基于模糊神經網絡的AUV航跡規劃?
2015-08-07 12:11:06劉洲洲
微處理機 2015年3期
劉洲洲
(西安航空學院,西安710077)
基于模糊神經網絡的AUV航跡規劃?
劉洲洲
(西安航空學院,西安710077)
自主式水下機器人Autonomous Underwater Vehicles(AUV)是對深水環境進行開發和探測的重要工具。將模糊邏輯和人工神經網絡相結合,形成模糊神經網絡系統,并增加了神經網絡辨識器,使其具有先進的知識學習能力和并行數據處理能力,提高了AUV航跡規劃時的自適應性,然后通過仿真實驗證明了其優越性。
航跡規劃;模糊邏輯;人工神經網絡;模糊神經網絡
1 引 言
自主式水下機器人AUV(Autonomous Underwater Vehicles)是對深水環境進行開發和探測的重要工具。如何對AUV進行航跡規劃已經成為學術界的研究熱點。
神經網絡具有優秀的自適應學習和并行計算能力,模糊集則具有近似人的If-then模式的思維和推理規則。模糊集最早是由S.C,Lee和E.T.Lee于1974年引入神經網絡的,YamaKawa于1993年提出了模糊神經元的概念,并開啟了研究模糊神經網絡的時代[1]。
這里將模糊邏輯和人工神經網絡相結合,形成模糊神經網絡控制器(FNNC),增加了神經網絡辨識器,使其具有先進的知識學習能力和并行數據處理能力,提高了AUV航跡規劃時的自適應性,并通過仿真實驗證明了其優越性。
2 模糊神經網絡
神經元的基本模型如圖1所示,為非線性的多輸入單輸出模塊[2],可用式(1)表示。
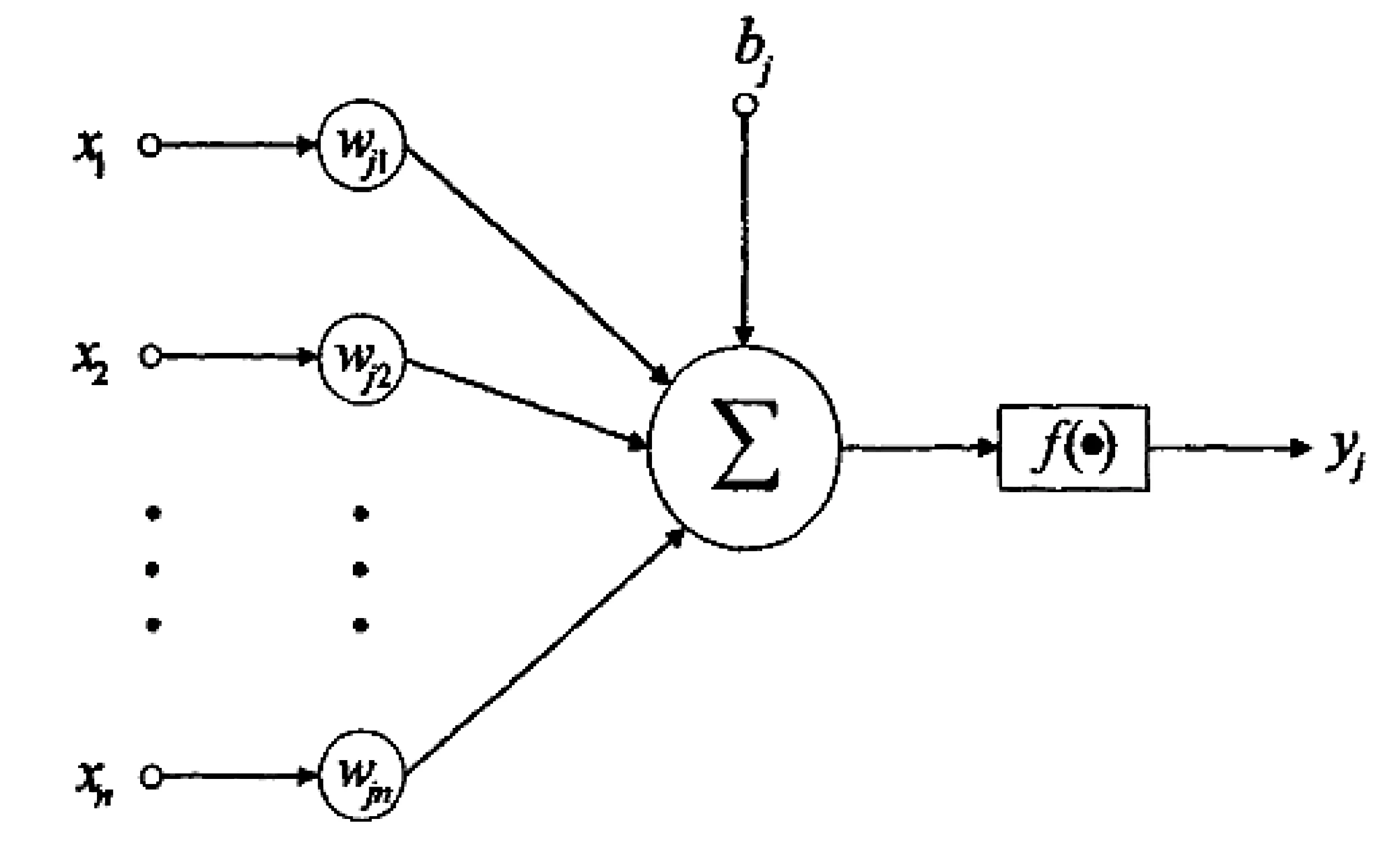
圖1 神經元的基本模型

