基于Robcad的點焊機器人運動仿真
2015-07-27 07:38:41臧銘書孫秀玲煙臺艾迪液壓科技有限公司山東煙臺65500煙臺大學機電汽車工程學院山東煙臺64005
山東工業技術 2015年19期
關鍵詞:仿真
臧銘書,孫秀玲(.煙臺艾迪液壓科技有限公司,山東 煙臺 65500;.煙臺大學機電汽車工程學院,山東 煙臺 64005)
基于Robcad的點焊機器人運動仿真
臧銘書1,孫秀玲2
(1.煙臺艾迪液壓科技有限公司,山東煙臺265500;2.煙臺大學機電汽車工程學院,山東煙臺264005)
摘要:本文介紹了利用Robcad軟件對汽車白車身點焊機器人進行運動仿真的工作流程和技術要點,在汽車縱梁分拼工位中進行了實際的仿真設計,有效地提高了工作效率和安全性,表明Robcad軟件在汽車車身焊接生產中具有重要的應用價值。
關鍵詞:Robcad;汽車縱梁分拼;點焊機器人;仿真
0 引言
隨著經濟水平的不斷提高,汽車已經成為非常普遍的交通工具,而且需求量不斷攀升,為了提高生產效率,降低生產成本,現在大部分汽車生產廠采用流水線的生產形式。在汽車的制造中,焊接是應用最多的連接方式,其中電阻焊占焊接工作量的70%以上,主要形式為點焊。據統計,一輛載貨車身約2000多個焊點,一輛轎車車身約4000~5000個焊點[1-3]。國外汽車焊接生產線已實現了以柔性、多車型混裝焊接為代表的高度自動化、機器人大量應用的生產線設計技術,國內汽車制造企業在引進國外生產線的基礎上已使制造水平大有長進,但與國外相比仍有較大差距[4]。
應用于汽車焊接的工業機器人一般為6自由度機器人,機器人運動過程復雜、造價高,若操作不當可能會造成生命財產損失,而且現場試教調試工作量大、難度高,因此,在進行實際的焊接工作之前,仿真機器人的焊接作業過程,并規劃焊接路徑,對于避免現場事故、降低現場調試的難度有重要意義。
1 Robcad仿真流程
Robcad是原Tecnomatix公司(現屬SIE-MENS公司)于20世紀80年代推出的大型機器人仿真系統,具有仿真精確、建模快速及易于實現離線編程的特點[5]。
運用Robcad軟件對汽車縱梁分拼工位進行焊接仿真的過程也就是模擬實際焊接作業的過程,因此,仿真時首先需要布置焊接作業環境,然后建立仿真模型,最后進行焊接仿真及路徑優化。其主要仿真流程為:數模轉換→定義焊槍→建立仿真模型→路徑規劃仿真→干涉檢查→離線編程。
2 汽車縱梁分拼工位仿真
2.1Robcad的數據類型及數模轉換
Robcad軟件有兩種格式的數據,分別為.ce和.co,.ce數據存放機器人或其他模型的裝配信息,.co數據存放機器人和所需模型的三維信息。
在Robcad中的進行數據轉換是指將不同格式的數據,通過接口轉換成Robcad能使用的數據類型[6]。Robcad有多種三維軟件轉換接口,可將三維數模導入并轉換到Robcad環境,仿真實際環境的三維環境,保證機器人的仿真設計與實際應用相統一[6]。
仿真前需準備好焊接夾具、縱梁等模型文件,運用Data菜單中的CADImport命令對其進行數模轉換。
2.2定義焊槍
2.2.1建立焊槍數模運動關系
為模擬焊槍在焊接過程中的真實運動狀態,需要定義焊槍的相關參數。
在Modeling模塊獨立打開焊槍的.co文件,通過Link定義焊槍的靜臂和動臂,通過Axis定義焊槍動臂的旋轉軸,通過Joint創建關節運動方式,通過State菜單中的Edit分別定義OPEN、SEMIOPEN、CLOSE和HOME四種運動狀態。
2.2.2建立焊槍工具坐標系(tcp)和裝配位置坐標系
對焊槍進行焊接作業仿真時,需定義焊槍裝配坐標系,將焊槍關聯到機器人上,使焊槍跟隨機器人運動而運動,并定義焊槍工具坐標系,即定義焊槍的作業點。
通過GeneralTools菜單中的CreateFrame創建tcp坐標系和焊槍的裝配位置坐標系,圖1為完成坐標系定義的焊槍。
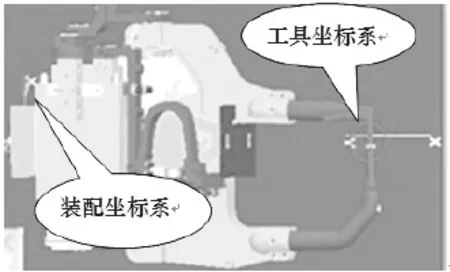
圖1 完成定義的焊槍坐標系
2.3建立仿真模型
2.3.1加載機器人、焊槍、夾具和縱梁
在滿足縱梁分拼作業要求及空間要求的前提下,選擇KUKA型機器人,機器人和焊槍模型是廠家直接提供的,夾具是根據作業要求設計的,縱梁模型及焊點信息由汽車制造廠提供。通過GetComponent命令分別加載機器人、焊槍、夾具及縱梁模型,對LocateAt項不作處理或通過Position選項指定部件位置,保證相互之間準確的位置關系。
2.3.2導入焊點
運用wold_locs命令導入焊點。將焊點信息保存為“POINT+空格+焊點號(小寫字母開頭)+Tab+X值+Tab+Y值+Tab+Z值”格式。
例如:“POINTh0141490-13-21”
