四旋翼飛行器飛行控制專利申請現(xiàn)狀及審查應(yīng)用實例分析
2015-07-27 05:23:51歐鑫磊譚曉波國家知識產(chǎn)權(quán)局專利局專利審查協(xié)作湖北中心武漢430070
山東工業(yè)技術(shù) 2015年13期
歐鑫磊,譚曉波(國家知識產(chǎn)權(quán)局專利局專利審查協(xié)作湖北中心,武漢 430070)
四旋翼飛行器飛行控制專利申請現(xiàn)狀及審查應(yīng)用實例分析
歐鑫磊,譚曉波
(國家知識產(chǎn)權(quán)局專利局專利審查協(xié)作湖北中心,武漢 430070)
摘 要:本文綜合了四旋翼飛行器的概念和特性,從飛行控制方面介紹了四旋翼飛行器的發(fā)展現(xiàn)狀,詳細敘述了四旋翼飛行器的發(fā)展技術(shù)路線,在此基礎(chǔ)上,進一步分析了相關(guān)專利技術(shù)發(fā)展整體情況,并介紹了實際案例審查實踐情況,最后對未來發(fā)展作了展望。
關(guān)鍵詞:四旋翼;飛行控制;專利申請
1 前言
四旋翼飛行器是一種能夠垂直起降(VTOL)、自主懸停、非共軸式多旋翼碟形飛行器,目前世界上存在的四旋翼飛行器基本上都屬于微小型無人飛行器,又稱為四旋翼無人機。
本文在分析四旋翼無人機控制系統(tǒng)的特點和要求的基礎(chǔ)上,論述國內(nèi)外現(xiàn)有飛行控制方法的應(yīng)用現(xiàn)狀,指出四旋翼飛行控制技術(shù)發(fā)展的現(xiàn)狀和趨勢。
2 四旋翼無人機飛行控制技術(shù)研究現(xiàn)狀
四旋翼無人機的四個旋翼呈十字交叉結(jié)構(gòu),四個旋翼由四個電機控制,分別位于十字支架的四個頂端,通過改變每個電機的轉(zhuǎn)速可以實現(xiàn)對飛行器垂直起降、懸停、俯仰(前后)、滾轉(zhuǎn)(左右)、偏航(旋轉(zhuǎn))等姿態(tài)和運動狀態(tài)的控制。
四旋翼無人機是一個非線性、強耦合、欠驅(qū)動、時變的被控對象,國外做出一定成果的高校和科研機構(gòu)有很多,其中進行室外研究的高校及科研機構(gòu)主要有Stanford University, Oakland University, Chiba University, University of Technology of Compiegne,Massachusetts Institute of Technology(MIT), University of Pennsylvania, Ecole Polytechnique Federale de Lausanne(EPFL)等;國外的一些商業(yè)公司也加入了研究行列,如美國的Draganfly公司,德國的Microdron GhmH公司等。
國內(nèi)的一些高校和科研機構(gòu)對四旋翼無人機的研究進取得了相應(yīng)的進展。如國防科技大學、哈爾濱工業(yè)大學、北京航空航天大學,南京航空航天大學以及清華大學等。在國內(nèi),近幾年商用無人機也發(fā)展的相當迅速,如大疆公司的Phantom系列、筋斗云系統(tǒng),以及北方天途航空技術(shù)發(fā)展有限公司生產(chǎn)的M系列多旋翼飛行器[3]。
