雷達(dá)目標(biāo)角度跟蹤環(huán)路濾波器設(shè)計(jì)新方法
2015-08-17 11:15:54蔣兵兵盛衛(wèi)星張仁李韓玉兵
電子與信息學(xué)報(bào) 2015年12期
蔣兵兵 盛衛(wèi)星張仁李 韓玉兵
(南京理工大學(xué)電子工程與光電技術(shù)學(xué)院 南京 210094)
雷達(dá)目標(biāo)角度跟蹤環(huán)路濾波器設(shè)計(jì)新方法
蔣兵兵 盛衛(wèi)星*張仁李 韓玉兵
(南京理工大學(xué)電子工程與光電技術(shù)學(xué)院 南京 210094)
角度跟蹤環(huán)路在機(jī)載雷達(dá)對(duì)目標(biāo)的距離、速度、角度3維聯(lián)合跟蹤中起著至關(guān)重要的作用。該文分析指出傳統(tǒng)采用卡爾曼濾波算法形成角度跟蹤環(huán)路對(duì)機(jī)動(dòng)目標(biāo)角度進(jìn)行跟蹤時(shí)跟蹤精度低,角跟蹤誤差收斂速度慢的缺點(diǎn),提出彎曲度檢測跟蹤環(huán)路濾波器(Bend Degree Tracking Loop Filter, BDTLF)設(shè)計(jì)方法,其利用彎曲度檢測角度曲線拐點(diǎn),自適應(yīng)地調(diào)節(jié)環(huán)路濾波器環(huán)路等效噪聲帶寬,并以此來控制角度跟蹤環(huán)路。此算法加快了角跟蹤誤差的收斂速度,減輕了拐點(diǎn)處的角度濾波擾動(dòng),保持了濾波性能的連續(xù)性。計(jì)算機(jī)仿真結(jié)果驗(yàn)證了該文方法相比于卡爾曼濾波算法、粒子濾波算法、 α - β -γ濾波算法及恒定系數(shù)環(huán)路濾波器方法,對(duì)弱機(jī)動(dòng)目標(biāo)角度跟蹤具有更加出色的性能。
角度跟蹤;弱機(jī)動(dòng)目標(biāo);環(huán)路濾波器;拐點(diǎn)檢測
1 引言
機(jī)載雷達(dá)對(duì)機(jī)動(dòng)目標(biāo)的跟蹤[1-12],包括單目標(biāo)跟蹤(Single Target Tracking, STT)與多目標(biāo)跟蹤(Multiple Target Tracking, MTT),一直是比較重要的課題,也是當(dāng)今研究目標(biāo)跟蹤工作進(jìn)展的難點(diǎn)。對(duì)于線性系統(tǒng),目前最常用的目標(biāo)跟蹤算法包括最小二乘濾波(least square filtering),卡爾曼濾波(Kalman filtering)以及交互式多模型(interacting multiple model),其中應(yīng)用最多的就是卡爾曼濾波。自從1961年,Kalman提出卡爾曼濾波算法后,針對(duì)目標(biāo)跟蹤,學(xué)者們提出了適用于諸如白噪聲加速度模型(Constant Velocity, CV), Wiener加速度模型(Constant Acceleration, CA)、一階時(shí)間相關(guān)模型(singer)和“當(dāng)前”統(tǒng)計(jì)模型(Current Statistical, CS)等目標(biāo)運(yùn)動(dòng)模型的基于卡爾曼濾波的距離、速度、角度跟蹤算法。
