水下控制模塊的應用與設計分析
2015-08-04 09:08:24汪學軍張建權葉民杰
石油礦場機械 2015年7期
關鍵詞:設計
李 波,汪學軍,張建權,葉民杰,呂 強
(1.中原油田物資供應處,河南濮陽457003;2.上海神開石油設備有限公司,上海201114)①
水下控制模塊的應用與設計分析
李波1,汪學軍2,張建權2,葉民杰2,呂強2
(1.中原油田物資供應處,河南濮陽457003;2.上海神開石油設備有限公司,上海201114)①
水下生產控制系統是一個龐大復雜的系統,其中水下部分的核心單元是水下控制模塊,其可靠性是最關鍵的一個技術指標。通過對當前有代表性幾家公司產品的介紹,闡述了其基本組成及主要功能,對水下控制模塊的原理進行分析,并對設計中的技術難點進行分析,結合目前國內水下控制系統研發中重點關注的測試方法,為產品國產化提供充分的數據,降低用戶的使用風險。
水下控制模塊;水下生產控制系統;應用;設計
目前,海洋油氣田開采所需配套核心設備包括水上與水下部分均被5家國外公司(4家美國公司Cameron、FMC、GE Oil&Gas、Dril-Quip和1家挪威公司Aker Solutions)所壟斷。而我國也僅在南海引進了1套水下設備,其他的設備均使用于墨西哥灣、北海海域、巴西海域和西非等海域。國內在水下設備方面的發展速度也在加快,隨著近3 a來許多相關立項均得到國家及地方的政策支持,意味著該產業的發展已進入了快車道。水下設備中的各種零配件的研發也得到國內眾多相關廠家的關注,而水下控制模塊的研發則是水下控制系統研發中最核心的單元。
1 水下控制模塊的應用分析
水下生產系統作用是實時監測水下井口和生產系統的各種工作狀況,調整生產壓力與流量等參數,并對異常情況進行監測及有限的應急處理。由于生產系統設施置于水下數百米乃至數千米深處,距離監控平臺也很遠,對生產的監控和管理完全依賴于水下控制系統,因而與常規的控制系統相比,需要選用可靠性更高、免維護或更換方便的控制產品,這也決定了水下部分的設施要有嚴格的質量與壽命要求,而水下部分的核心設施單元便是水下控制模塊(SCM )。
1.1 水下控制模塊的組成及功能
水下控制模塊(SCM)是水下控制系統的關鍵部件,它通過接收到上端主控制模塊MCS或地面控制信號來控制SCM內部液壓閥件的開啟與通斷,來實現對安裝于采油樹中各種功能閥的開啟與關閉,同時將分布于采油樹及流程中的各種傳感信號集中處理后傳輸到上端的主控模塊MCS中。各種信號包括采油樹中的井口壓力與溫度、閥位開關信號、化學試劑的流量等。為了保證系統的可靠性,除了采用性能可靠的元件外,冗余設計也是水下控制模塊設計的一個特點。根據項目需要,水下控制模塊可能還將承擔其他區域信號的監測與傳輸功能。
1.2 典型水下控制模塊
1.2.1 FMC公司的水下控制模塊
圖1為FMC公司的一款使用相當成熟的水下控制模塊,它的外形通常采用圓柱形,結構相對比較簡單,內部的零件也分布合理。FMC公司提供的水下模塊系統眾多,工作水深從400~3 000 m均有成熟的產品,內部控制壓力最高可達105MPa (15 000 psi)。根據項目要求,水下控制模塊的控制對象從1路到最多可達16路。水下電子模塊均采用雙冗余結構,所有設備均具有標準的工業接口。它采用1根中間鎖緊軸的形式,利用專用工具和水下機器人將水下控制模塊整體安裝到水下設備上。

