船用平臺羅經模擬器的設計
2015-08-14 21:06:41羅飛仁沈括汪銘東
現代電子技術 2015年15期
羅飛仁+沈括+汪銘東
摘 要: 為了在船用設備修理過程中提供可用的平臺羅經信號,介紹了使用于某設備的平臺羅經模擬器實現過程,該方案以單片機+FPGA+DSC模塊為核心,單片機實現人機交互,FPGA實現系統邏輯控制,DSC模塊生成平臺羅經信號。實測表明,該方法設計簡單,滿足船載設備的要求,可以實現轉速比為1[∶]36的粗精雙通道羅經信號模擬。
關鍵詞: FPGA; DSC; 羅經; 伺服系統
中圖分類號: TN802?34 文獻標識碼: A 文章編號: 1004?373X(2015)15?0060?03
Design of platform compass simulator for marine
LUO Feiren, SHEN Kuo, WANG Mingdong
(Unit 92932 of PLA, Zhanjiang 524016, China)
Abstract: To provide available platform compass signal in marine equipment maintenance process, the implementation of platform compass simulator used for a certain marine equipment is introduced. This system takes microcontroller, FPGA and DSC modules as control centre. Microcontroller is used to realize human?computer interaction, FPGA is used to implement system logic control, and DSC is used to generate platform compass signal. The actually measured results show that this system is simple to design and can meet the requirements of the marine equipment. It can realize rough channel and refined channel compass signal simulation, whose rotating speed ratio is 1[∶]36.
Keywords: FPGA; DSC; compass; servo system
0 引 言
由于艦船航行中,受到海浪影響,造成船體擺動,使雷達等設備平臺無法相對大地平面靜止,為保證使用精度,穩定雷達天線平臺,雷達必須使用平臺羅經數據,消除艦船搖擺的影響。
在船上,使用羅經數據需要協調多個部門,嚴重影響設備修理進度與修理、調試質量。為解決這一矛盾,本文針對某型號雷達特點,研制了適用于該雷達的平臺羅經模擬器。
