51單片機中for循環延時時間的分析與仿真驗證
2015-07-27 07:38:45薛金水廣東工程職業技術學院廣州510520
山東工業技術 2015年19期
關鍵詞:單片機
薛金水(廣東工程職業技術學院,廣州 510520)
51單片機中for循環延時時間的分析與仿真驗證
薛金水
(廣東工程職業技術學院,廣州510520)
摘要:在單片機控制中,延時控制是最常用的程序之一。本文對51系列單片機中各種for循環程序對應的匯編代碼進行分析,探究延時時間長短的各種決定因素,提出了應用for循環實現延時時間的一般估算方法和注意要素。并通過Proteus軟件仿真,對延時控制程序的時間進行驗證。
關鍵詞:單片機;for循環;延時控制;匯編代碼;Proteus仿真
1 引言
在單片機控制中,延時控制是最常用的程序之一。通過延時,一方面使系統硬件各部分按照步驟設定,一步一步執行下去;另一方面使系統的硬件和軟件能夠協調運行,完成設定的傳輸和控制功能。延時控制既可以用硬件、也可以用軟件來實現。軟件控制可以用匯編語言或者C語言程序來實現。雖然匯編語言有指令緊湊、控制時間精確、占用內存少等特點,但是它相對難于掌握。由于C語言具有語言功能齊全、使用靈活方便、開發效率高,相對容易掌握等特點,被廣泛應用于在單片機系統開發應用中。
在C語言延時程序設計中,常用三種循環語句(while語句、do while語句和for語句)實現延時功能。其中以for循環延時最為常見。本文從應用需要角度出發,依據單片機C語言for循環的各種不同形式,通過具體實例,對照編譯生成的匯編代碼,分析、歸納總結出C語言for循環延時程序的延時時間估算方法及,通過Proteus軟件仿真進行驗證,并提出使用建議。
2 各種for循環語句程序延時結果分析
用C語言編寫的單片機程序,首先要轉換為匯編語言,最后編譯為機器代碼后才能真正運行。因此,對于用C語言編寫的各種延時程序,只有通過從其匯編轉換代碼上計算其實現延時時間,才是比較準確時間估算的方法。
2.1決定for循環延時時間長短的因素
從各種for循環語句程序延時情況進行分析和驗證,發現:與延時結果有關的因素有如下三個:循環變量類型(char或者int類型)、循環變量變化方式(遞增或者遞減)和循環次數(是否超過256)。下表是考慮上述三種因素的不同for循環延時程序的匯編代碼與實際延時時間分析和比較。