就目標(biāo)角度跟蹤算法及角度跟蹤環(huán)路建模而言,任波等人[1]為了提高目標(biāo)跟蹤的準(zhǔn)確性和可靠性,采用純角度跟蹤模型和非線性預(yù)測濾波算法相結(jié)合的方法來確定跟蹤目標(biāo)的實(shí)際位置。Al-Emadi等人[2]提出了一種利用同步信號(hào)參考與振蕩信號(hào)的角度跟蹤技術(shù)的測量轉(zhuǎn)換器,可以很簡單地在基本模擬電子電路中實(shí)現(xiàn),而且表現(xiàn)出優(yōu)異的跟蹤性能。趙嚴(yán)冰等人[3]從單脈沖雷達(dá)導(dǎo)引頭半實(shí)物仿真出發(fā),對(duì)包括測角單元與天線伺服單元的角度跟蹤環(huán)路建模,在噪聲干擾、欺騙干擾的場景下,進(jìn)行了仿真實(shí)驗(yàn),并重點(diǎn)介紹了此仿真工程實(shí)現(xiàn)的關(guān)鍵技術(shù)。孫迎豐等人[4]通過計(jì)算目標(biāo)幾何中心,提出了基于目標(biāo)幾何中心的角信息處理方法,不僅有效抑制角閃爍,而且具有更好的跟蹤準(zhǔn)確性和穩(wěn)定性。朱瑩等人[5]利用狀態(tài)空間法仿真了噪聲干擾環(huán)境下雷達(dá)角度跟蹤時(shí)滯伺服系統(tǒng),并對(duì)其效能進(jìn)行了評(píng)估。郭寧等人[6]考慮到目標(biāo)機(jī)動(dòng)性特點(diǎn),設(shè)計(jì)了基于“當(dāng)前”機(jī)動(dòng)模型的自適應(yīng)橢球?yàn)V波算法,改善了光電跟蹤系統(tǒng)的角度跟蹤性能。倪震明等人[7]在對(duì)防空導(dǎo)彈導(dǎo)引頭的建模仿真中,利用和差比幅測角與卡爾曼濾波(Kalman filtering)結(jié)合得到角度跟蹤模型,并通過仿真驗(yàn)證了有效性。Hou等人[8]利用位置已知的傳感器陣列,提出了一種基于擴(kuò)展卡爾曼濾波以及粒子濾波的角度跟蹤算法,利用每個(gè)時(shí)間步長中的單個(gè)快拍計(jì)算得到角度值。Zhang等人[9]利用融合的紅外與雷達(dá)傳感器測量數(shù)據(jù),提出了用粒子濾波(particle filtering)算法對(duì)當(dāng)前狀態(tài)的后驗(yàn)均值進(jìn)行估計(jì)的角度跟蹤算法。Blanding等人[10]研究了對(duì)電子對(duì)抗中進(jìn)入干擾區(qū)或其他遮擋區(qū)的目標(biāo)進(jìn)行角度跟蹤的問題,他們用修正的角度測量協(xié)方差聯(lián)合測量似然函數(shù)得到了更加準(zhǔn)確的協(xié)方差矩陣測量方法,并在多個(gè)仿真算例的角度跟蹤中驗(yàn)證了其優(yōu)異的性能。Seifer[11]研究了純?cè)肼暬蛟肼暭痈蓴_的環(huán)境中單脈沖雷達(dá)的角度跟蹤性能。