1 原理
1.1 雷達穩定平臺原理
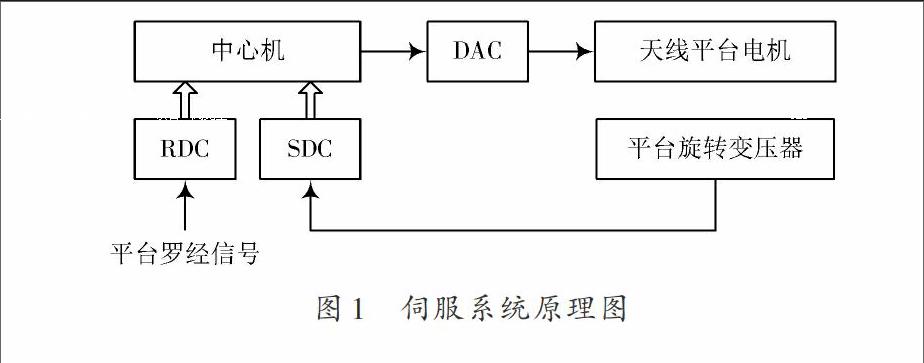
該型雷達使用粗精雙通道平臺羅經信號,進行船搖信號的隔離,伺服系統的原理圖如圖1所示。
伺服系統工作時,船搖RDC模塊將平臺羅經送來的橫搖、縱搖信號轉換為數字信號,送至中心機。同時,天線的俯仰角旋轉變壓器檢測天線當前的俯仰角度,并將該信號送到天線SDC模塊,轉換為數字信號后送至中心機。中心機接收到RDC模塊和SDC模塊數據后,對該數據進行比對、解算,計算出俯仰角度誤差,送至誤差DAC芯片輸出,用于驅動天線俯仰電機,向減小這種誤差的方向運動,克服船搖對天線的影響,保證天線平臺的穩定。
圖1 伺服系統原理圖
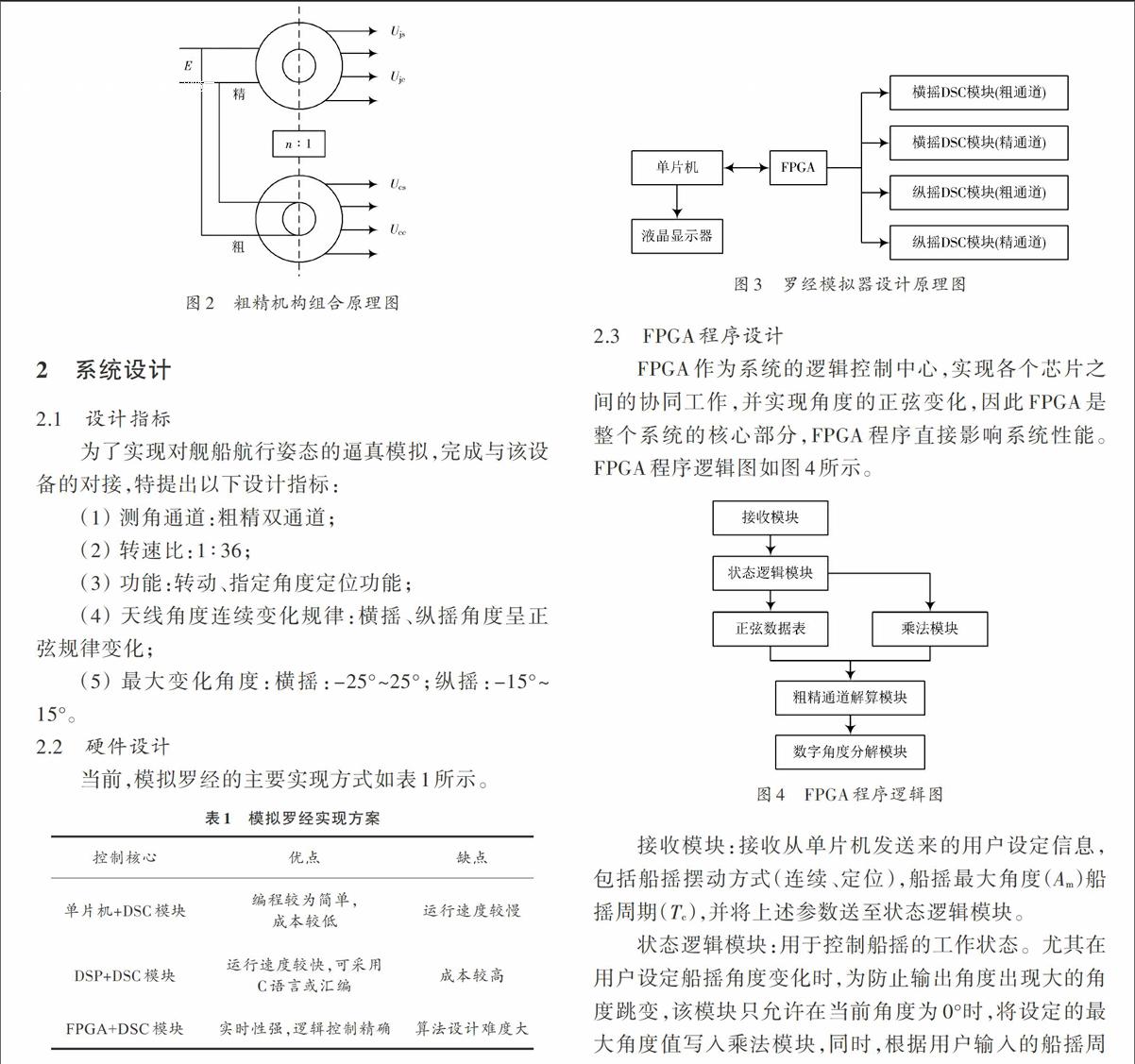
1.2 粗精機構測角原理
在單通道轉換器的測角系統中,轉換器的分辨力最終要受到測角元件制造誤差的限制。在許多測角精度要求較高的場合,這種轉換器難以勝任[1],而粗精雙通道測角由于采用了精通道數據進行校正,其測角精度是單通道測角系統的[N]倍[2?3]。粗精機構組合原理如圖2所示。
粗精機構組合的含義是粗示機構軸角轉過1圈時,精示機構軸角則轉過[n]圈[4],即由粗示確定軸角的粗略,由精示確定軸角的精確位置,粗精角組合得到真實的機械軸角[5]。
圖2 粗精機構組合原理圖
2 系統設計
2.1 設計指標
為了實現對艦船航行姿態的逼真模擬,完成與該設備的對接,特提出以下設計指標:
(1) 測角通道:粗精雙通道;
(2) 轉速比:1[∶]36;
(3) 功能:轉動、指定角度定位功能;
(4) 天線角度連續變化規律:橫搖、縱搖角度呈正弦規律變化;
(5) 最大變化角度:橫搖:-25°~25°;縱搖:-15°~15°。
2.2 硬件設計
當前,模擬羅經的主要實現方式如表1所示。
表1 模擬羅經實現方案
[控制核心\&優點\&缺點\&單片機+DSC模塊\&編程較為簡單,
成本較低\&運行速度較慢\&DSP+DSC模塊\&運行速度較快,可采用
C語言或匯編\&成本較高\&FPGA+DSC模塊\&實時性強,邏輯控制精確\&算法設計難度大\&]
在本設計中,由于需要實現橫搖、縱搖粗精通道的角度計算,同時使用的DSC為14位數字輸入,并且需要實現較好的人機交互,只使用單片機、DSP或者FPGA,雖然能完成該設計,但程序設計難度較大。所以為降低難度,簡化設計,本系統提出了單片機+FPGA+DSC模塊的硬件實現方案,系統原理圖如圖3所示。
系統設計中,利用單片機編程簡單,容易實現與液晶顯示器互連的特點,使用單片機作為控制中心,用于接收用戶設定的羅經運行數據,并且實現與FPGA的互連,實現當前橫搖、縱搖信息的實時顯示。利用FPGA強大的邏輯控制能力和大量的I/O管腳的特點,將FPGA作為系統的邏輯控制中心,用于實現對角度的計算,同時完成對角度粗精通道的分解,并將數據送至DSC模塊,實現角度的傳送。
圖3 羅經模擬器設計原理圖
