基于模糊積分預測控制的船舶動力定位系統設計
2015-08-11 00:51:51崔戈
船舶 2015年3期
崔 戈
(中國人民海軍裝備部艦艇部 北京100841)
基于模糊積分預測控制的船舶動力定位系統設計
崔 戈
(中國人民海軍裝備部艦艇部 北京100841)
[摘 要]提出一種基于模糊積分預測控制器的船舶動力定位系統控制方法,通過引入積分控制器消除了穩態誤差,采用模糊控制算法實現了對不確定系統的控制,利用預測控制解決了船舶動力定位中的約束問題,有效地減少了船舶動力定位系統能量的消耗。仿真結果證明,提出的模糊積分預測控制器在滿足動力定位要求的同時,大大提高了推力系統的效率,減少了推力消耗。
[關鍵詞]模糊控制;積分控制;預測控制;動力定位
引 言
船舶動力定位系統是一個復雜的控制系統,由位置參考系統、推力系統、測量系統等組成,其控制原理是利用誤差消除誤差的思想。在控制算法中,李卓等人[1]介紹了一種基于非線性PID控制器在船舶航向控制系統中的研究,改進了傳統PID控制算法在船舶航向控制中的不足。劉振業等人[2]采用模糊自適應ADRC算法對船舶航向進行了有效控制,增強了航向控制的自適應性。在動力定位控制算法的研究中,王元慧[3]提出了一種模型預測控制算法。該算法通過將預測模型、滾動優化、反饋校正等一系列控制思路應用到算法中,以此實現對船舶動力定位系統的優化控制。此種算法對于船舶動力定位系統中存在的各種約束問題提供了很好的解決方案,實現了以最優控制算法為基礎的最優化控制;熊衛衛[4]在文獻[3]的基礎上提出了模糊控制算法,通過將模糊控制器與預測控制器的有效結合,可以在很大程度上控制系統的不確定性。當處理的數學模型難以建立精確的控制對象時,能夠首先將對象模糊化之后再應用預測控制進行控制,從而提高控制的有效性。