角度跟蹤環(huán)路的任務(wù)是精確地確定目標(biāo)相對(duì)于所選坐標(biāo)系的位置(角度)、目標(biāo)的角度變化率并保持天線波束對(duì)準(zhǔn)目標(biāo),它是決定距離、速度、角度3維聯(lián)合跟蹤環(huán)路性能以及能否持續(xù)跟蹤目標(biāo)的關(guān)鍵,所以提高機(jī)載雷達(dá)角度跟蹤環(huán)路的性能十分有意義。
我們知道,卡爾曼濾波跟蹤算法的狀態(tài)方程是對(duì)目標(biāo)運(yùn)動(dòng)狀態(tài)的建模,其狀態(tài)轉(zhuǎn)移矩陣是決定能否精確跟蹤目標(biāo)的關(guān)鍵。一般情況下,由于無法預(yù)知目標(biāo)的運(yùn)動(dòng)模型,采用卡爾曼濾波跟蹤算法的機(jī)載數(shù)字陣列雷達(dá)在跟蹤初始階段,無法快速達(dá)到收斂狀態(tài),而且跟蹤精度有限,有時(shí)甚至?xí)霈F(xiàn)濾波發(fā)散情況,徐景碩等人[13]提出了強(qiáng)跟蹤濾波算法來避免這樣的情況。另一方面,進(jìn)入到目標(biāo)跟蹤末段,即機(jī)載雷達(dá)與目標(biāo)接近時(shí),從數(shù)字陣列雷達(dá)上看到的目標(biāo)角度位置變化加快,基于傳統(tǒng)卡爾曼濾波的角度跟蹤算法跟蹤精度大大降低,甚至無法完成對(duì)目標(biāo)的跟蹤。
若數(shù)字陣列雷達(dá)在搜索到目標(biāo)并在轉(zhuǎn)入對(duì)目標(biāo)跟蹤階段時(shí),能夠快速建立角度跟蹤環(huán)路,并且在當(dāng)前相參處理間隔(Coherent Processing Interval,CPI)的信號(hào)處理結(jié)束后,除了完成對(duì)回波信號(hào)中角度信息的測量,又精確地預(yù)估到下個(gè)CPI所接收目標(biāo)回波中攜帶的俯仰角、方位角信息,以此來調(diào)整天線波束指向,接收下個(gè)CPI的目標(biāo)回波并進(jìn)行后續(xù)的信號(hào)處理,那么從整個(gè)目標(biāo)跟蹤階段來看,這樣的角度跟蹤環(huán)路能在很短的時(shí)間內(nèi)達(dá)到收斂狀態(tài),實(shí)現(xiàn)對(duì)目標(biāo)角度的精確跟蹤。
