
數字PID液位控制調節器的設計
2015-07-27 08:18:06席玉青洛陽職業技術學院河南洛陽471000
山東工業技術 2015年21期
席玉青(洛陽職業技術學院,河南 洛陽 471000)
數字PID液位控制調節器的設計
席玉青
(洛陽職業技術學院,河南 洛陽 471000)
隨著科學技術的飛速發展和人們生活水平的提高,現代儀表已日趨數字化、網絡化和智能化。本設計是針對液位的一種數字PID控制器,可以在線實現PID參數的調整,使控制系統的響應速度加快,超調量減少,過渡過程時間大大縮短,振蕩次數少。該控制器可以在液晶屏屏同時顯示設定值、反饋值和PID各參數的值。
數字PID;液位控制調節器;設計
PID控制是基于反饋理論的調節方式,它通過測量、比較獲取偏差信號,并將偏差的比例(Proportion)、積分(Integral)、微分(Differential)通過線性組合構成控制量對被控對象進行調節。
1 系統硬件設計
(1)本系統硬件整體框圖。本系統選擇的是12位的max188 和max538作為系統的數據轉換芯片。系統的主要處理核心是Atmel公司生產的高性能AVR單片機Mega16L。系統的結構框圖如圖1所示。

圖1 系統的結構框圖
(2)Atmega16單片機。單片機是整個設計系統的核心部件,它直接影響整機的硬件和軟件設計。它對系統的功能以及研制周期起決定性作用。本設計選用了Atmega16單片機作為本設計系統的核心處理器。Atmega16單片機及外圍連接電路如圖2所示。

圖2 Atmega16單片機及外圍連接電路
(3)模數轉換電路。本設計使用的是前兩路CΗ0和CΗ1,通道的選擇是通過控制字,由軟件控制的。其主要的引腳介紹及連接如圖3所示。為更方便控制轉換芯片的轉換速度,本設計采用自己定義的外部時鐘,如程序中使用PB0口作為時鐘端口,根據程序的需要,控制時鐘頻率,如圖3所示。
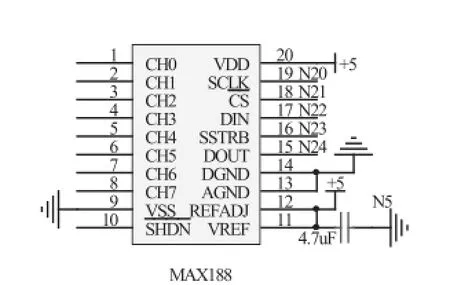
圖3 max188主要的引腳介紹及連接
(4)數模轉換電路。在本設計中,使用兩片max538。借于max538的體積小,使用起來方便靈活,為設計硬件電路帶來了很大的方便。其管腳圖及主要的引腳功能如圖4所示。
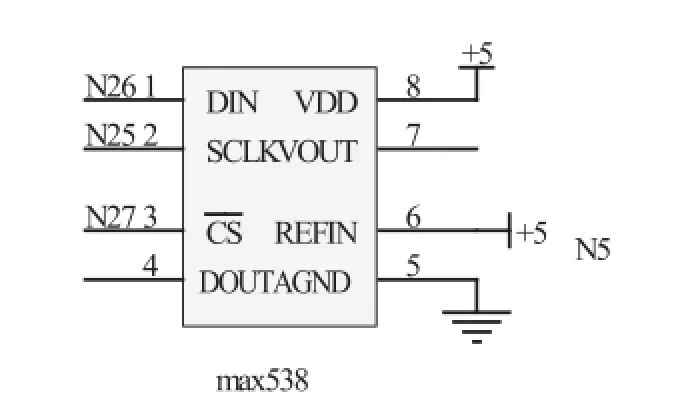
圖4 max538的原理圖
2 軟件設計
(1)軟件結構設計。高精度數字PID調節器控制系統其控制程序從功能上來說,大致包括系統初始化程序、PID算法主程序、模數轉換子程序、數模轉換子程序、液晶顯示子程序、鍵盤子程序、掉電保存子程序以及其他一些輔助程序。
(2)主程序。主程序系統各功能模塊子程序主要包括:A/D轉換子程序、液位顯示子程序、液位處理子程序以及。各主要模塊的功能如下:1)A/D轉換子程序:讀取max538送入單片機的模擬量電壓信號,并換算相對應的也為信號;2)液位處理子程序:將換算后的液位信號經單片機換算后送入顯示模塊顯示;3)液位顯示子程序:向LCD送數據顯示,控制系統的顯示部分;4)液位設定子程序:實現按鍵輸入預設液位值。
(3)程序編譯及仿真。本設計使用ICC編譯器進行目標代碼生成,外部數據轉換芯片可以根據單片機端口定義的時鐘,很有規律的進行數據段讀寫操作。系統主程序還使用了AVR studio進行仿真,確保程序的完整、可靠的運行。
[1]潘新民.單片微型機實用系統設計[M].北京:人民郵電出版社,2010.
[2]何立民.單片機應用技術選編[M].北京:北京航空航天大學出版社,2011.
[3]張寶芬.自動檢測技術及儀表控制系統[M].北京:化學工業出版計,2011.
[4]于海生等.微型計算機控制技術[M].北京:清華大學出版社,2012(08).
10.16640/j.cnki.37-1222/t.2015.21.115
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2019年12期)2019-05-21 02:55:44
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
汽車維護與修理(2015年2期)2015-02-28 12:15:41