本文在文獻[3]與文獻[4]的基礎上引入積分控制器。其中,控制算法中的預測控制功能可以通過對被控對象的歷史信息和未來輸入進行綜合分析,預測出被控系統在下一階段的輸出;而引入的積分環節能夠達到PID控制器的效果,減少穩態誤差,從而彌補預測控制的不足。結合預測控制中的滾動優化、反饋校正,便能很好地解決PID控制器的不足,實現以最優控制理論為基礎的控制策略。
1 船舶動力定位系統控制原理
動力定位系統是通過控制系統對測量系統所測量的數據進行處理,向推力系統發出控制命令,從而實現對外界環境干擾力的補償,使得船舶、海洋石油鉆井平臺等海洋環境工作平臺能夠保持在設定的舷向,并懸停在水中。動力定位系統在海洋開發中起到了不可替代的作用,不僅不受海水深度的影響,而且能夠對海洋環境的變化快速響應,機動性強。其工作原理如圖1所示。
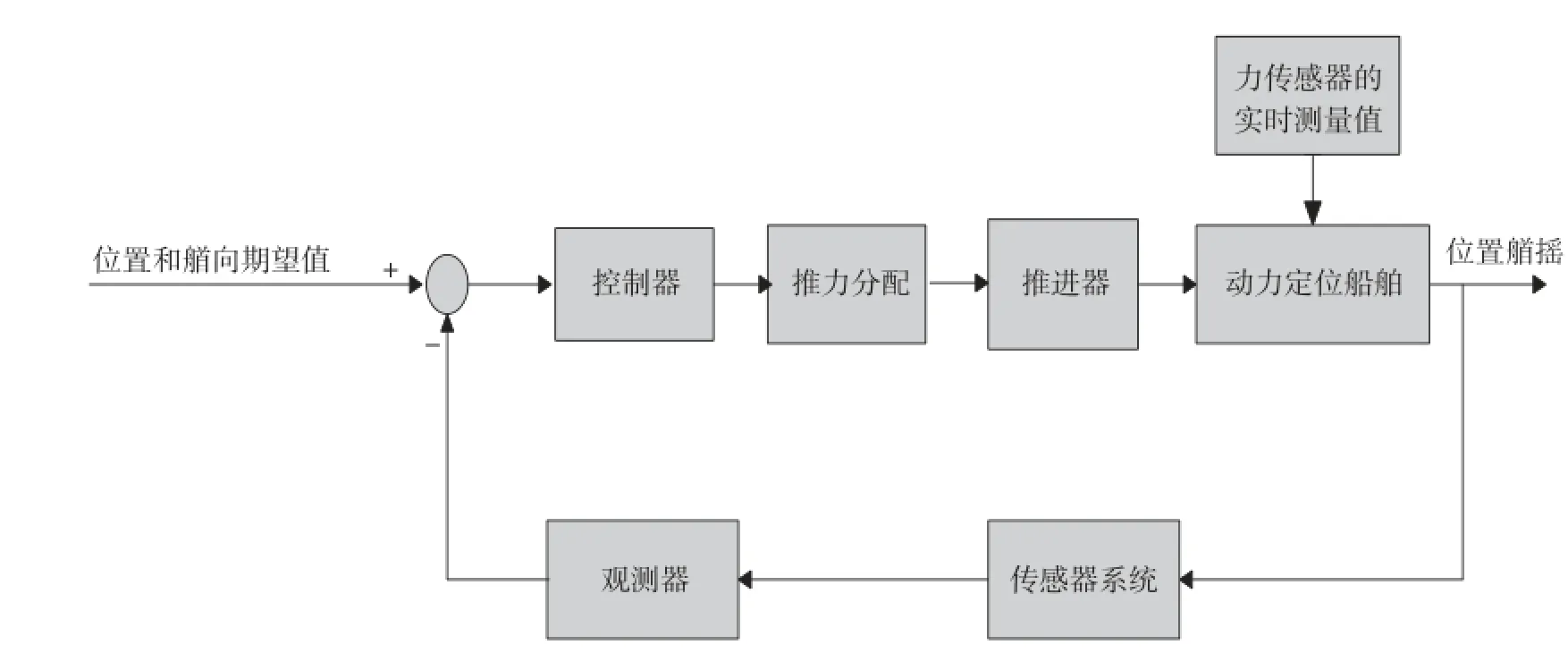
圖1 動力定位系統原理圖
2 模糊積分預測控制器設計
2.1 模糊控制
模糊控制器包含兩個輸入信息,分別為預測的船舶位置輸出誤差E和對應的誤差變化率EC,見圖2。模糊控制器包含一個輸出信息,即推力U。其中:E、EC和U的論域均取為[-6,6],狀態詞集取為{負大、負中、負小、零、正小、正中、正大},上述狀態詞集分別用如下代碼表示,即{NB、NM、NS、ZO、PS、PM、PB}。