本文采用數(shù)字陣列雷達(dá)中成熟的單脈沖測角技術(shù)[14]聯(lián)合高精度測量與信號(hào)檢測中常用的環(huán)路濾波器[15]設(shè)計(jì)角度跟蹤環(huán)路。與采用卡爾曼濾波的角度跟蹤環(huán)路相比,此方法的角度跟蹤誤差收斂速度更快,均方根誤差也更小,但當(dāng)目標(biāo)弱機(jī)動(dòng),出現(xiàn)運(yùn)動(dòng)方向拐彎,即從雷達(dá)上看到目標(biāo)角度曲線上出現(xiàn)拐點(diǎn)時(shí),上述方法會(huì)在拐點(diǎn)發(fā)生段出現(xiàn)濾波擾動(dòng),破壞了濾波連續(xù)性。
由于拐點(diǎn)處的環(huán)路等效噪聲帶寬與目標(biāo)穩(wěn)定運(yùn)動(dòng)時(shí)的帶寬不同,對(duì)機(jī)動(dòng)目標(biāo)角度跟蹤的算法必須要對(duì)拐點(diǎn)段作調(diào)整。在弱機(jī)動(dòng)目標(biāo)的拐點(diǎn)發(fā)生段內(nèi),其角度位置的變化范圍小,變化速率低,調(diào)小環(huán)路濾波器的環(huán)路等效噪聲帶寬,平穩(wěn)地渡過拐點(diǎn)段,可以降低跟蹤濾波性能擾動(dòng)。故本文提出基于彎曲度檢測的跟蹤環(huán)路濾波器 (Bend Degree Tracking Loop Filter, BDTLF)設(shè)計(jì)方法,此方法在上述角度跟蹤環(huán)路中增加對(duì)目標(biāo)機(jī)動(dòng)段角度曲線拐點(diǎn)的檢測,一旦檢測到拐點(diǎn),則調(diào)小環(huán)路濾波器的環(huán)路等效噪聲帶寬,控制跟蹤精度,若干個(gè)CPI后,對(duì)穩(wěn)定運(yùn)動(dòng)的目標(biāo)使用之前的環(huán)路等效噪聲帶寬,保持角度跟蹤環(huán)路濾波連續(xù)性,具體框圖如圖1所示。
2 信號(hào)模型
數(shù)字陣列雷達(dá)的前端為相控陣,陣元數(shù)目為960,分為16個(gè)子陣,具體分布情況如圖2所示。圖3為機(jī)載雷達(dá)目標(biāo)相對(duì)運(yùn)動(dòng)的示意圖。
2.1 陣元級(jí)的發(fā)射信號(hào)與回波信號(hào)模型
陣元級(jí)發(fā)射脈沖多普勒信號(hào)模型如式(1)所示。

陣元級(jí)回波信號(hào)模型如式(2)所示。
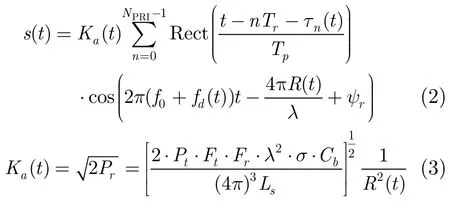
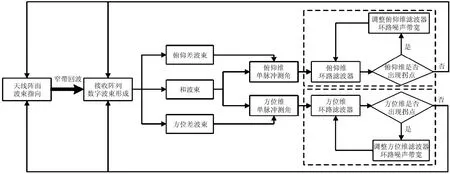
圖1 基于拐點(diǎn)檢測的角度跟蹤環(huán)路
圖2 子陣分布情況
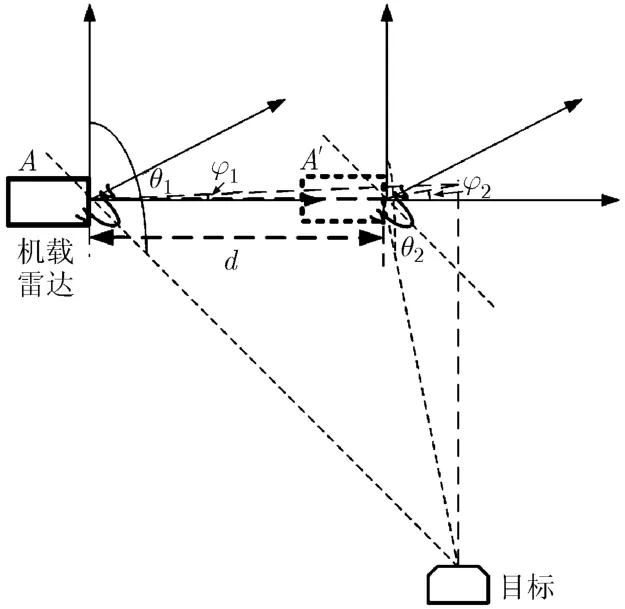
圖3 機(jī)載雷達(dá)與目標(biāo)運(yùn)動(dòng)示意圖
Ft為發(fā)射方向圖沿兩者連線方向的增益, Fr為接收增益;σ為目標(biāo)RCS值; Cb為大氣衰減因子;為損失因子;λ為雷達(dá)工作波長;為脈沖發(fā)射初始時(shí)刻的斜距, v( t)為相對(duì)徑向速度);為徑向多普勒頻率;為每個(gè)采樣時(shí)刻對(duì)應(yīng)的斜距。2.2 接收機(jī)噪聲信號(hào)模型