2.1 數(shù)學建模
關(guān)于四旋翼無人機的數(shù)學建模主要有兩種方法:理論推導法和試驗辨識法。理論推導法是通過對飛行器各部分的物理結(jié)構(gòu)和受力分析,經(jīng)過嚴格的理論計算得到線性或非線性數(shù)學模型;試驗辨識法則是基于試驗數(shù)據(jù),利用系統(tǒng)辨識理論獲得系統(tǒng)參數(shù)模型。目前主要是通過理論分析四旋翼無人機動力學特性,簡化或增加四旋翼的約束條件,建立線性或非線性數(shù)學模型。
2.2 飛行控制方法
四旋翼無人機強耦合、非線性、欠驅(qū)動、干擾敏感的特性,使得飛行控制系統(tǒng)的設(shè)計變得非常困難。此外,控制系統(tǒng)的性能還受到模型準確性和傳感器精度的影響。近年來,國內(nèi)外學者對四旋翼無人機的控制策略進行了大量的研究,表1中列出四旋翼無人機幾種典型的控制方法及其特點。
目前對于四旋翼無人機飛行控制的研究,大部分是針對姿態(tài)穩(wěn)定控制。國內(nèi)外相關(guān)人員都著重進行了姿態(tài)控制器的設(shè)計,但大都加入了許多約束條件,且大部分處于實驗仿真階段,實際工程實現(xiàn)的控制效果較好的四旋翼無人機并不多。
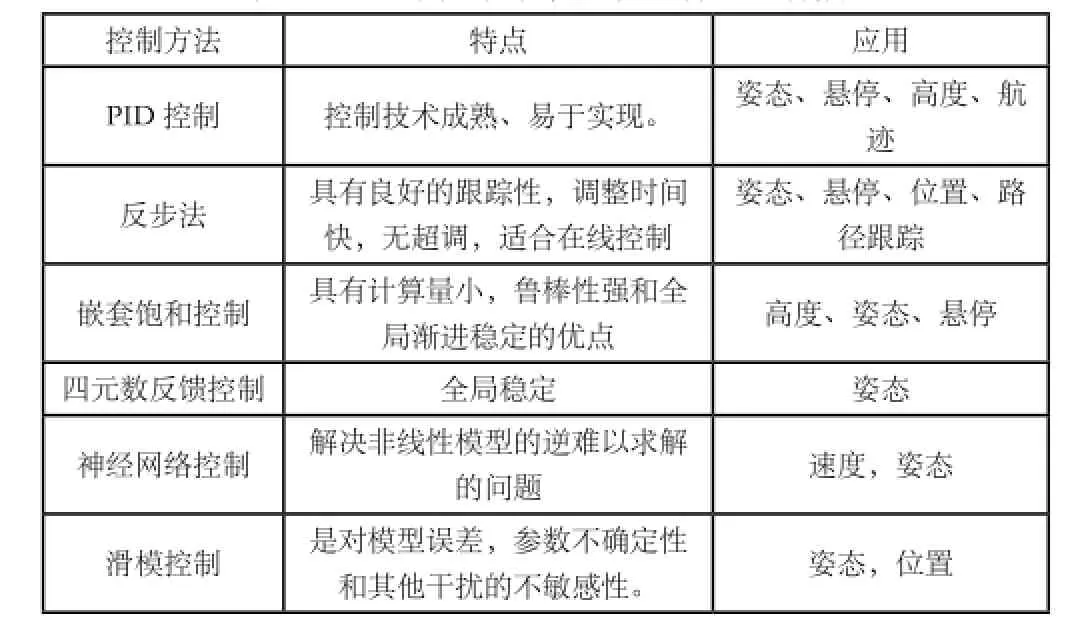
表1 四旋翼無人機典型控制方法及特點
3 四旋翼無人機飛行控制專利技術(shù)發(fā)展整體情況
3.1 專利申請量趨勢分析
圖1為四旋翼無人機飛行控制技術(shù)全球?qū)@暾堏厔輬D。由圖1可見,檢索到的四旋翼無人機的專利最早出現(xiàn)在1996年,申請?zhí)枮椋?6117246.0,該申請公開了一種固定槳葉共軸雙旋翼直升機,為一種遙控直升機,為四旋翼無人機的雛形;從2005年開始,申請量出現(xiàn)持續(xù)快速增長,其原因在于自2005年起,微系統(tǒng)、傳感器以及控制理論等技術(shù)的發(fā)展,以往的技術(shù)瓶頸得以突破,四旋翼無人機又引起人們極大的興趣,自2008年后,各大高校和科研院所也將研發(fā)精力紛紛投入到其中,導致申請量增長極為迅速,至今為止仍在持續(xù)增長。
3.2 專利申請產(chǎn)出國和申請人分布
通過對所檢索到的專利文獻產(chǎn)出國進行統(tǒng)計分析,如圖2所示,排名靠前的國家依次為中國,美國,德國,法國,并且排名第一的中國的申請量遠遠高于其他國家,顯示出極高的研發(fā)活躍度。
進一步地,對在華申請人進行統(tǒng)計分析發(fā)現(xiàn),如圖3所示,約85%的申請來自高校和研究所,而企業(yè)的申請量僅占約10%。中國企業(yè)申請人中具有代表性的企業(yè)是深圳大疆公司,該公司成立于2006年,是全球領(lǐng)先的無人飛行器控制系統(tǒng)及無人機解決方案的研發(fā)和生產(chǎn)商,到目前為止共申請專利80余件,其中發(fā)明專利占30余件。高校及研究所的申請人中,南京航空航天大學位居第一,相關(guān)申請量為85件,天津大學和哈爾濱工業(yè)大學的相關(guān)申請量分別為25件和18件,其他高校及研究所的申請量則相對較少。