圖2 模糊積分預測控制實現動力定位的原理圖
采用簡單且具有一般性的三角函數表示輸入、輸出的隸屬度函數,該函數曲線如圖3所示。[4]
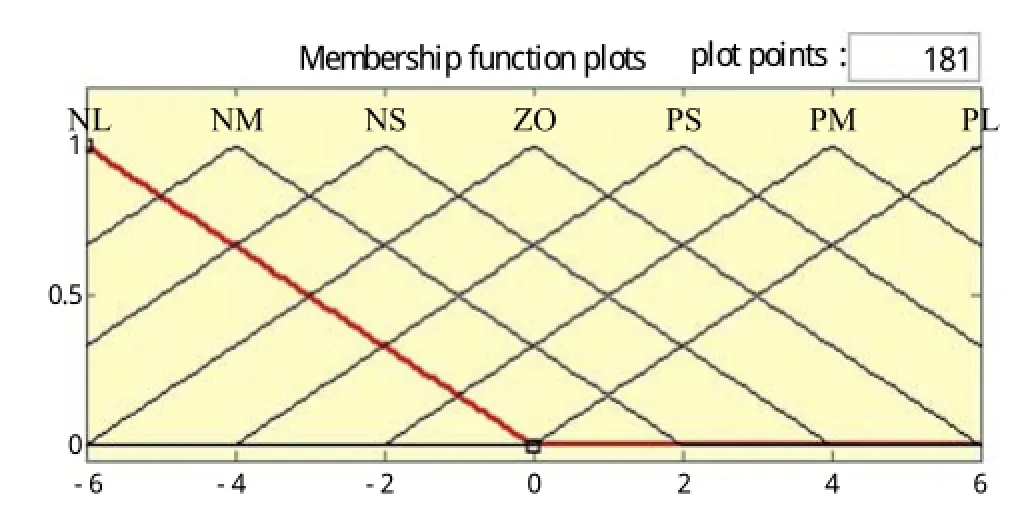
圖3 輸入、輸出變量隸屬函數的分布圖
模糊控制器是一種按照人的直覺進行推理的語言表現形式,主要依據專家所學知識或熟練操作人員長期積累的工程經驗。模糊控制的應用規則通常由一系列具有某種關系的連接詞表達出來,如if-then、else、also、and、or等。本文對于船舶的縱蕩、橫蕩和首搖的控制規則即采用“if-then”的表達形式,如表1所示[4]。
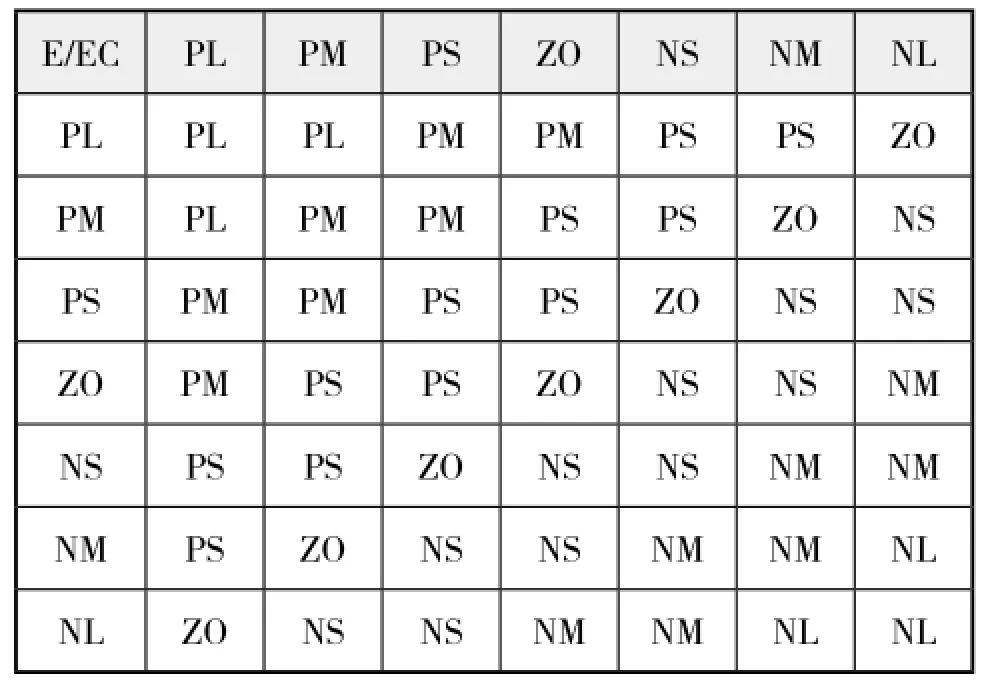
表1 模糊控制規則表
對于模糊控制器的輸出,采用加權平均法進行解模糊。
2.2 模型模糊預測控制
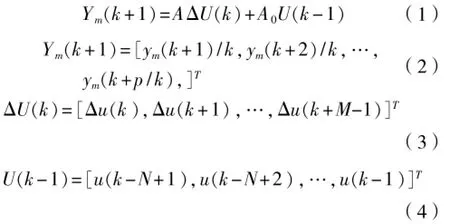
2.2.1 預測模型[4]
2.2.2 約束條件
考慮到半潛式平臺使用的推力器形式為全回轉推力器,可以將推力器發出的推力分解為x和y兩個方向,分別用Tx、Ty表示,這樣推力的大小與方向可以同時表達。另設變量:

約束處理的辦法:
可將上述約束條件寫成式(6)的形式:

2.2.3 滾動優化
通過滾動優化的形式,對某一控制序列進行在線求解,使得該項性能指標在約束條件下取得最小值,在每個采樣時刻k,重復進行如下步驟:借助參考系統和傳感器的測量得出某一采樣時刻k的狀態xk,并將此狀態作為開環優化問題的初始條件(x0= xk), 用x0求解開環有限時域區間內的優化問題,使得某項性能指標在約束條件內取得最小值,從而得到最優控制序列

