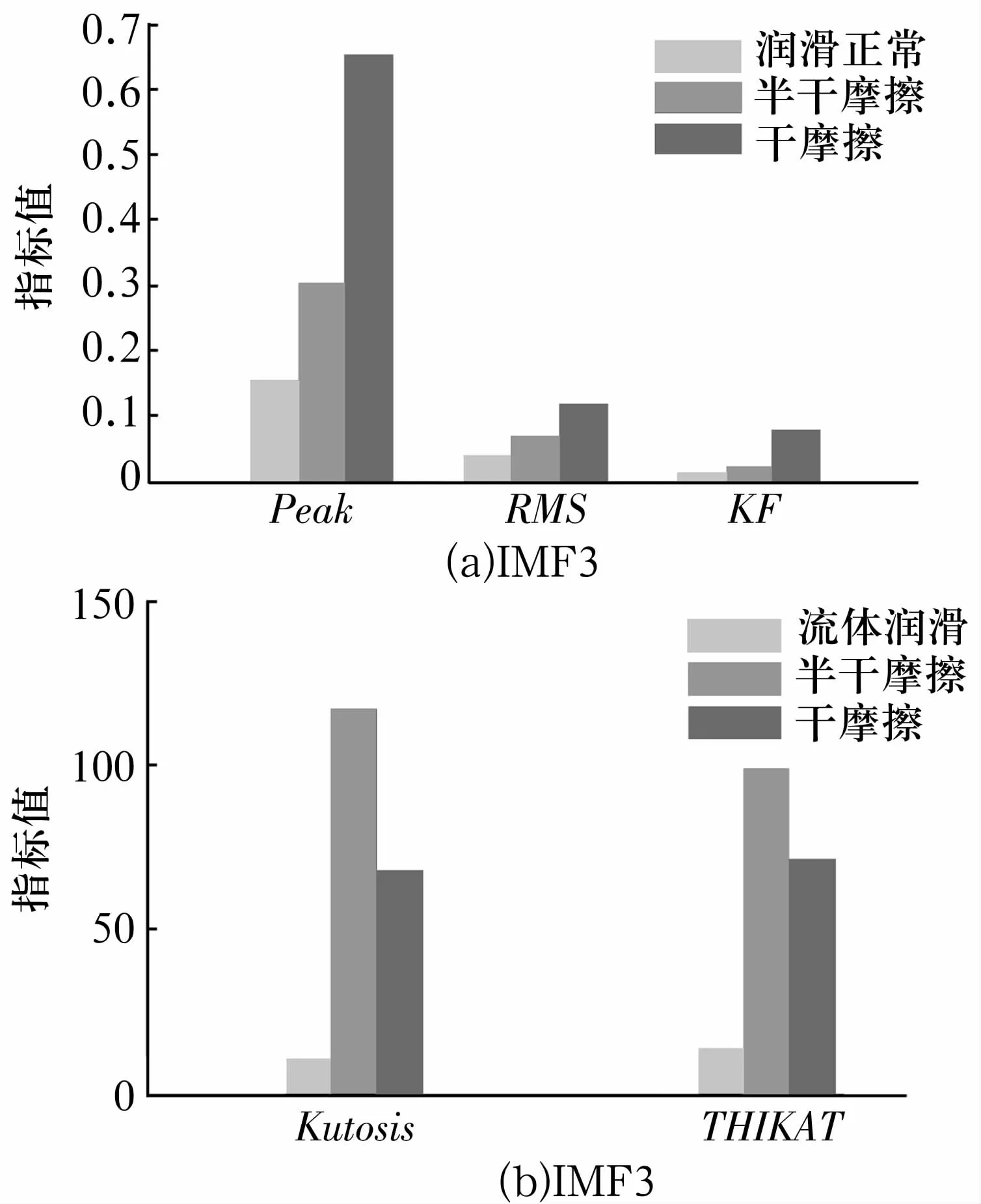
圖4 不同狀態下指標值柱形圖
峰值表示聲發射信號的沖擊效果,均方根表示聲發射信號的平均能量,潤滑正常時,油膜狀態穩定,晶格積聚能量慢且小,與能量相關的峰值和均方根等指標值必然小;當潤滑狀態變差,出現局部碰摩時,摩擦相對劇烈,晶格積聚能量快且大,這些指標值將增大;到了干摩擦狀態,油膜完全破裂,軸瓦與軸頸之間發生嚴重的接觸摩擦,聲發射信號急速增強,這些指標值以更快的增速變大。峭度是表示沖擊特性的指標,其對幅值進行4次方處理,突出高幅值,抑制低幅值,因此對沖擊極為敏感,THIKAT反映沖擊特性和能量變化,由峭度、均方根和峰值共同決定。潤滑正常時,沒有金屬間的碰摩發生,峭度和THIKAT的值都很小;在半干摩擦狀態下,軸瓦與軸頸表面的微凸體發生間歇性的碰摩,這2個指標值將會激增;隨著碰摩的不斷加劇,當整個頻帶范圍內各波峰都是同樣水平的尖峰脈沖時,這2個指標反而下降,但仍遠高于正常值。
由圖4b可知,潤滑狀態從流體潤滑逐漸劣化到干摩擦的過程中,IMF3的峰值、均方根和K因子的變化趨勢以及IMF1的峭度和THIKAT的變化趨勢與理論上的指標變化趨勢相吻合,并且在變化幅度上比原信號更明顯。
4 結束語
為描述滑動軸承不同潤滑狀態的特征指標,使用聲發射信號取代常用的振動信號,并采用EMD方法和統計參數相結合的辦法進行特征指標提取。研究結果表明,EMD在滑動軸承狀態檢測中具有可行性,EMD處理后得到的指標值相比原始信號的指標值變化顯著,尤其是峭度和THIKAT敏感度較高,采用峰值、均方根、K因子、峭度和THIKAT作為特征指標,聯合表征潤滑狀態,能更好地為狀態診斷提供依據。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34