3.3 主要技術(shù)分支
四旋翼無人機飛行控制技術(shù)主要有以下幾個技術(shù)發(fā)展路線:1)通過改進四旋翼無人機自身的結(jié)構(gòu)來改進飛行性能;2)通過改進飛行控制算法來改進飛行性能;3)通過研究不同的飛行控制方式來改進四旋翼無人機飛行性能。
圖5示出了四旋翼無人機自身結(jié)構(gòu)的改進、飛行控制算法的改進、飛行控制方式的改進以及其他技術(shù)類專利文獻的占比情況,可以看出,飛行控制算法的改進和飛行控制方式的改進是兩大主要研究方向,其中飛行控制算法技術(shù)發(fā)展方向上的專利文獻的關(guān)注點在于將不同的控制算法或是將不同的控制算法進行融合后應(yīng)用到四旋翼無人機控制系統(tǒng)中,使四旋翼無人機的控制性能更加優(yōu)越。
飛行控制方式的改進主要是解決四旋翼無人機飛行控制問題,該技術(shù)發(fā)展方向上的專利文獻的關(guān)注點在于如何解決四旋翼無人機自主飛行的問題。該技術(shù)發(fā)展路線如圖6所示,基于視覺的位姿控制方法,主要是根據(jù)攝像頭采集到的圖像序列信息,利用計算機視覺技術(shù)進行分析。
由上述內(nèi)容可知,四旋翼無人機從最初通過遙控裝置控制其飛行姿態(tài)逐漸發(fā)展成通過視覺、手勢以及體感等方式來進行控制,未來的發(fā)展趨勢將會實現(xiàn)完全自主飛行的四旋翼無人機,技術(shù)人員只需要將飛行計劃和飛行任務(wù)輸入四旋翼無人機,無人機就可以根據(jù)飛行任務(wù)和計劃自主進行飛行,同時能應(yīng)付在飛行過程中出現(xiàn)的各種突發(fā)情況,最終實現(xiàn)四旋翼無人機的完全自主化,智能化。
4 審查實踐應(yīng)用示例
對四旋翼無人機專利技術(shù)的了解,可以幫助相關(guān)領(lǐng)域的人員快速準確理解技術(shù),提高效率。下面以三件不同類型的申請人的實審案件為例來說明。
【案例1】
申請?zhí)枺?01210589626.1
發(fā)明名稱:一種基于操控員頭部動作操控移動平臺的系統(tǒng)和方法
申請人:安科智慧城市技術(shù)(中國)有限公司
本申請的目的在于提供一種利用頭部動作控制四旋翼飛行器的系統(tǒng)和方法,以提高四旋翼飛行器的飛行控制性能。
首先判斷本申請屬于無人機控制領(lǐng)域的申請,技術(shù)效果是解放操控人員的雙手,提高操控員手部的活動能力。通過對四旋翼飛行器專利技術(shù)發(fā)展路線的梳理,可以很快定位有關(guān)基于視頻操控四旋翼飛行器的關(guān)注最早出現(xiàn)在2007年,并且集中發(fā)展于2008-2014年這幾年間,在此范圍內(nèi)進一步尋找,就能找到2008年的一篇對比文件(WO2008045144 A2)。該對比文件的技術(shù)方案也是通過視頻捕捉頭部動作控制四旋翼飛行器以解放操控人員的雙手。通過對該對比文件的技術(shù)方案的進一步閱讀和理解,審查員引用該對比文件評述本申請權(quán)利要求1的新穎性。
【案例2】
申請?zhí)枺?01210459227.3
發(fā)明名稱:一種無人機的控制方法
申請人:中國兵器工業(yè)計算機應(yīng)用技術(shù)研究所