將該序列中的第一個元素作為當前的控制作用狀態函數。
3 仿真試驗
3.1 船舶參數[5]
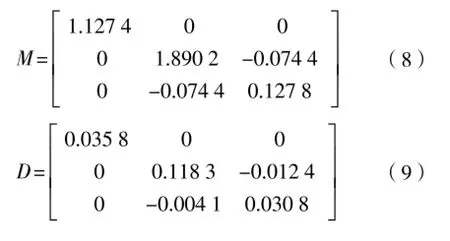
本文基于某DP鉆井平臺進行動力定位控制系統仿真研究。該船主要參數為:總長76.2 m、寬18.8 m、高82.5 m、吃水6.25 m、凈重4 200 t、主機功率3 533 kW。經過多次大規模海試,得到該平臺的模型參數。其中,無因次的質量矩陣M和阻尼矩陣D為:
3.2 船舶約束
仿真試驗中施加的約束大小如表2、表3所示。

表2 平臺推力器限制

表3 平臺操作禁區
3.3 仿真結果
本文作如下假設,即平臺處于無風靜水的仿真環境中。設平臺所處的初始位置坐標為(0,0,0),期望位置坐標為(100,100,0),仿真持續時間為500 s。根據上表給出的推力器限制和操作禁區等約束條件, MPC參數控制時域為2、預測時域取50,得到平臺的縱蕩、橫蕩、首搖角以及推力器推力的仿真圖如圖4 -圖9所示。
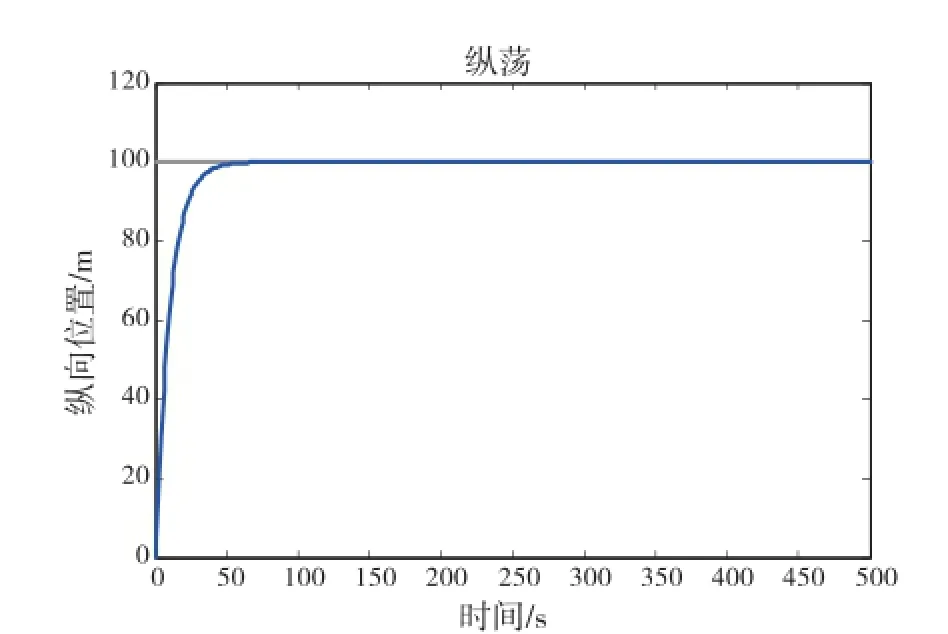
圖4 基于模糊預測控制器的縱蕩位置輸出
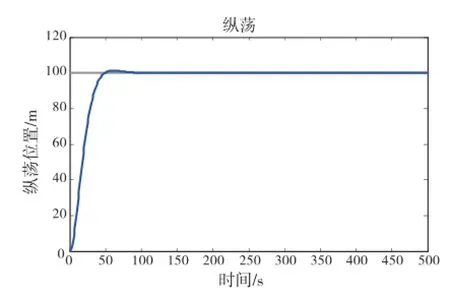
圖5 基于模糊預測積分控制器的縱蕩位置輸出
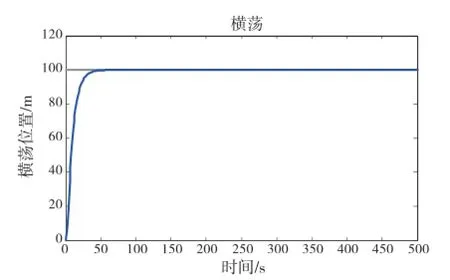