噪聲信號(hào)為帶限高斯白噪聲,假定其在每個(gè)陣元后端的接收機(jī)處引入,噪聲帶寬與接收機(jī)帶寬相等。用高斯白噪聲通過帶限濾波器,來模擬子陣級(jí)的噪聲信號(hào)。
2.3 子陣接收信號(hào)模型
子陣接收的信號(hào)由子陣內(nèi)所有陣元接收信號(hào)組成,而陣元級(jí)的接收信號(hào)包含陣元回波信號(hào)與接收機(jī)噪聲兩個(gè)部分,設(shè)總陣元個(gè)數(shù)為N,第p個(gè)陣元的坐標(biāo)為θ為俯仰角,φ為方位角,則當(dāng)前波束指向下的陣列流形向量如式(4)所示。

相比于滿陣條件下的接收信號(hào)模型,子陣接收信號(hào)模型中多一個(gè)子陣轉(zhuǎn)換矩陣 Ts,如式(5)所示。

其中T為子陣形成矩陣,其構(gòu)造方式為:設(shè)共有K個(gè)子陣,則T為一個(gè)N × K的矩陣,其每列對(duì)應(yīng)一個(gè)子陣,若某個(gè)陣元在此子陣內(nèi),則對(duì)應(yīng)元素置1,否則置0。故子陣接收信號(hào)為

3 基于彎曲度檢測的跟蹤環(huán)路濾波器設(shè)計(jì)
調(diào)節(jié)環(huán)路濾波器的等效噪聲帶寬可以控制環(huán)路跟蹤精度及收斂快慢。在弱機(jī)動(dòng)目標(biāo)發(fā)生運(yùn)動(dòng)轉(zhuǎn)向時(shí)段內(nèi)的角度變化特性與目標(biāo)穩(wěn)定運(yùn)動(dòng)時(shí)的角度變化特性有區(qū)別,故其等效環(huán)路噪聲帶寬與目標(biāo)穩(wěn)定運(yùn)動(dòng)時(shí)是不同的。對(duì)于采用單脈沖測角技術(shù)和環(huán)路濾波器建立角度跟蹤環(huán)路的機(jī)載數(shù)字陣列雷達(dá),若其能在陣面視角方向的目標(biāo)開始出現(xiàn)機(jī)動(dòng)時(shí)檢測到目標(biāo)運(yùn)動(dòng)發(fā)生轉(zhuǎn)向,并同時(shí)改變環(huán)路濾波器的等效噪聲帶寬,控制跟蹤精度,至若干個(gè)CPI后目標(biāo)運(yùn)動(dòng)穩(wěn)定,重新使用之前的環(huán)路噪聲帶寬,這樣就可以避免由于未對(duì)目標(biāo)運(yùn)動(dòng)特性考慮而帶來的濾波擾動(dòng),減小整個(gè)跟蹤周期內(nèi)角度誤差的波動(dòng),得到更好的角度跟蹤環(huán)路性能。對(duì)于弱機(jī)動(dòng)目標(biāo)的拐點(diǎn)發(fā)生段,可以通過調(diào)小環(huán)路濾波器的環(huán)路噪聲帶寬來平穩(wěn)渡過。