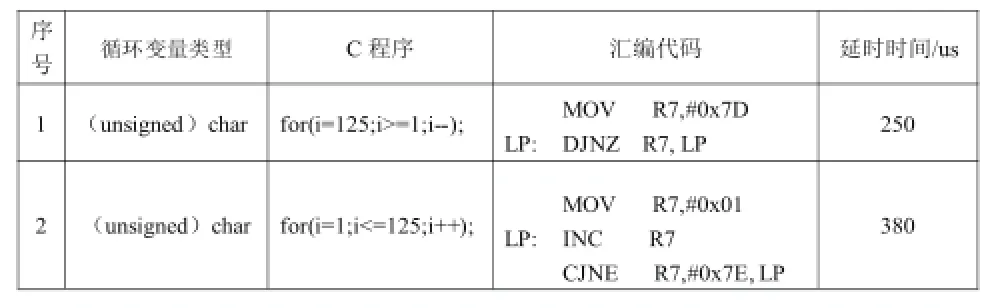
表1 循環變量為char類型的for循環延時程序
從表1可以看出,以char類型為循環變量、循環變量遞減變化時,是使用寄存器R7,以DJNZ語句為循環體,延時時間為1+2x125=251us;以char類型為循環變量、循環變量遞增變化時,同樣使用寄存器R7,以加1指令INC和CJNZ語句為循環體,延時時間為1+(2+1)x126=379us。采用char類型為循環變量時,循環變量遞增與遞減變化時,其延時時間差別比較大。
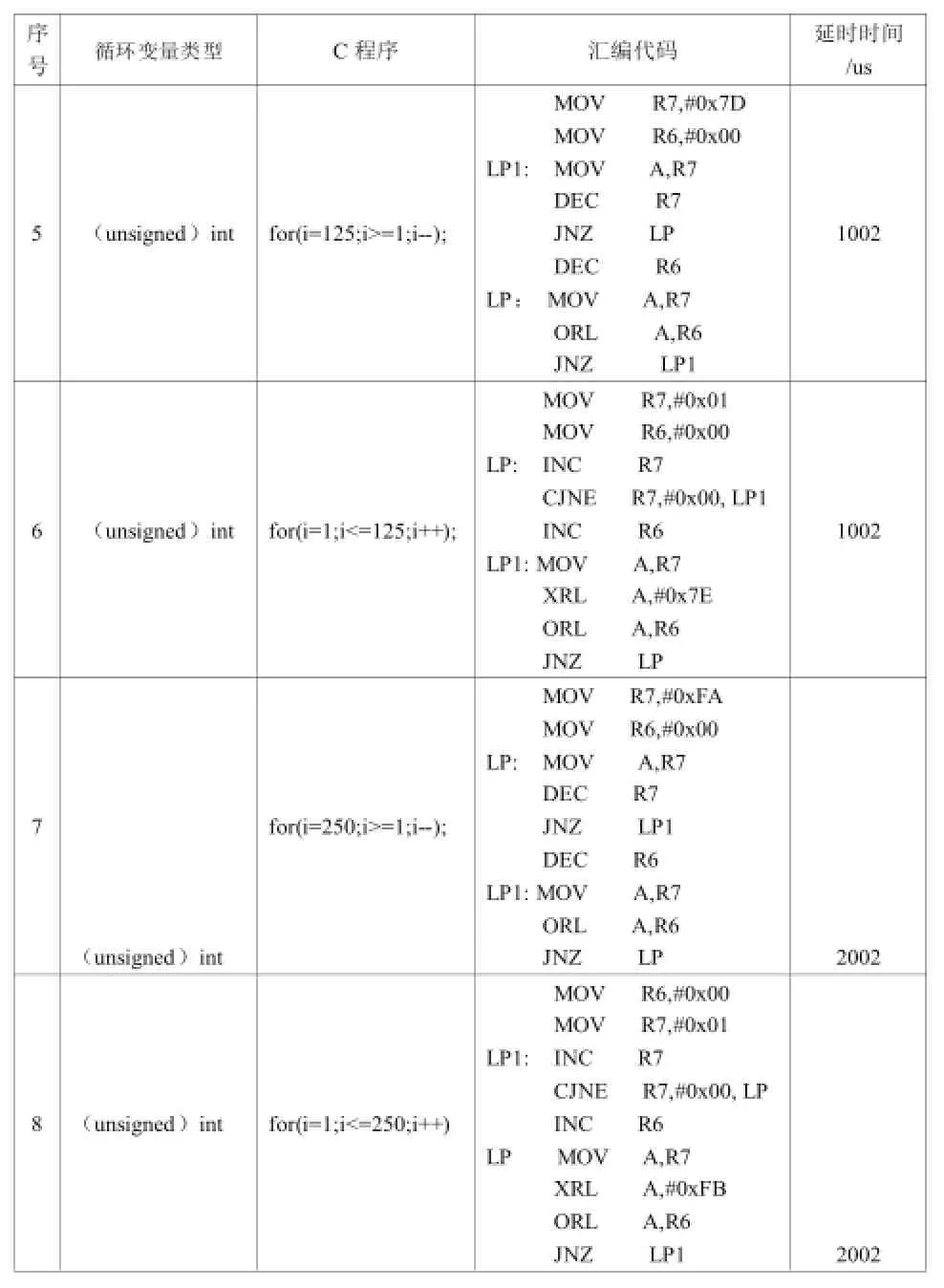
表2 循環變量為int類型的for循環延時程序
從表2可以看出,以int類型為循環變量時,只要循環次數不超過256次,則循環變量無論是遞減還是遞增變化,匯編語言都是使用寄存器R6和R7,以INC、CJNE或DJNZ語句為循環體,在循環次數相同時延時時間近似相等,循環次數增加時延時時間按照比例增加(見函數5、6、7、8);當循環次數超過256次,延時時間不再成比例增加,例如:采用(unsigned)int;for(i=500;i>=1;i--);的延時時間約為4000us;采用(unsigned)int;for(i=1;i<=500;i++);的延時時間約為3000us。讀者可自行驗證。
2.2for循環延時程序的應用
從以上分析可以看出:采用char類型為循環變量類型時,循環變量按照遞加或者遞減變化時,延時時間會差別較大;采用int類型為循環變量類型時,在循環次數不超過256次時,按照遞加或者遞減變化時,延時時間差別很小;而當循環次數超過256次時,其延時時間不能夠實現等比例增加。
所以,從應用角度出發,采用定義i為整型時,以for(i=125;
i>=1;i--);或者for(i=1;i<=125;i++);語句來作為1ms基本延時函數,不用考慮循環變量是遞加還是遞減,比較簡單易掌握。需要較長的延時時間采用二重循環的方式。采用二重循環的方式,最長可以延長255ms,能夠滿足一般的延時需求。如果需要更長時間延時,則可以用三重甚至多重循環方式,但是循環次數一般不能超過256次。
例如:要實現延時10ms,則可以用如下循環
3 C語言程序軟件延時功能的Proteus仿真軟件