圖6 基于模糊預測控制器的橫蕩位置輸出
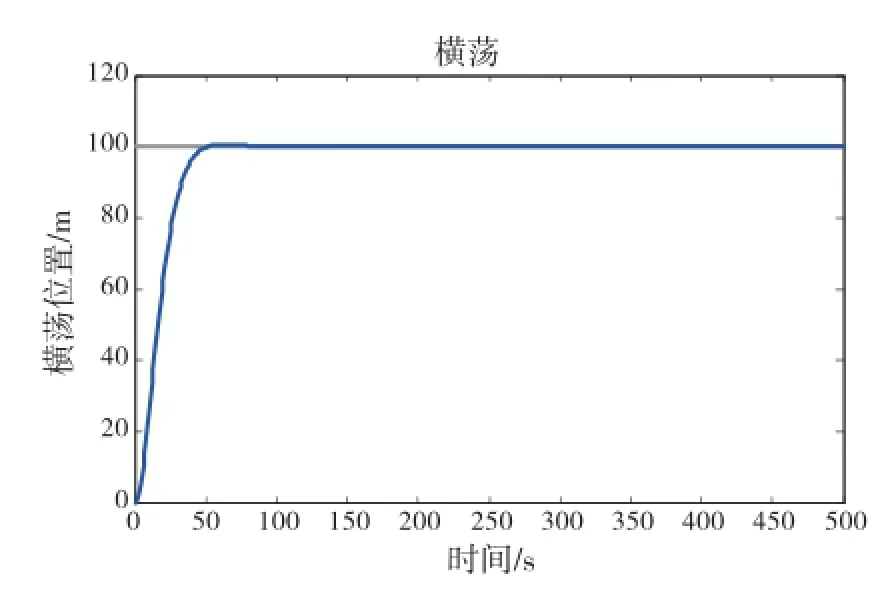
圖7 基于模糊預測積分控制器的橫蕩位置輸出
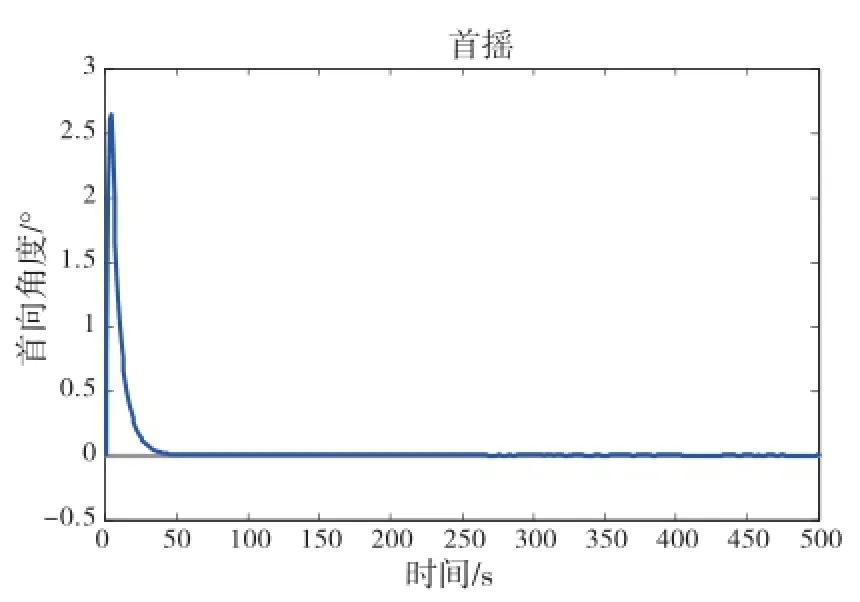
圖8 基于模糊預測控制器的首搖角輸出
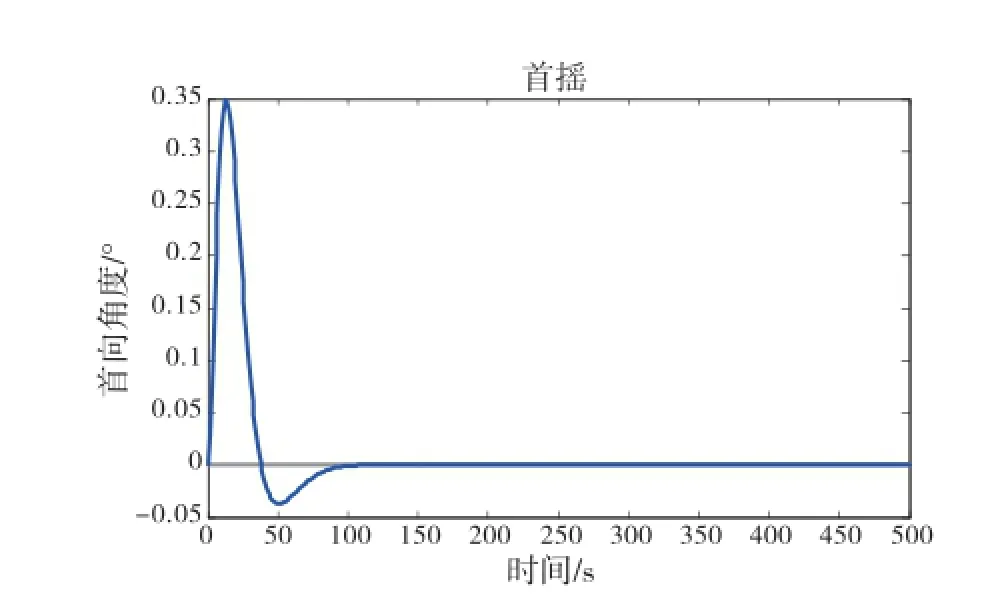
圖9 基于模糊積分預測控制器的艏搖角輸出
由圖4 -圖9可知,加入積分環節后,系統各位置的輸出均出現微小的超調量,調整時間變化不大。在首搖角輸出中,加入積分環節后,首搖角的變化比較平緩,增加了動力定位平臺的穩定性,調整時間變大,能達到平臺動力定位的目的。
通過如圖10 -圖15的仿真曲線可知,采用模糊預測控制法時,縱蕩方向上推力起始值為7.0×108N,經過25 s達到穩定且值為0;橫蕩方向上推力起始值為3.0×107N,經過27 s達到穩定且值為0 ;首搖方向上推力起始值為3.2×106N,經過2 s突變到15×106N,25 s后達到穩定且值為0。
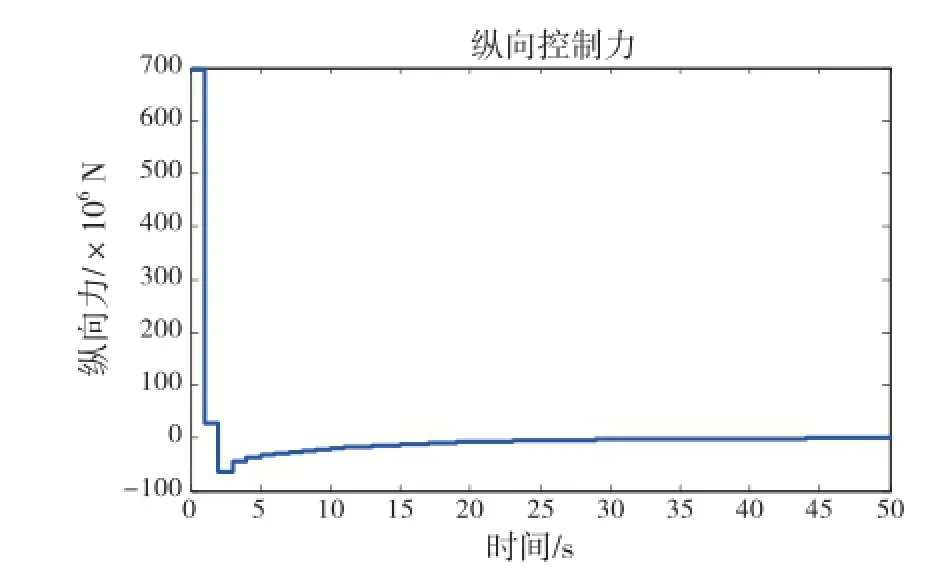
圖10 基于模糊預測控制器的縱向控制力輸入
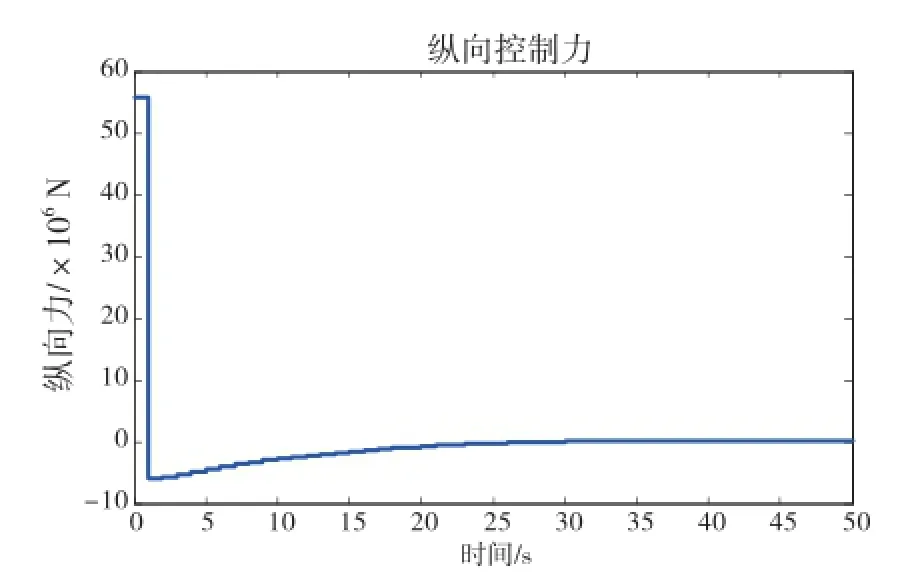
圖11 基于模糊預測積分控制器的縱向控制力輸入
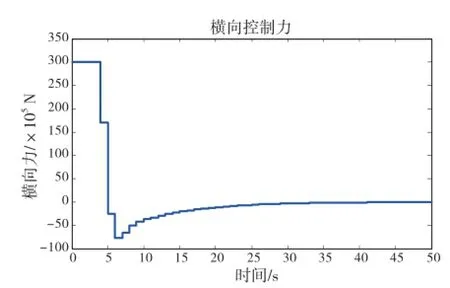
圖12 基于模糊預測控制器的橫向控制力輸入
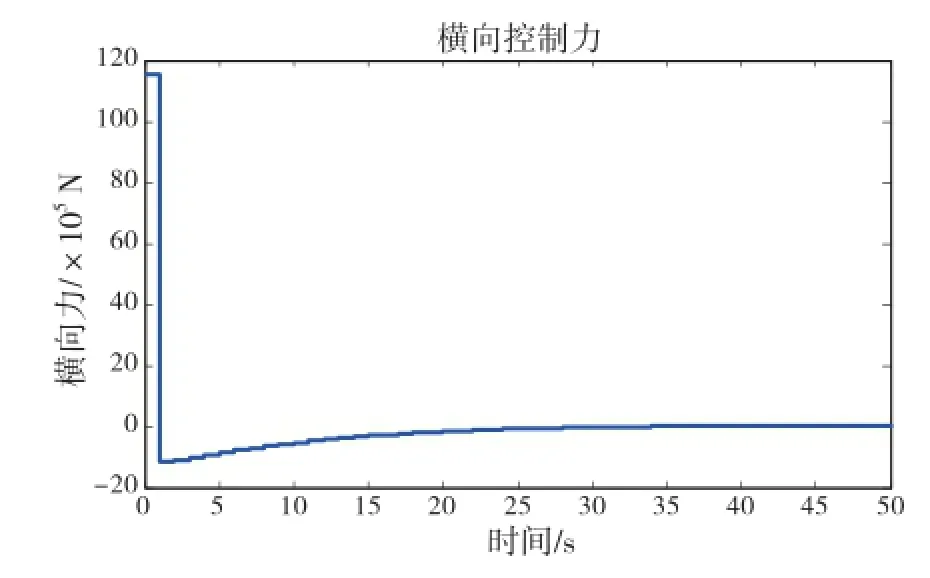