圖像處理中常采用彎曲度來判斷出現(xiàn)拐點(diǎn)的像素位置[16]。通過類比的思想,本文提出了基于彎曲度檢測跟蹤環(huán)路濾波器設(shè)計(jì)算法(BDTLF):計(jì)算角度變化曲線上每個(gè)點(diǎn)對(duì)應(yīng)的彎曲度,并檢測變化曲線中是否出現(xiàn)拐點(diǎn),調(diào)整拐點(diǎn)處的等效環(huán)路噪聲帶寬,提高角度跟蹤環(huán)路性能。下面是BDTLF算法的具體說明。
算法步驟:
步驟1 取點(diǎn)。設(shè)取點(diǎn)的鄰域半徑為r,記本次角度值為 θn(n > 2r,n ∈ N+),按鄰域半徑往前取前兩個(gè)角度值為 θn-r, θn-2r,由此得到要處理的 3個(gè)坐標(biāo),橫坐標(biāo)為角度值對(duì)應(yīng)的CPI號(hào),縱坐標(biāo)為角度值,如式(7)所示。

步驟 3 計(jì)算這3個(gè)坐標(biāo)對(duì)應(yīng)的彎曲度,其值如式(9)所示[16]。


步驟 5 在后續(xù)的 NT個(gè) CPI中使用拐點(diǎn)位置對(duì)應(yīng)的環(huán)路等效噪聲帶寬進(jìn)行角度跟蹤;
步驟 6 NT個(gè)CPI后,使用目標(biāo)穩(wěn)定運(yùn)動(dòng)時(shí)對(duì)應(yīng)的環(huán)路等效噪聲帶寬進(jìn)行角度跟蹤。
對(duì)于環(huán)路等效噪聲帶寬的選取,按照工程經(jīng)驗(yàn),應(yīng)滿足 BL≤ 0.1Rb,其中,BL為環(huán)路等效噪聲帶寬,Rb為送入環(huán)路濾波器待濾波信號(hào)的數(shù)據(jù)率。目標(biāo)穩(wěn)定運(yùn)動(dòng)時(shí)的環(huán)路等效噪聲帶寬按照此規(guī)則來確定,記為 BLm,取為 Rb的2% ~ 6%,拐點(diǎn)位置用小的環(huán)路等效噪聲帶寬來控制濾波精度,記為 BLc,取為BLm的0.4 ~ 0.6倍。
圖4,圖5所示為鄰域半徑 r= 2時(shí),一些典型的曲線(加噪的半圓周、三角波和正弦波)以及真實(shí)俯仰角與方位角變化軌跡的拐點(diǎn)檢測結(jié)果。檢測結(jié)果中雖然出現(xiàn)了對(duì)少許非拐點(diǎn)位置的誤判,但虛假拐點(diǎn)都靠近真實(shí)拐點(diǎn),驗(yàn)證了基于彎曲度拐點(diǎn)檢測算法的檢測性能。
4 計(jì)算機(jī)仿真
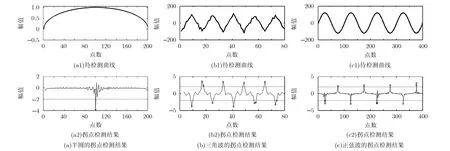
圖4 不同加噪曲線的拐點(diǎn)檢測結(jié)果
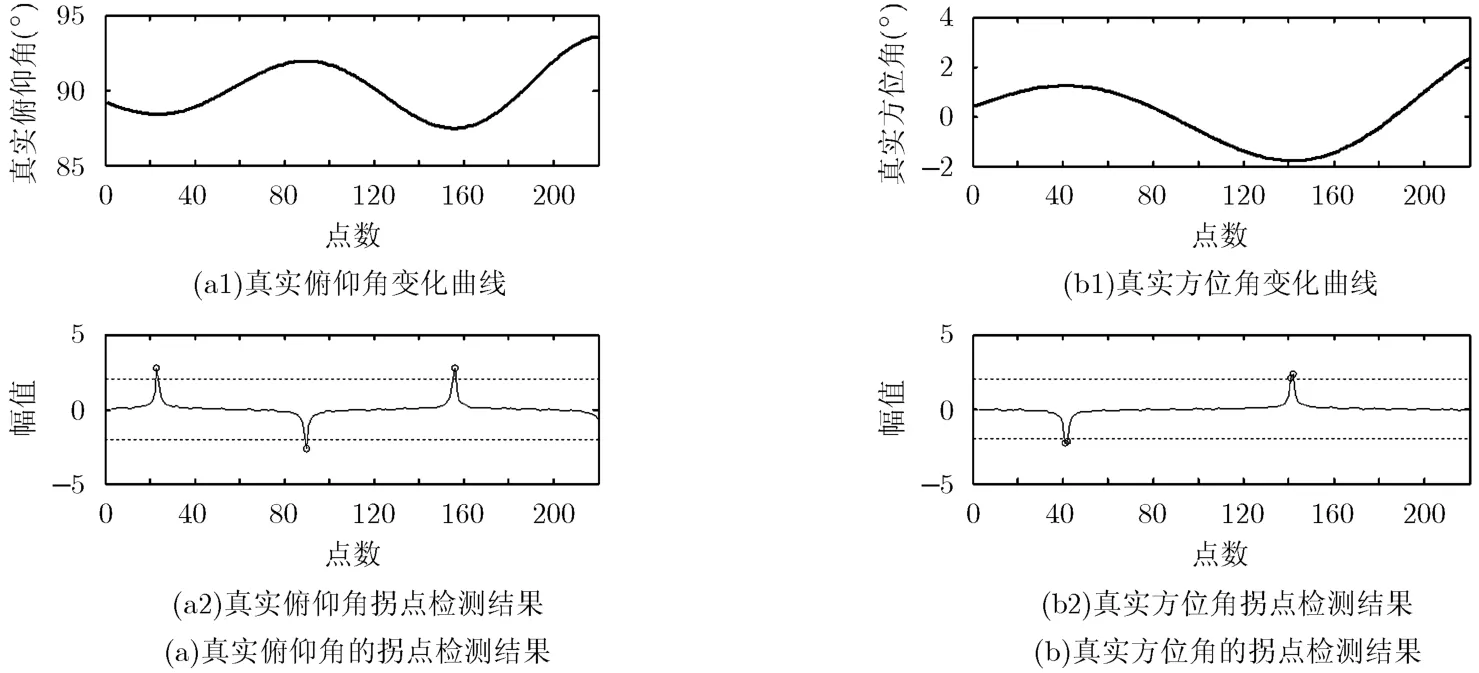
圖5 仿真場景中角度變化曲線的拐點(diǎn)檢測結(jié)果
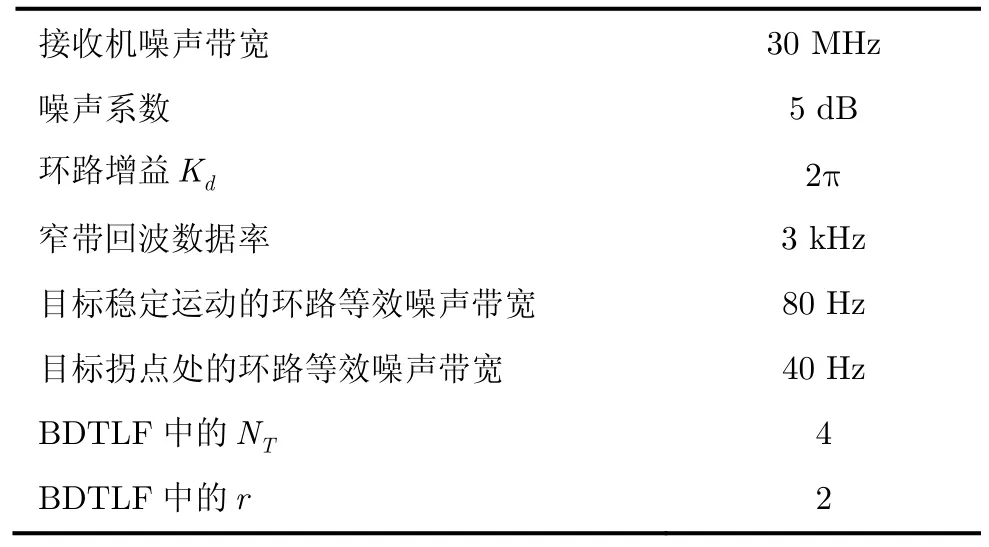
表1 仿真參數(shù)