圖1 FMC公司的水下控制模塊
1.2.2 Aker Solution公司的水下控制模塊
圖2為Aker Solution公司雙軸鎖緊式水下控制模塊。該模塊的設計可用于2 000 m以內的水深作業,而控制對象最多可擴展到16路,壓力最高可達69 MPa(10 000 psi)。采用雙鎖緊軸鎖緊的形式,鎖緊可靠,適合于較淺海水使用;安裝回收容易,其內部只配1個電子模塊,結構簡單,維護方便。
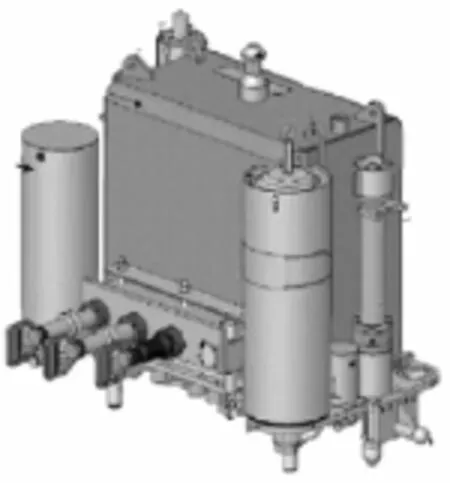
圖2 Aker Solution公司的水下控制模塊
1.2.3 應用分析
各大公司目前選用的水下控制模塊以復合電液型為主,該技術目前相對最成熟并且性能也比較穩定,內部所配置的元件也基本成熟,在全電控型(主要是水下電控型執行機構)未取得顯著成效與成本優勢前,復合電液型的水下控制模塊仍將持續很長一段時間。
2 水下控制模塊設計
常規的水下控制模塊由電氣SEM、液壓閥組、電氣及液壓接頭、保護罩4部分組成,如圖3。由于整個水下控制模塊始終處于高壓下的流動海水環境中,所以水下控制模塊的設計需要綜合考慮密封、腐蝕、定位、鎖緊、對外接口等因素。水下控制模塊通常獨立安裝在采油樹上,所以整個設計注意以下幾個要點:

圖3 典型的水下控制模塊
1) SCM內的SEM和液壓閥件及外部的密封裝置要有高可靠性。
2) 水下控制模塊要有良好的可拆卸性、再安裝性。
3) 水下控制模塊的鎖緊機構要具有良好的操作性。
2.1 相對成熟的設計工藝
在整個水下控制模塊中,并非所有的設計都是技術難點,每個設備均是由大部分的基礎設計及若干核心技術構成的,對于基礎性設計對象,研發中進行適度關注,主要增加防腐方面的內容即可。
2.1.1 封裝系統
水下控制模塊通常置于1個密封的腔室內,該密封腔主要提供對內部元件的一次壓力保護,內部的元件承擔二次壓力。對于封閉系統,首要考慮密封、溫度、壓力、海水腐蝕和海水流動等因素的影響,其次是安裝的便攜性及可靠性。具體體現在強度、密封、工作壓力、工作環境腐蝕等方面,其中強度、密封與工作壓力屬于相當成熟的工藝,只需在各個設計環節加入環境腐蝕因素即可,包括水下控制模塊內部的防腐因素,防止因外密封的失效進入海水后造成的腐蝕。
2.1.2 鎖緊裝置
該裝置在整個水下控制模塊中屬于標準件,可以根據作業方式進行選擇即可,在選擇中主要注意水下機器人ROV操作的便利性。
2.1.3 水下控制模塊基座及耦合盤
水下控制模塊基座及耦合盤是承載各種閥件、液壓快速接頭及電氣接頭的載體,密封、強度、防腐(材料)及加工精度均是屬于當前成熟的技術與工藝范疇。由于閥件眾多,大多采用板式閥塊,通道比較復雜,內部元件布局的合理性是該部件設計的重點方向。
2.2 核心設計
水下控制模塊的功能描述起來并不復雜,液壓及電氣方面的原理圖相對一些系統來說還是比較簡單的。而水下控制模塊的所有功能均是通過性能可靠的硬件和基于硬件的軟件組態實現的,其硬件組態主要包括水下電子模塊SEM、通信模塊、電磁換向閥和電液附屬元件。由于這些部件所處位置的特殊性及重要性,其可靠性是重要的指標,而可靠性主要從2個方面來實現:一是冗余性設計;二是元件本身的質量可靠。
2.2.1 水下電氣模塊SEM
水下控制模塊的所有功能均是通過水下電氣模塊(SEM)來發出或接收指令實現的,SEM的組成如圖4。它的設計既涉及到冗余性設計,又涉及到所選電子元件的質量,由于SEM空間有限,所有的功能需盡可能集成,而集成電路是一個比較好的選擇,集成電路的設計則是SEM的設計核心。
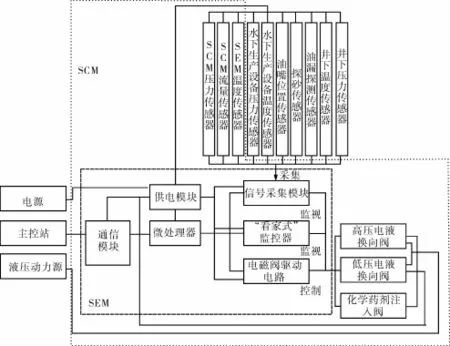
圖4 典型SCM控制原理
總體來說,水下電子模塊SEM應具備的功能為[8]:
1) 數字開關量的輸出。
2) 模擬信號的采集和轉化。
3) 簡單數據處理。
4) 與上位機的通信。
2.2.2 電磁換向閥
電磁換向閥(如圖5)是水下控制模塊中最重要的執行元件,它是直接控制采油樹上各種關斷型閥門及水下節流閥的閥件,它的性能直接反應了操作的可靠性。而對該電磁換向閥,除了要考慮到電路的冗余外,還要考慮它的功耗、散熱性。目前在水下電磁換向閥的研發上,已有多家國外公司走在前沿,已有多款符合要求的產品用在眾多的水下模塊中,如BIFOLD,SUBSEACOMPONENTS等公司。因此,該元件的設計主要在于選型,當然后期的產品國產化中該零件也是重要研發對象。