圖13 基于模糊積分預測控制器的橫向控制力輸入
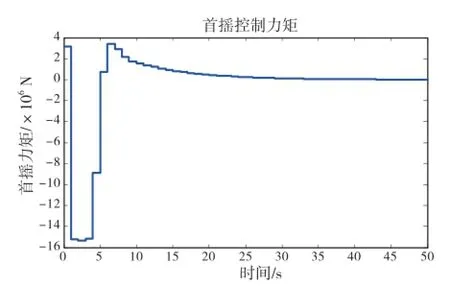
圖14 基于模糊預測控制器的首搖控制力矩輸入
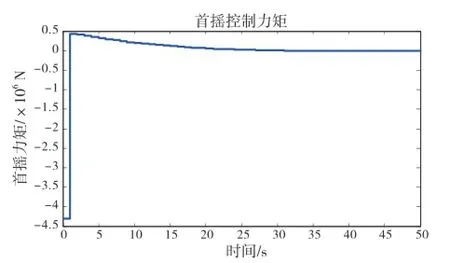
圖15 基于模糊積分預測控制器的首搖控制力矩輸入
采用模糊積分預測控制法時,縱蕩方向上推力起始值為5.6×107N,經過25 s達到穩定且值為0;橫蕩方向上推力起始值為1.15×107N,經過25 s達到穩定且值為0;首搖方向上推力起始值為4.3×106N,經過23 s達到穩定且值為0。縱蕩、橫蕩方向的推力值相對于未加積分環節時已大大減小,首搖角方向上的推力加入積分環節后起始值變大,但未發生突變,變化較平滑。
從仿真曲線的變化范圍可以看出,在沒有引入積分環節時,縱向推力、橫向推力、首搖角控制力矩的大小變化范圍較大,加入積分環節后仿真曲線較為平滑。較大的幅度變化是由于電機推進產生了高峰值的推力,這種峰值推力會對齒輪造成瞬間沖擊,影響安全性。因此,必須對螺旋槳的轉速進行必要的約束,而平滑的推力變化不僅能對齒輪起到保護作用,對節約能源也有好處。采用模糊積分預測控制,推力的變化范圍明顯比采用模糊預測控制要平滑,表明推力器耗能減少,不僅降低了船舶的功率消耗,有效控制了推力系統中齒輪損壞現象,提高了動力定位的經濟性和設備使用壽命,獲得了良好的控制品質。
4 結 論
本文在模糊預測控制的基礎上增加了積分控制,減少動力定位系統的能量消耗以及推力器的磨損,結合PID控制、預測控制和模糊控制的優點,最終取得了滿意的控制效果。