本申請的目的在于針對傳統(tǒng)的無人機飛行控制方法的缺陷,提供一種控制精度高、抗干擾能力強的無人機控制方法。
本申請屬于無人機控制領(lǐng)域的申請,技術(shù)效果是無人機的控制算法效果更好,且無人機出現(xiàn)故障時可自動返航。通過對四旋翼飛行器專利技術(shù)發(fā)展路線的梳理,可以確定本申請的技術(shù)方案對現(xiàn)有技術(shù)作出改進的技術(shù)特征為無人機出現(xiàn)故障時可自動返航。針對該技術(shù)特征在專利庫和非專利庫進行相應(yīng)的檢索,得到對比文件1(“小型無人駕駛飛機飛行控制系統(tǒng)原理及設(shè)計”,薛安國,中國優(yōu)秀碩士學位論文全文數(shù)據(jù)庫,工程科技Ⅱ輯,C031-21)和對比文件2 (CN101807051A),利用對比文件1結(jié)合對比文件2可以評述本申請權(quán)利要求1的創(chuàng)造性。
【案例3】
申請?zhí)枺?01210471001.5
發(fā)明名稱:多螺旋槳飛行器控制裝置
申請人:南京理工大學
本申請的目的在于提供一種采用協(xié)處理器協(xié)調(diào)工作,加強系統(tǒng)可靠性的多螺旋槳飛行器控制裝置。
本申請屬于無人機控制領(lǐng)域的申請,通過對四旋翼飛行器專利技術(shù)發(fā)展路線的梳理,可以確定本申請的技術(shù)方案對現(xiàn)有技術(shù)作出改進的技術(shù)特征為該控制裝置包括一個協(xié)處理器。針對該技術(shù)特征在專利庫和非專利庫進行相應(yīng)的檢索,得到對比文件1(“四旋翼飛行器控制系統(tǒng)構(gòu)建及控制方法的研究”,程敏,中國優(yōu)秀碩士學位論文全文數(shù)據(jù)庫,工程科技Ⅱ輯,C031-58)和對比文件2 (CN2681997Y),利用對比文件1結(jié)合對比文件2可以評述本申請權(quán)利要求1的創(chuàng)造性。
5 總結(jié)與啟示
四旋翼飛行器飛行控制技術(shù)是一項涉及多門交叉學科的技術(shù)。經(jīng)過近十幾年的快速發(fā)展,各大高校和企業(yè)都產(chǎn)生了極大的研究熱情,并取得了一定的研究成果。四旋翼飛行器飛行控制技術(shù)目前處于技術(shù)發(fā)展的上升期。由于該技術(shù)的多樣性和復雜性,在技術(shù)發(fā)展過程中會融入很多其他學科的技術(shù)知識,這就要求審查員在審查過程中不斷加強自身的學習,努力達到本領(lǐng)域技術(shù)人員的高度,準確把握發(fā)明與現(xiàn)有技術(shù)的界限。
參考文獻:
[1]中華人民共和國國家知識產(chǎn)權(quán)局.專利審查指南2010[M].北京;知識產(chǎn)權(quán)出版社,172-175.
[2]胡宇群.微型飛行器中的若干動力學問題研究[D].南京:南京航空航天大學,2002.
[3]李占科,宋筆鋒,宋海龍.微型飛行器的研究現(xiàn)狀及其關(guān)鍵技術(shù)[J].飛行力學,2003,21(04):1-4.
作者簡介:歐鑫磊(1987-),男,碩士,研究方向:自動控制-專利審查。
