FlexRay總線的飛行控制計算機設計
2015-08-15 06:28:21劉彧曹東呂迅竑
單片機與嵌入式系統應用 2015年4期
劉彧,曹東,呂迅竑
(南京航空航天大學自動化學院,南京210016)
FlexRay總線的飛行控制計算機設計
劉彧,曹東,呂迅竑
(南京航空航天大學自動化學院,南京210016)
針對傳統飛行控制計算機不易升級、擴展困難等不足,本文引入了FlexRay總線技術,采用模塊化的設計思想,將飛行控制計算機內部各模塊通過FlexRay總線連接,提供多機通信的總線接口,完成了飛行控制計算機的硬件設計以及FlexRay總線協議設計,其性能、體積、功耗、成本均能滿足當前工程需求。
飛行控制計算機;FlexRay總線;MPC5644A;總線協議
引言
飛行控制計算機是飛行器的“大腦”,隨著飛行任務不斷復雜化、多樣化,對飛行控制計算機的要求也不斷提高。傳統集成式的飛行控制計算機將CPU、傳感器、外圍接口等集成在一塊或多塊電路板上,這種設計使得飛行控制計算機的結構更加緊湊,但同時也降低了擴展性,使得日后更新升級變得困難。本文將FlexRay總線引入到傳統飛行控制計算機結構之中,各模塊之間只需通過兩根內部總線相連,在保證系統結構緊湊的同時,增大了系統應用的靈活度,使得維護性、拓展性大大增強。
1 總體設計方案
典型的飛行控制計算機按功能可劃分為CPU模塊和傳感器模塊。為了提高系統集成度,本文將無線測控模塊也集成在飛行控制計算機之中。CPU模塊是主控單元,主要負責控制律解算、導航以及任務調度等工作。傳感器模塊負責向CPU模塊提供載機的姿態、位置等信息。測控模塊是飛行控制計算機與地面站通信的橋梁,地面控制人員通過遙測傳回的信息了解無人機的飛行狀態,同時通過發送遙控指令實現對無人機的控制。
通過對國內外小型無人機飛行控制計算機研制現狀的調查并結合現階段的工程需求,本文對飛行控制計算機提出了以下設計指標:主頻不低于100 MHz,尺寸小于100 mm×60 mm×50 mm,重量小于400 g,功耗低于15 W,集成慣性傳感器、高度傳感器、空速傳感器以及GPS,集成串口、開關量I/O、模擬量I/O等。
為了提高飛行控制計算機的擴展性以及可維護性,本系統采用模塊化的設計思想。將主控CPU與外圍接口設計在一塊核心板上,傳感器模塊與測控模塊設計在另一塊傳感器板上。傳感器板上的采樣CPU將傳感器信息、遙控信息解幀、重新組幀后通過FlexRay總線發送至主控CPU,同時接收主控CPU下傳的遙測信息并通過測控模塊發送至地面站。系統的整體結構示意圖如圖1所示。
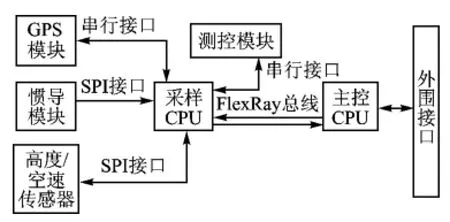
圖1 飛行控制計算機結構示意圖
2 系統硬件組成
飛行控制計算機由核心板、傳感器板、底板3塊電路板組成:核心板上主要有主控CPU、外部存儲器、PWM驅動電路、開關量驅動電路、A/D轉換電路、串口驅動電路、總線驅動電路等;傳感器板上主要有采樣CPU、慣性傳感器、高度/空速傳感器、GPS、數傳電臺、串口驅動電路、總線驅動電路等;底板主要有連接核心板與傳感器板的插座以及飛行控制計算機的外部接口。