C語言延時功能實現過程中,為了驗證其延時的正確性,一方面可以利用示波器來測定延時程序執行時間,即設計一個基本單片機硬件電路,將包含實現延時函數的程序下載到單片機硬件電路,在程序中運行該延時函數,通過測量示波器相關輸出引腳上的高、低電平時間,即可確定延時函數執行時間;也可以采用反匯編方法,即利用Proteus軟件將用C51編寫的延時函數轉換為匯編語言程序,通過計算匯編語言程序的運行時間得到該延時函數的運行時間;或者利用KeilC51編譯器中的斷點調試功能來模擬執行延時代碼所需的時間,即在延時函數前、后設置斷點,通過比較兩個斷點的時間變化來確定延時程序實際執行時間。
這里介紹一種與單片機教學緊密結合,又比較容易實現的方法,即是利用Proteus軟件仿真功能來搭建一個硬件電路,然后將目標程序經編譯后生成HEX文件,寫入C51單片機中,利用Proteus中的虛擬示波器觀察設置輸出引腳(如P1.0)波形的變化周期來判斷是否實現預定延時功能。
例如:執行上述延時10ms程序來控制輸出引腳(如P1.0)變化,將其生成的.HEX文件寫入單片機仿真電路中,利用Proteus中的虛擬示波器生成波形來判斷是否實現預定延時功能。如上述程序的波形圖如圖1。
從波形圖和相關旋鈕可以看出,該波形的幅度為5格*1V/格=5V,高、電平為2格*5ms/格=10ms,實現其延時功能。

圖1
4 結束語
本文通過分析比較,提出一種比較可靠的1ms基本延時函數實現方法,通過對該延時函數的循環,便可以實現較長時間延時。通過軟件仿真,對延時控制程序的時間精確度進行驗證和分析,并且可以根據實際延時輸出情況進行調整。本文介紹單片機延時控制的實現方法比較容易掌握實現,對延時精確度要求不是特別高的場合,具有一定的參考和應用價值。
參考文獻:
[1]陳宏希.51單片機中for循環延時時間的估算[J].蘭州石化職業技術學院學報,2013,13(04):34-36.
[2]戴娟.單片機技術與應用[M].高等教育出版社,2012(10).
[3]吳挺運,林成何.KeilC51精確延時程序設計[J].電子科技,2012 (12):103-106.
[4]林立,張俊亮.單片機原理及應用——基于Proteus和Keil C(第3版)[M].電子工業出版社,2014(08).
作者簡介:薛金水(1974-),男,廣東興寧人,本科,研究方向:電子信息類專業教學和研究。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