2.1 模糊神經網絡結構
網絡采用多層前向網絡結構,共有五層,如圖2所示。
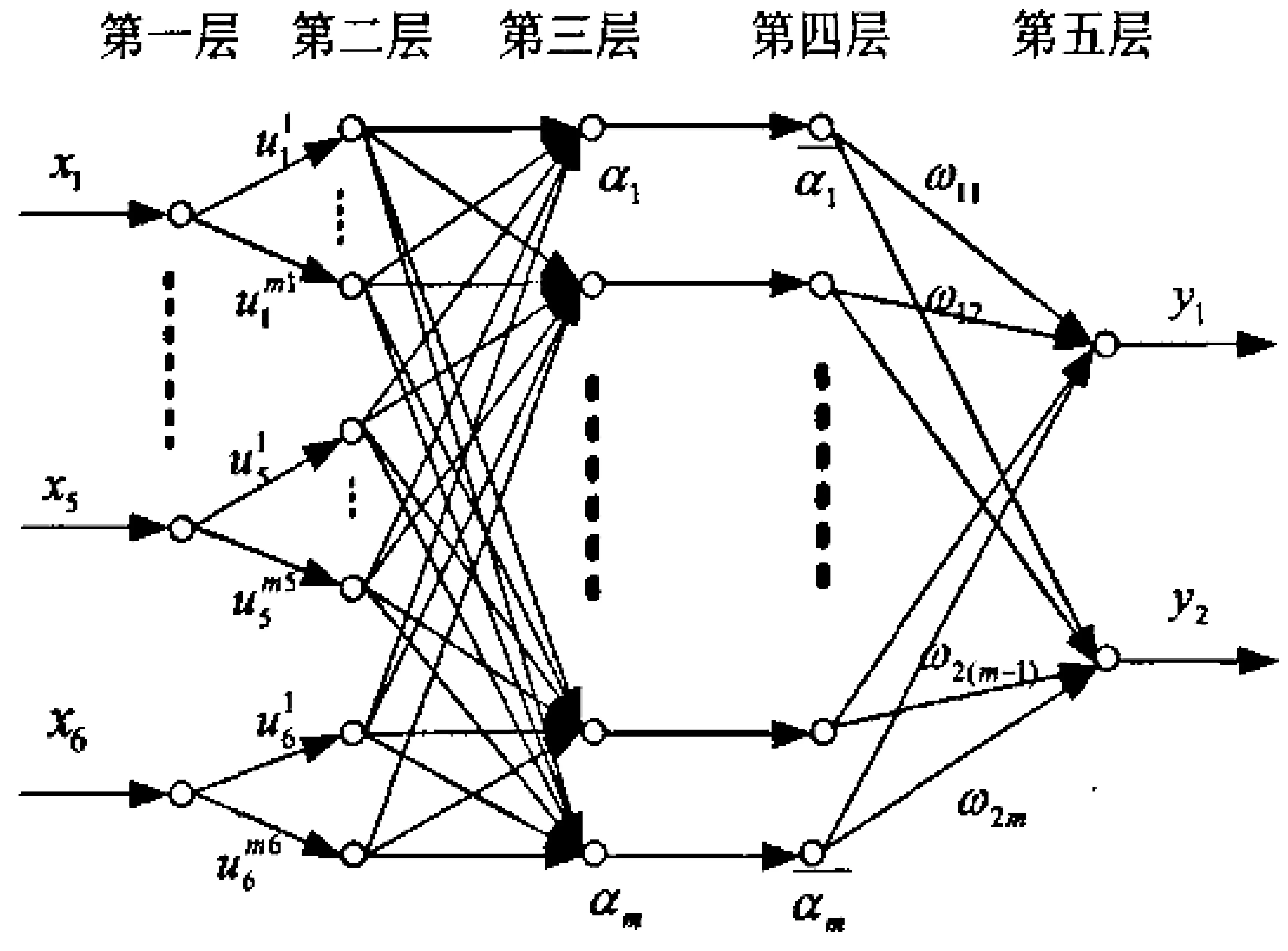
圖2 模糊神經網絡結構圖