[參考文獻]
[1] 李卓,馬林立.基于一種非線性PID控制器的船舶航向控制系統研究[J]. 船舶,2004 (4):2-3.
[2] 劉振業,劉偉,付明玉,等.基于模糊自適應ADRC的全墊升氣墊船航向控制[J]. 信息與控制,2011(6):2-3.
[3] 王元慧. 模型預測控制在動力定位系統的應用[D].哈爾濱工程大學, 碩士學位論文,2006:17-20.
[4] 熊衛衛.基于模糊預測控制的船舶動力定位系統控制器研究[D]. 江蘇科技大學,碩士學位論文,2012:41-50.
[5] 王元慧,施小成,邊信黔.基于模型預測控制的船舶動力定位約束控制[J]. 船舶工程,2007(29):2-4.
[中圖分類號]U666.1
[文獻標志碼]A
[文章編號]1001-9855(2015)03-0103-06
[收稿日期]2015-01-13;[修回日期]2015-03-16
[作者簡介]崔 戈(1976-),男,工程師,研究方向:艦船工程。
Design of ship dynamic positioning system based on fuzzy integral predictive control
CUI Ge
(Naval Ship Department of Naval Armament Adminstry Beijing 100841, China)
Abstract:This paper presents a ship dynamic positioning control method based on the fuzzy integral predictive controller. An integral controller is introduced to eliminate the steady state error, while a fuzzy control is adopted to provide satisfi ed control for uncertain systems, and a predictive control is used to solve constraint problem in the ship dynamic positioning, which can effectively reduce its energy consumption. The simulation results show that the proposed fuzzy integral predictive controller can meet the dynamic positioning requirements with the improvement of propulsion effi ciency and the reduction of thrust consumption.
Keywords:fuzzy control; integral control; predictive control; dynamic positioning