為了保證飛行控制計算機具有高速的運算性能以及豐富的接口,主控CPU選用飛思卡爾公司的MPC5644A微控制器,其主要性能如下:最高150 MHz的工作頻率;4 MB內部Flash;192 KB片上SRAM;內置FlexRay、CAN控制器;最高可擴展16路串口、32路PWM I/O[1]。
慣導選用ADI公司十自由度慣性傳感器,可輸出三軸角速度、三軸加速度、三軸姿態角、磁航向等信息,使用SPI接口與CPU通信。高度/空速傳感器使用精量電子的數字式氣壓傳感器,使用SPI接口與CPU通信。GPS選用NOVATEL公司的OEM板進行二次開發。測控模塊設計了轉接板可供多種型號的數傳電臺使用。
FlexRay控制器使用MPC5644A內置的FlexRay模塊,驅動器選用Philips公司TJA1080芯片。FlexRay模塊正常工作需要40 MHz的工作頻率,可從系統總線時鐘或者外部參考時鐘獲取。本文由于采用40 MHz外部有源時鐘,故選取外部時鐘作為參考源。MPC5644A與TJA1080連接示意圖如圖2所示。
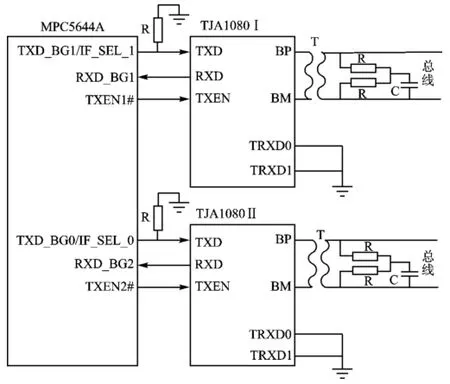
圖2 MPC5644A與TJA1080連接示意圖
3 FlexRay協議設計
3.1 總線數據流分析
飛行控制計算機內部FlexRay總線上的數據流總體由兩部分組成:傳感器板發送至核心板的上行數據以及核心板發送至傳感器板的下行數據。上行數據又可細分為:GPS數據、慣性傳感器數據、高度/空速傳感器數據以及遙控數據。下行數據同樣可分為以下幾部分:控制律輸出、航段航點信息、控制律參數、A/D采樣數據。本文以數據更新率的最小公倍數200 ms為周期,對飛行控制計算機FlexRay總線數據流進行分析。上行數據中傳感器數據以及遙控數據更新率統計如表1所列。
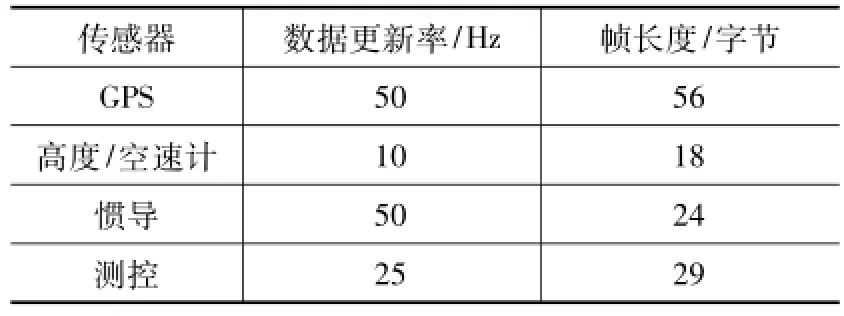
表1 上行數據更新率
可計算出在 100 ms內的數據流量為 981字節。200 ms內FlexRay總線上,上行數據總流量還包括每幀的幀頭(5字節)和幀尾(3字節)。由于FlexRay發送周期為5 ms,靜態段分為60個時隙,使用其中4個時隙分別發送GPS數據、高度/空速計數據、慣性傳感器數據以及測控數據。故在200 ms中,上行數據的總流量為981+(5+3)× 4×40=2 261字節。
下行數據按現有飛行控制計算機遙測協議,將數據分為5個遙測幀,每一幀的數據量及更新率如表2所列。
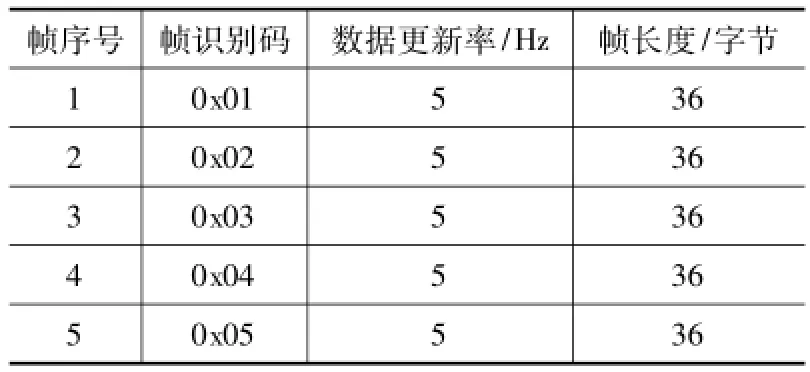
表2 下行數據更新率
200 ms內的數據流量36×5=180字節,將幀頭與幀尾計算在內,下行數據的總流量為180+5×40=380字節。
FlexRay的通信速率為10 Mb/s,即在200 ms內可以提供250 000字節的傳輸能力,遠大于飛行控制計算機的數據流量需求,故FlexRay總線的帶寬是滿足設計要求的。
3.2 通信實時性分析