圖5 電磁換向閥
2.2.3 水下快插接頭
深水應用的水下快插接頭除需滿足其本身的快速連接功能外,還需排除在插撥過程中海水對介質的污染。圖6是Subsea Components公司的快速接頭,此類接頭屬于自密封結構,分別安裝在水下控制模塊的基座及耦合盤上[4]。

圖6 液壓快插接頭
2.2.4 電纜接頭
電纜接頭在水下的應用越來越多,根據工藝要求必須滿足水下直接插撥的要求,重點在于水中插拔時海水不能進入插頭里影響電器系統的正常工作。深水用直接插撥式電纜接頭連接結構如圖7所示。

圖7 深水用直接插撥式電纜接頭連接結構
3 水下控制模塊的測試
水下控制模塊經過設計及裝配后,除了經過研發中的有限元分析外,在陸地上嚴格而又完備的測試是必要的。具體如以下4個方面:
1) 功能測試。各種閥的開關測試,通訊與監控測試,各種傳感器測試,故障自動切換測試,數據存儲測試。
2) 極限性能測試。液壓閥的開關次數測試,接頭的插撥次數測試,電壓、電流負載測試,溫度測試,SEM模塊老化測試,振動測試,腐蝕測試,壓力測試,內泄漏測試,信號衰減、干擾測試。
3) 連接測試。各種接頭的對接測試,外部接口的操作(ROV工具)測試,SCM水下作業測試。
4) 最終聯調。包括海試。
4 結論
1) 水下控制模塊是水下控制系統中水下部分的最核心控制單元,也是技術含量最高的單元,它的可靠性決定了后期的維護成本,而每一次維護的直接與間接費用均接近或超過該單元的費用。因此,水下控制模塊的可靠性是其最關鍵的一個技術指標,所有的設計及制造均需以此為第一要素。
2) 水下控制模塊的各部分均有其常規與核心技術部分,在進行研發時,充分利用好常規技術,適當地引用核心技術進行消化吸收,縮短研發時間,提高研發效率。
3) 水下控制模塊是一個要求高可靠性的設備單元,為了保證這一核心要求,進行各種完備的功能測試及性能測試是必不可少的。
[1] 張豐功,王定亞,李磊,等.水下控制模塊的技術分析與發展建議[J].石油機械,2013,41(6):59-62.
[2] 朱高磊,趙宏林,段夢蘭,等,水下采油樹控制模塊設計要素分析[J].石油礦場機械,2013,42(10):1-6.
[3] 張理.水下生產控制系統設計探討[J].中國造船,2010,51(2):185-191.
[4] 王俊明.測試用水下采油樹控制模塊研究[D].哈爾濱:哈爾濱工程大學,2013.
[5] API 17D,Design and Operation of Subsea Production Systems-SubseaWellheadandTreeEquipment [S].2011.
TE952
B
10.3969/j.issn.1001-3482.2015.07.026
1001-3482(2015)07-0101-04
①2015-03-13
李 波(1970-),男,河南項城人,高級工程師,主要從事油氣田項目管理工作。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04