2.3 FPGA程序設計
FPGA作為系統的邏輯控制中心,實現各個芯片之間的協同工作,并實現角度的正弦變化,因此FPGA是整個系統的核心部分,FPGA程序直接影響系統性能。FPGA程序邏輯圖如圖4所示。
圖4 FPGA程序邏輯圖
接收模塊:接收從單片機發送來的用戶設定信息,包括船搖擺動方式(連續、定位),船搖最大角度(Am)船搖周期(Tc),并將上述參數送至狀態邏輯模塊。
狀態邏輯模塊:用于控制船搖的工作狀態。尤其在用戶設定船搖角度變化時,為防止輸出角度出現大的角度跳變,該模塊只允許在當前角度為0°時,將設定的最大角度值寫入乘法模塊,同時,根據用戶輸入的船搖周期,控制對ROM表的查詢速度。
正弦數據表:根據設計需求,角度需要呈正弦變化,因此在FPGA中需要實現正弦計算。但對于FPGA而言,要實現正弦計算,需要進行單獨的算法設計,難度較大。基于正弦值的對稱性,將第一區間的正弦值存儲于ROM中采用查表法,通過讀寫順序的變化,獲取正弦值。該模塊采用狀態機實現,如圖5所示。
State1和State3為正序讀取ROM表,State1實現第一象限值,State3將讀取值進行反相實現第三象限值;State2和State4逆序讀取ROM表,State2實現第二象限值,State4將數據反相后實現第四象限值。
圖5 正弦數據表狀態機
乘法模塊:將用戶設定的最大船搖角度和查詢得到的正弦值相乘,實現[a(t)=Am×sin(2π×Δt),]其中,[a(t)]為計算得到的當前值。
粗精通道解算模塊:將乘法模塊計算得到的角度值,根據1[∶]36的轉速比,轉換為對應的粗精雙通道角度數據。
數字角度分解模塊:由于使用的DSC模塊為14位數字角度輸入,因此該模塊將粗精通道的角度數據分解成14位的數字角度值送到DSC模塊。
3 結 論
本文采用單片機+FPGA+DSC模塊的設計方案,以FPGA為控制核心,使用查表法實現正弦值計算,實現了粗精雙通道,轉速比為1[∶]36的羅經模擬器設計。經過實際測試,該系統滿足設計要求。
參考文獻
[1] 梁海波,張慶,高延濱.基于ARM7微控制器的雙速軸角/數字處理器的設計[J].應用科技,2008,35(3):46?49.
[2] 楊波.適用于粗/精同步機高精度測量系統雙速處理器的研制[J].佛山科學技術學院學報:自然科學版,2003,21(2):29?31.
[3] 徐大林,高文政.基于FPGA的多極旋轉變壓器粗、精數據組合雙速處理器的設計與實現[J].測控技術,2006,25(5):42?45.
[4] 王星民,郭盛杰.多極旋轉變壓器測角原理及實現方法[J].山西電子技術,2011(6):24?25.
[5] 張莉松,胡祐得,徐立新.伺服系統原理與設計[M].北京:北京理工大學出版社,2008.
[6] 任鵬會,鄭剛,麻紅梅.雙通道伺服系統的數字化實現[J].現代電子技術,2005,28(18):116?117.
[7] 歐全梅.基于ARM核嵌入式微處理器的以太網應用[J].現代電子技術,2006,29(15):34?36.