飛行控制計算機對實時性的要求較為嚴格,因此對數據總線通信的實時性提出了更高的要求。FlexRay在總線訪問方式上,提供了時間觸發和事件觸發兩種傳輸方式[2]。靜態段采用時分多址(TDMA)技術,將發送周期分成若干個相等的時隙,不同時隙發送的數據幀占據其對應的存儲地址。在動態段采用柔性時分多址(FTDMA)技術,當沒有數據發送時,發送周期為間隔相等的動態段最小時隙,當有數據發送時,發送周期被分成若干個長度不等的時隙。本文對靜態段與動態段的發送延遲時間分別進行了分析。
FlexRay消息幀由幀頭、有效數據和幀尾3部分組成,FlexRay消息幀格式如圖3所示。幀頭部分共由5個字節組成,包括保留位、有效數據指示位、空幀指示位、同步幀指示位、啟動幀指示位、幀ID、有效數據長度、頭部循環校驗CRC和周期計數。有效數據部分可由0~254個字節組成。幀尾部分只含有單個的數據域,即一個24位的CRC[3]。
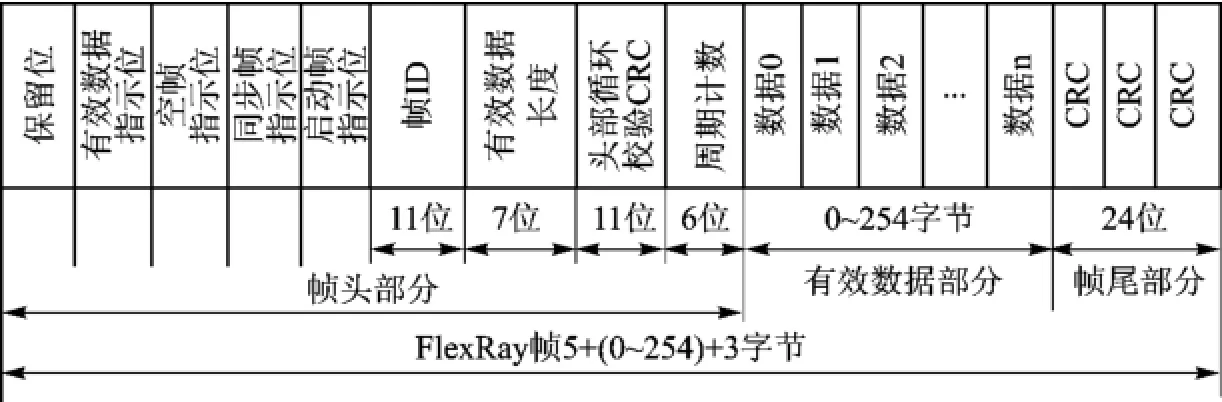
圖3 FlexRay消息幀格式
靜態段傳輸方式是基于時間觸發的,需要發送的數據幀被安排在每個周期中約定好的時隙定時發送,故靜態段數據幀的發送時間是確定的。因此,靜態段數據幀從占據數據總線到被指定節點接收的延遲只與數據幀的長度有關,可得其計算公式為[4]:
Td=TSS+FSS+Header+PayloadDATA(8+BSS)+ FES+Tailer
=TSS+FSS+510+Pl×10+FES+310
=TSS+FSS+FES+Pl×10+80
其中,TSS為傳輸開始序列,通常取7位;FSS為幀開始序列,通常取1位;FES為幀結尾序列,通常取2位。在數據幀的每個字節前面都添加了2位的字節開始序列BSS,所以每個字節實際上占了10位。在10 Mb/s的傳輸速率下,每位的傳輸時間為0.1 μs。當有效數據為滿負載發送時,延時時間大約為263 μs。由于控制律的解算周期為10 ms,遠大于FlexRay靜態段延遲時間,故FlexRay靜態段數據幀的發送接收是滿足飛行控制計算機實時性要求的。
動態段的傳輸方式是基于事件觸發的,時隙是動態分配的。當動態段空閑時,每個節點都會按照時隙號從小到大的順序判斷當前時隙號和待發的幀ID號是否相同;若相同則發送該幀,發送完畢后時隙號加1;若不相同,則等待一個最小時隙后時隙號加1。由此可見,在動態段時隙的個數與長度跟發送的數據幀數量與長度是密切相關的。
由于在動態段數據幀的發送時間是不確定的,故在計算動態段數據幀發送延遲時,需考慮4個方面的影響:相同ID號且優先級高的幀搶占發送,會使當前幀延遲一個發送周期發送;動態段同周期中幀ID號較小的幀優先發送會產生延遲;當前幀發送前動態段空閑的最小時隙也會產生延遲;當前幀自身傳輸的時間。
在飛行控制計算機中非定時發送的數據可以在動態段進行發送,在設計通信協議的時候需要注意盡量不要存在ID號相同的幀,以減少同ID號幀之間優先級搶占帶來的發送延遲。
3.3 發送時隙安排
在飛行控制計算機中上行、下行數據都是按固定時間定時發送的,故在設計FlexRay通信協議時可暫時只使用靜態段進行發送。