在本文的角度跟蹤環(huán)路中,系統(tǒng)對(duì)各路子陣回波信號(hào)進(jìn)行下變頻,數(shù)模轉(zhuǎn)換,濾波以及抽取等處理后,得到窄帶數(shù)據(jù)。再對(duì)窄帶信號(hào)作數(shù)字波束形成(Digital Beam Forming, DBF)處理,形成和波束、俯仰維差波束、方位維差波束,接著用這3個(gè)波束作和差比幅單脈沖測角。得到測角誤差電平后,將其按快拍依次送入環(huán)路濾波器,并將環(huán)路濾波器對(duì)最后一個(gè)快拍的輸出作為本個(gè)CPI的角度跟蹤環(huán)路輸出值,以此來控制下個(gè)CPI天線陣面的波束指向以及DBF所需的期望信號(hào)角度,實(shí)現(xiàn)閉環(huán)。
文獻(xiàn)[7]中使用的角度跟蹤環(huán)路與該文類似,它利用速度波門內(nèi)一段回波信號(hào)得到速度門內(nèi)的和通道信號(hào)、差通道信號(hào),之后將兩者的實(shí)部取出求和,確定角誤差信號(hào),這一步驟類似和差比幅測角。在得到角誤差信號(hào)后,利用基于Singer模型的機(jī)動(dòng)目標(biāo)卡爾曼濾波跟蹤算法對(duì)角度進(jìn)行跟蹤。文獻(xiàn)[9]中利用粒子濾波算法實(shí)現(xiàn)對(duì)機(jī)動(dòng)目標(biāo)的角度跟蹤,此方法可以推廣應(yīng)用到本文的機(jī)載數(shù)字陣列雷達(dá)平臺(tái)。另外,考慮到 α - β -γ濾波算法在雷達(dá)角度跟蹤環(huán)路中的應(yīng)用也很多,也將其推廣到本文的平臺(tái)中。
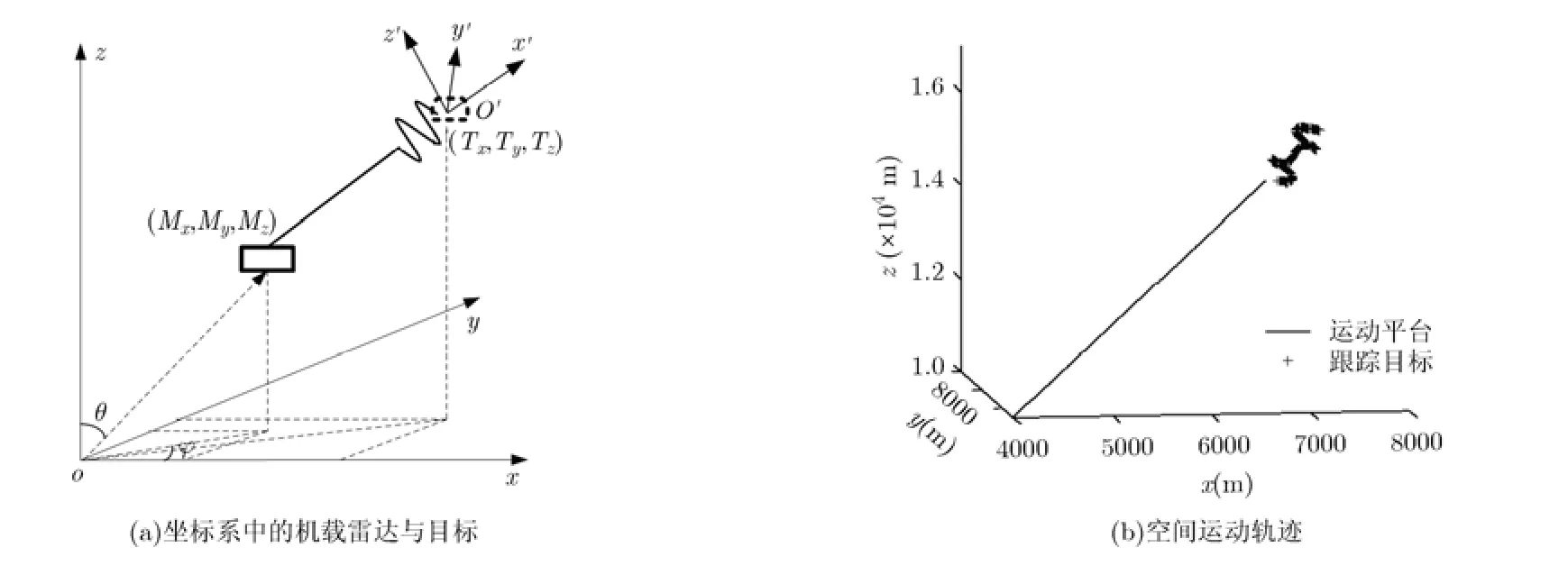
圖6 計(jì)算機(jī)仿真場景示意圖
定義第k個(gè)CPI角度濾波值與第k+1個(gè)CPI角度真實(shí)值的差值為第k個(gè)CPI的角度跟蹤誤差,即

圖7給出了本文設(shè)計(jì)的角度跟蹤環(huán)路BDTLF算法,文獻(xiàn)[7]中采用卡爾曼濾波角度跟蹤環(huán)路,文獻(xiàn)[9]中的粒子濾波算法及常用的 α - β -γ濾波算法應(yīng)用到本文雷達(dá)平臺(tái)上的性能對(duì)比。
文獻(xiàn)[7]中基于Singer模型的卡爾曼濾波算法仿真參數(shù)為:文獻(xiàn)[9]中粒子濾波算法中使用的粒子數(shù)為量測噪聲協(xié)方差矩陣狀態(tài)噪聲協(xié)方差矩陣-γ濾波算法中從圖 7可以看出,在角度跟蹤初始階段,5種方法都有較好的跟蹤精度。隨著跟蹤狀態(tài)的進(jìn)行,其它3種方法由于其狀態(tài)轉(zhuǎn)移矩陣與目標(biāo)真實(shí)運(yùn)動(dòng)軌跡模型之間的偏差變大,濾波效果也隨之變差;然而,采用恒定LF(Loop Filter)系數(shù)的角度跟蹤環(huán)路在角度跟蹤過程中,跟蹤誤差穩(wěn)步減小,并逐漸達(dá)到收斂的狀態(tài),雖然在部分位置出現(xiàn)濾波偏差突變的情況,但仍能夠收斂。