將縱梁分拼焊點按照上述格式整理保存為“.pt”格式的文件,如圖2所示。
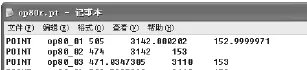
圖2 焊點文件
2.3.3關聯焊槍
通過Motion命令將焊槍上的裝配坐標系關聯到機器人的坐標系上,并按規則設置工具坐標系的坐標軸方向,規則為Z坐標(長虛線)表示焊槍進入方向,X坐標(長實線)表示焊鉗動臂方向。
2.4路徑規劃仿真
2.4.1設置焊鉗動作方向
為使焊鉗作業時動、靜臂的動作方向與實際一致,需設置焊鉗動作方向。
通過Spot_setup命令,將焊鉗進入方向Approach修改為Z,再將焊鉗動臂方向Perpendicular修改為X,如圖3所示。
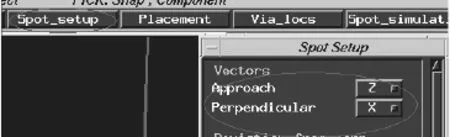
圖3 設置焊槍動作方向
2.4.2創建焊接軌跡
通過PathEditor命令顯示所有焊點的設計樹,將焊點編制成組并命名路徑。
通過Motion命令仿真機器人到達焊點坐標的姿態并檢查焊點是否可達,為保證機器人到達焊點時具有良好的姿態,需適當調整焊點方向,用PlacementEditor命令調整單個焊點方向,用Flip Location或者AlignOrientation命令批量調整焊點方向,使焊點X軸與工具坐標系X軸方向保持一致。
機器人走完焊接軌跡后手動編制機器人返回原點或至另一焊點,運用Mark_loc命令記錄這一過渡軌跡,編制到焊接路徑,完善路徑。
2.5干涉檢查
在實際生產中,車身和夾具等結構十分復雜,機器人和焊槍與車身和夾具的干涉一般不易被發現,Robcad具有自動干涉校驗功能,運用CollisionSetup菜單中的DefinePair命令定義干涉檢查的干涉項,如在Firstlist欄中添加車身和夾具,在Secondlist欄中添加機器人和焊槍,若發生干涉系統會發出報警提示(發出聲音或紅色報警顯示),通過調整機器人的姿態和焊點的方向來避免干涉,以此來避免實際生產中的損失。
2.6離線編程
機器人的編程有在線示教編程和離線編程(OLP)兩種,在線示教編程為與控制模塊連接時的編程,離線編程為與機器人或者控制模塊斷開時的編程,與在線示教編程相比,離線編程的優點如下:
(1)減少機器人停機時間,提高生產效率;
(2)遠離危險工作環境;
(3)實現CAD/CAM/ROBOTICS一體化;
(4)可提高編程精度[7、8]。
縱梁分拼路徑復雜,要求精度較高,進行離線編程顯得尤為重要。在進行OLP調試前需要對機器人校準。通過OLP模塊可以設置與已選型機器人相配套的控制器,在生成的OLP程序中包括焊槍參數、焊點焊接順序和路徑信息、運行速度和加速度、軌跡類型信息、基坐標、工具中心坐標等。
通過離線編程很大程度地減少了現場工作人員的編程量,縮短了項目周期,節約成本,提高現場工作的安全性[9]。
3 結論
在Robcad軟件的應用中,路徑規劃仿真和干涉檢查是關鍵技術,是保證機器人實際作業高效性和可靠性的主要因素,通過Robcad在縱梁分拼工位中的實際應用,表明可以方便地進行焊接軌跡的創建與優化,易于發現和解決焊槍干涉等問題,能有效避免實際作業中事故的發生,通過離線編程,減少現場示教、調試困難,因此Robcad軟件在汽車焊裝生產中具有重要的應用和推廣價值。
參考文獻:
[1]陳猛.快速可重構汽車焊裝制造系統及其關鍵支持技術研究[D].重慶:重慶大學機械工程學院,2002.
[2]張延松.伺服焊槍在汽車車身制造中的應用[C]//中國汽車工程學會2003學術年會,2003:429-433.
[3]鄧仕珍,范淼海.汽車車身制造工藝學[M].北京:北京理工大學出版社,2002:109
[4]董萬.轎車白車身焊接生產線設計及虛擬設計技術應用研究[D].電子科技大學,2008.
[5]張繼禹,蔡鶴皋,王樹國等.一個大型機器人仿真系統——ROBCAD[J].哈爾濱工業大學學報(自然科學版),1993,25(03):109-113.
[6]于登云,孫京,馬興瑞.空間機械臂技術及發展建議[J].航天器工程[J],2007,16(04):1-9
[7]徐小劍,楊國平.Robcad在車身后輪罩滾邊中的應用[J].上海工程技術大學學報,2013(03):216-220.
[8]鄧偉俊.基于Robcad軟件的機器人基于軟件的機器人點焊離線編程系統研究[J].金屬加工(熱加工),2014(10):62-63
[9]寧宇.基于數字化工廠的轎車地板焊裝線的混流設計與規劃[D].吉林:吉林大學,2011.
作者簡介:臧明書(1969-),男,山東萊陽人,本科,工程師,研究方向:機械設計。
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