由于FlexRay總線上靜態段的數據都是安排在固定的時隙發送,故只要設計的時隙滿足最長的一幀數據發送,總線上就不會出現數據流過載和擁堵的狀況。根據3.1節對上、下行數據流的統計,數據量最大的一幀為GPS數據,共占用56字節,因此,在本系統中靜態段的數據負載設計為64字節。當傳輸速率為10 Mb/s時,考慮到位流信號(如TSS、FSS、BSS、FES段)及閑置時間,傳輸時間約為72 μs[5]。故取靜態時隙大小為100 μs,每個時隙可以傳輸一幀數據,靜態時隙個數為30個,每個通信周期只用到前11個靜態時隙,其余19個時隙做備用;動態段占用了22個微時隙;符號窗口設為14 μs;網絡閑置時間長度為整個發送周期減去靜態段和符號窗口后剩下的長度,用來進行相位校正和頻率校正。具體的節點通信時隙安排如表3所列。
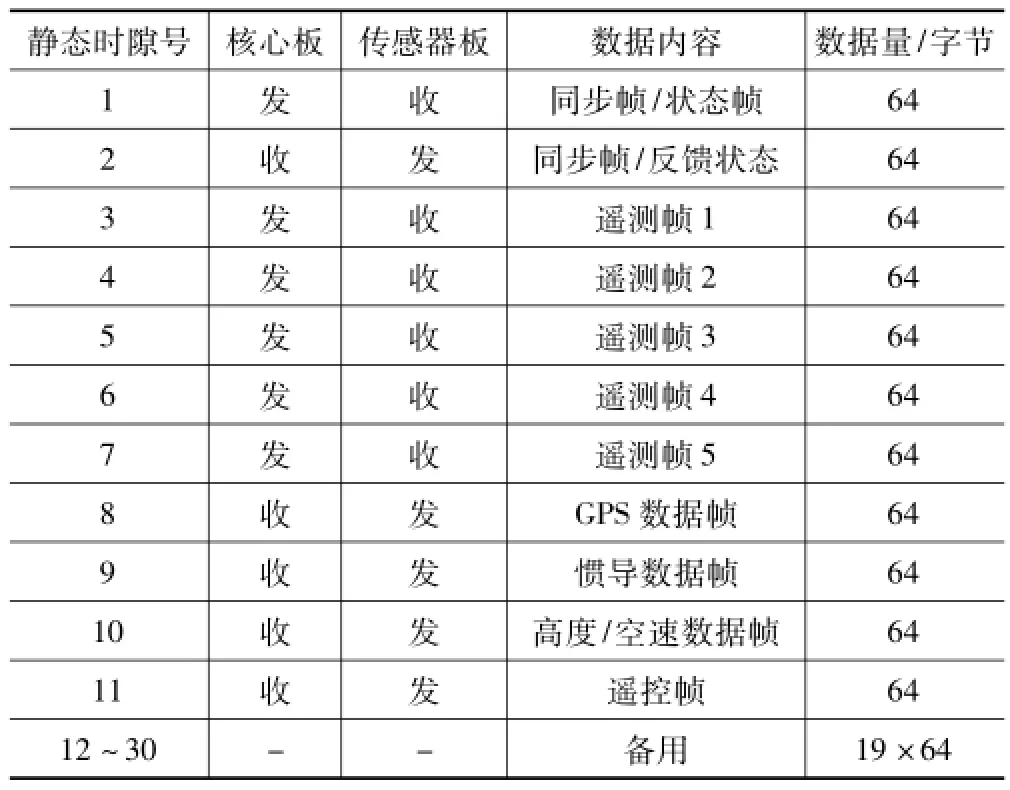
表3 通信節點時隙安排
核心板在時隙1向傳感器板發送狀態檢測幀,傳感器板在時隙2向核心板發送返回狀態幀。當總線上節點增加時,核心板會向每個節點發送狀態檢測幀,其余每個節點在接收后都會在固定的時隙向核心板發送返回狀態幀,以保證該通信周期開始時總線上的所有節點都處于正常工作狀態。
4 測試驗證
最后對設計的FlexRay總線節點進行通信測試驗證。把該網絡節點設為冷啟動節點,系統上電初始化后,經過FlexRay總線配置、準備、冷啟動偵聽等相關協議狀態,該節點會向總線發出10個啟動幀來啟動FlexRay集群,至此,單個節點的FlexRay總線準備完畢。把該系統節點與已經實現的基于C8051F120的FlexRay總線節點連接起來進行FlexRay集群通信測試。在該集群系統內,基于C8051F120的 FlexRay總線節點和基于 MPC5644A的FlexRay總線節點均設為最簡單的兩個時隙通信模式,即一個時隙收、一個時隙發,系統僅用靜態段發送數據。系統參數:通信周期大小設為5 ms,靜態段大小設為50 μs,其他系統參數(如動態段、負載段的長度,通信速率等)兩個節點均設置為一樣,每個節點都對接收到的數據幀數、丟幀數和發生錯誤幀數進行計數。MPC5644A節點通過串口將通信結果輸出到PC機上以供觀測,同時也可以通過示波器直接觀測總線波形進行監控。FlexRay集群通信總線上的波形如圖4所示。
經過12小時連續通信測試(6小時常溫和6小時-45℃的低溫),低溫6小時通信結果如表4所列。從表中可以看出,丟幀數和錯誤計數都為0,表明節點設計正確,滿足內部總線對誤碼率的指標要求,同時也驗證了FlexRay總線在不同溫度環境下高速率通信的可靠性和安全性。
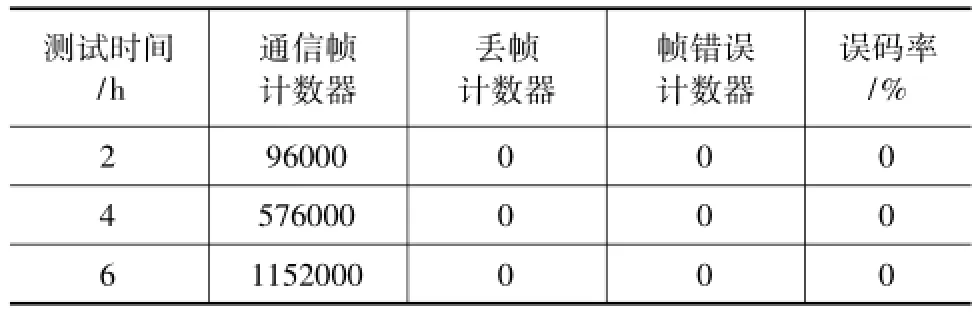
表4 測試結果
圖4 FlexRay集群通信總線波形圖
結語
本文介紹了一種基于FlexRay總線結構的飛行控制計算機的設計,該系統采用了模塊化設計的思想,便于調試和維護且具有較強的可擴展性。當選用性能更優的傳感器時,只需對傳感器模塊進行改動。同時,FlexRay總線的高帶寬特性為多余度飛行控制計算機的實現提供了便利條件。