第一層:輸入層。作用是將輸入變量傳遞到下一層,這里共有6個輸入語言變量,即=xi,且連接權是1。
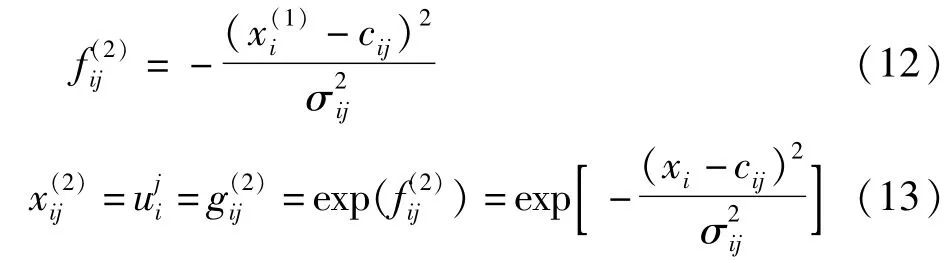
第二層:模糊化層。作用是模糊量化所有輸入變量。這里用高斯函數作為徑向基數,即:

第三層:規則層。本層的節點均為規則節點,用于表示模糊邏輯規則。作用是各條規則的適應度計算,各節點進行如下操作:

本層的連接權設為1。
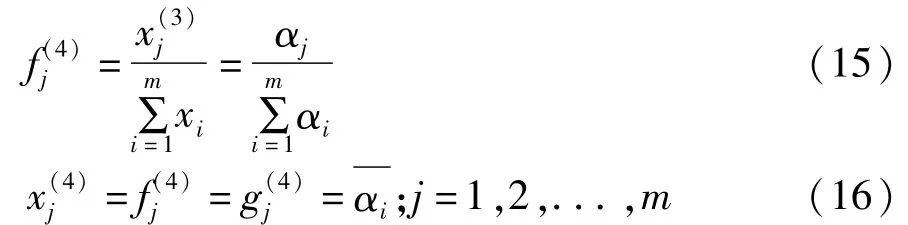
第四層:本層的網絡結構用來定義各個規則節點,并對其結論進行歸一化,即:

第五層:輸出層,輸出控制規則。

2.2 模糊神經網絡辨識器設計
為了預測神經網絡的控制效果,引入了神經網絡辨識器,以提高學習收斂速度和系統穩定性[4]。當模糊神經網絡系統進行辨識時,采用下式:

其中,u(k)和y(k)分別代表系統的輸入和輸出,f{.}是非線性函數。
為保證系統的穩定性,采用串-并聯模型:

離線學習的信號集為:

其中,X(k)={y(k),y(k-1),...,y(k-n+1),u(k),u(k-1),...,u(k-m+1)};u(k)為激勵信號;Rand(1)表示[-1,1]之間均勻分布的隨機數;A表示信號幅值。
2.3 學習方法
代價誤差為:

其中,ydi為期望輸出值,yi表示實際輸出值。
各層的節點函數計算如下[5]:
第一層:

第二層:
式中,i=1,2,...,6;j=1,2,...,mi
第三層:

第四層:
第五層:

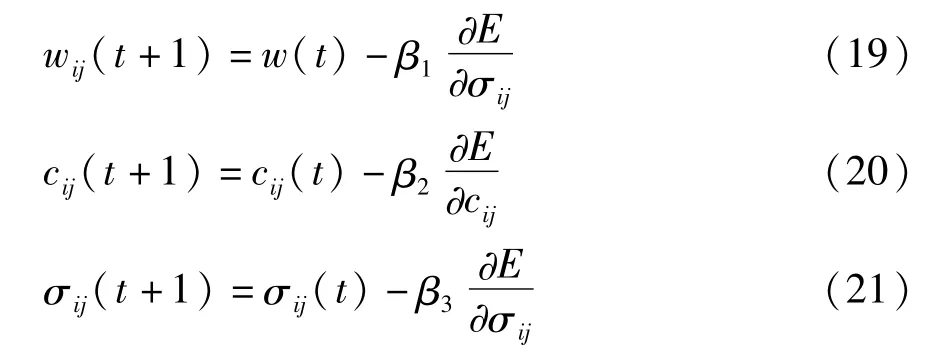
參數調整的算法如下[6]:
3 基于模糊神經網絡的AUV航跡規劃
3.1 環境信息的處理
實驗中,AUV必須先探測障礙信息,本實驗用5個聲納傳感器,各傳感器相鄰夾角為30度。
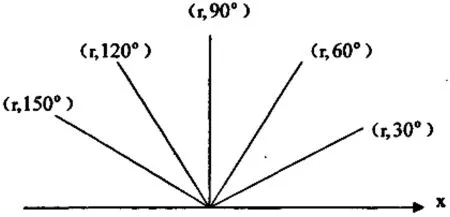
圖3 傳感器分布圖
目標點P(Xs,Ys),機器人位置(x,y)。則:

機器人與目標點的相對角度為:

3.2 仿真實驗
采用上述算法進行仿真實驗,設學習速率β1=β2=β3=0.5,根據障礙物的密集程度不同,分別進行實驗,仿真結果如圖4-圖6所示。

圖4 環境1仿真圖
可以看出,AUV成功避開了障礙物,順利到達目標點,驗證了算法的可行性和優越性。
4 結束語
神經網絡具有優秀的自適應學習和并行計算能力,模糊集則具有近似人的If-then模式的思維和推理規則。這里將兩者相結合,形成模糊神經網絡控制器(FNNC),其具有先進的知識學習能力和并行數據處理能力,提高了AUV航跡規劃時的自適應性。并通過仿真實驗證明了其優越性。
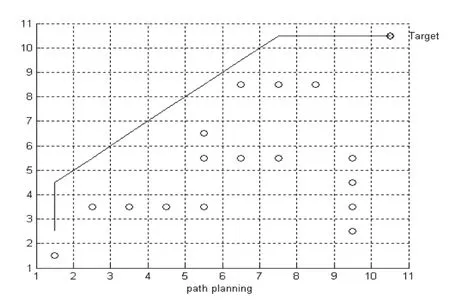
圖5 環境2仿真圖
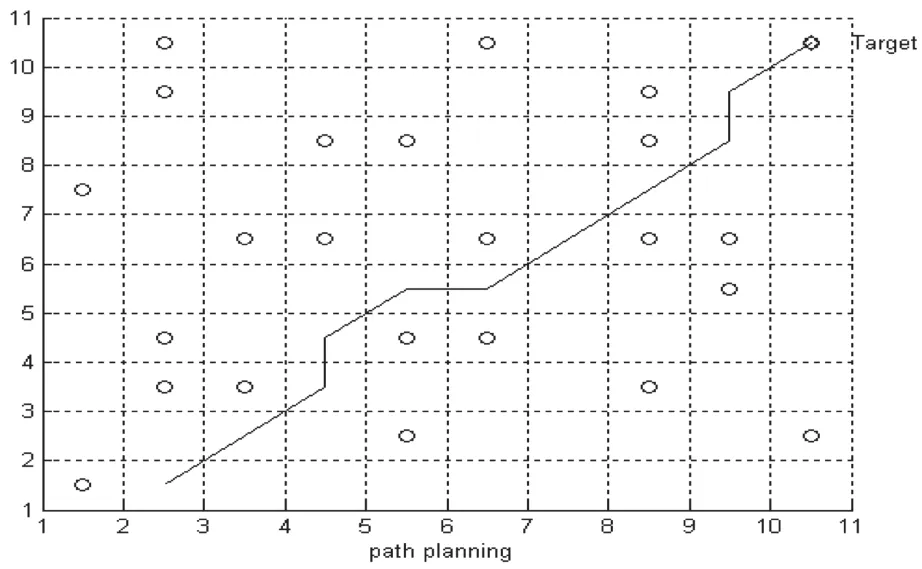
圖6 環境3仿真圖
[1] 張福斌.水下航行器導航系統設計及誤差分析[D].西安:西北工業大學,2002.
[2] Hagen,Anonsen,ManetM.The HUGIN real-time terrain navigation system[C].Oceans 2010.Kjeller,Norway 2010:1-7.
[3] 王越,曹長修.BP網絡局部極小值產生的原因分析及避免方法[J].計算機工程,2002,28(6):35-37.
[4] Chin Tengline,C.S.Geroge Lee.Neural network based fuzzy logical control and decision system[J].IEEE Trans.On Computer,1991,40(12):1320-1326.
[5] Du Toit,Burdick JW.Robotmotion planning in dynamic uncertain environments[J].IEEE Transactions on Robotics,2012:101-115.
[6] Pepijin W J,Daniel Toal,Neural networkcontrol of underwater vehicles[J].Engineering Application of Artificial Intelligence,2005(18):533-547.
AUV Path Planning Based on Fuzzy Neural Network
Liu Zhouzhou
(Xi’an Aeronautical University,Xi’an 710077,China)
Autonomous Underwater Vehicles(AUV)is a kind of economical vehicle for detecting and exploring the underwater resource.Combined the fuzzy logic with artificial neural network,the fuzzy neural network system is formed and the neural network identifier is added.The system has the advanced capabilities of learning and processing for the parallel data.Italso improves the adaptability of AUV track planning and the simulation test proves its superiority.
Path Planning;Fuzzy Logic;Artificial Neural Network;Fuzzy Neural Network(FNN)
10.3969/j.issn.1002-2279.2015.03.013
TP24
A
1002-2279(2015)03-0043-03
國家自然科學基金資助項目(61103242)
劉洲洲(1981-),男,山西運城人,博士研究生,講師,主研方向:傳感器網絡,系統仿真。
2014-08-11
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
領導決策信息(2018年50期)2018-02-22 06:17:16
Coco薇(2017年11期)2018-01-03 20:59:57
商周刊(2017年5期)2017-08-22 03:35:26
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
中國衛生(2016年2期)2016-11-12 13:22:16
發明與創新(2016年38期)2016-08-22 03:02:52