[1]Freescale Semiconductor.MPC5644A Reference Manual.Rev. 6,2012.
[2]徐志俊.FlexRay總線在工業自動化領域的應用展望[J].工業控制計算機,2008,21(5).
[3]張利.基于總線占用率的FlexRay消息時隙分配方法研究[J].中國機械工程,2012,23(6).
[4]莊江麗.FlexRay網絡通信時滯性分析[J].機械與電子,2012(9).
[5]章勇.基于FlexRay飛行控制計算機總線技術設計與研究[D].南京:南京航空航天大學,2012.
劉彧(碩士研究生),主要研究方向為先進飛行控制。
Flight Control Computer Based on FlexRay Bus
Liu Yu,Cao Dong,Lü Xunhong
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
Aiming at the difficulties of extension and upgrading in the classic flight control computer,the paper introducs the FlexRay bus technology.The flight control computer is divided into several modules which connect each other using FlexRay bus,and it can provide a bus interface of multi machine communication.The article completes the flight control computer hardware design and the FlexRay bus protocol design.Its performance,volume,power consumption and cost all meet current engineering demand.
flight control computer;FlexRay bus;MPC5644A;bus protocol
TN919;TP399
A
薛士然
2014-10-14)
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
現代裝飾(2020年7期)2020-07-27 01:27:42
趣味(數學)(2020年9期)2020-06-09 05:35:08
流行色(2020年1期)2020-04-28 11:16:38
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2017年20期)2018-01-03 06:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