另一方面, BDTLF能更快地進(jìn)入收斂狀態(tài),而且精度也相對(duì)較高。在方位角跟蹤曲線中,第142個(gè)CPI出現(xiàn)拐點(diǎn),恒定LF系數(shù)作用下的角度跟蹤環(huán)路的濾波性能出現(xiàn)擾動(dòng),而 BDTLF則表現(xiàn)出較好的跟蹤連續(xù)性以及穩(wěn)定性。
表2為5中方法分別在俯仰維、方位維的角度跟蹤均方根誤差對(duì)比情況。對(duì)于弱機(jī)動(dòng)目標(biāo)的角度跟蹤,使用環(huán)路濾波的跟蹤環(huán)路的跟蹤性能要優(yōu)于采用卡爾曼濾波的角度跟蹤環(huán)路,其不僅能夠保證濾波誤差的收斂,而且跟蹤均方根誤差也更小。恒定 LF系數(shù)角度跟蹤環(huán)路的跟蹤均方根誤差為卡爾曼濾波的13%左右,角度跟蹤性能顯著提高。本文提出的基于彎曲度檢測的跟蹤環(huán)路設(shè)計(jì)算法BDTLF相比于恒定LF系數(shù)作用下的角度跟蹤環(huán)路性能更好。其次,運(yùn)用BDTLF算法,使得跟蹤誤差收斂更快,并且跟蹤均方根誤差減小為使用恒定LF系數(shù)的40%左右,為卡爾曼濾波算法的5%左右,較好地提升了跟蹤環(huán)路的性能。
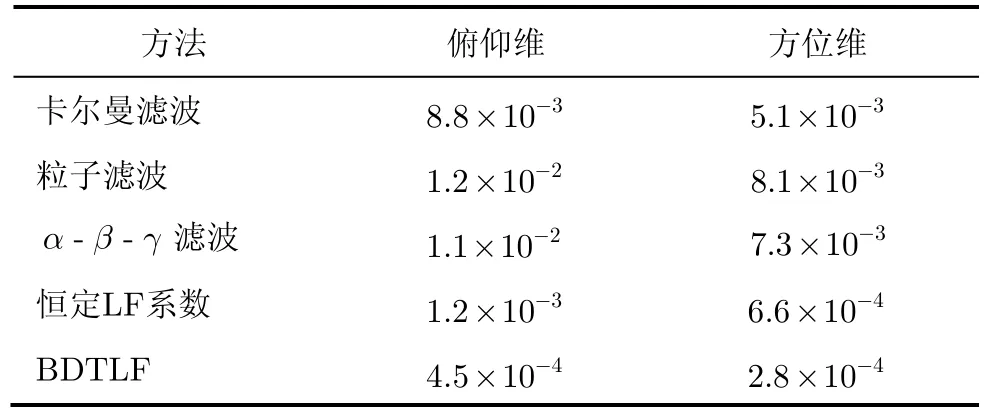
表2 5種方法在兩個(gè)維度角度跟蹤均方根誤差比較(rad)
圖8給出BDTLF算法的拐點(diǎn)檢測性能。可以看出,BDTLF算法能夠檢測出真實(shí)的拐點(diǎn),但也會(huì)發(fā)生誤判,但錯(cuò)誤概率在能接受的范圍內(nèi)。另一方面,在BDTLF發(fā)生檢測錯(cuò)誤時(shí),得到虛假拐點(diǎn)的位置靠近真實(shí)拐點(diǎn),對(duì)角度跟蹤性能的破壞較小,可以論證BDTLF具有較好的拐點(diǎn)檢測性能,而且從其得到的角度跟蹤誤差性能上能夠看出:BDTLF適用于機(jī)載雷達(dá)對(duì)弱機(jī)動(dòng)目標(biāo)的角度跟蹤。
最后,再討論關(guān)于BDTLF中拐點(diǎn)位置對(duì)應(yīng)的等效環(huán)路噪聲帶寬使用CPI數(shù)的確定問題。圖9為BDTLF中在不同的鄰域半徑以及不同的拐點(diǎn)位置對(duì)應(yīng)的等效環(huán)路噪聲帶寬作用CPI數(shù)條件下得到的角度跟蹤環(huán)路的濾波標(biāo)準(zhǔn)差,顏色深的方塊對(duì)應(yīng)的標(biāo)準(zhǔn)差小。可以看出,當(dāng)鄰域半徑為 r= 2,拐點(diǎn)位置對(duì)應(yīng)的環(huán)路濾波系數(shù)作用的CPI數(shù)為3~6時(shí),俯仰角與方位角的角度跟蹤均方根誤差都比較小,本
作為典型值仿真。
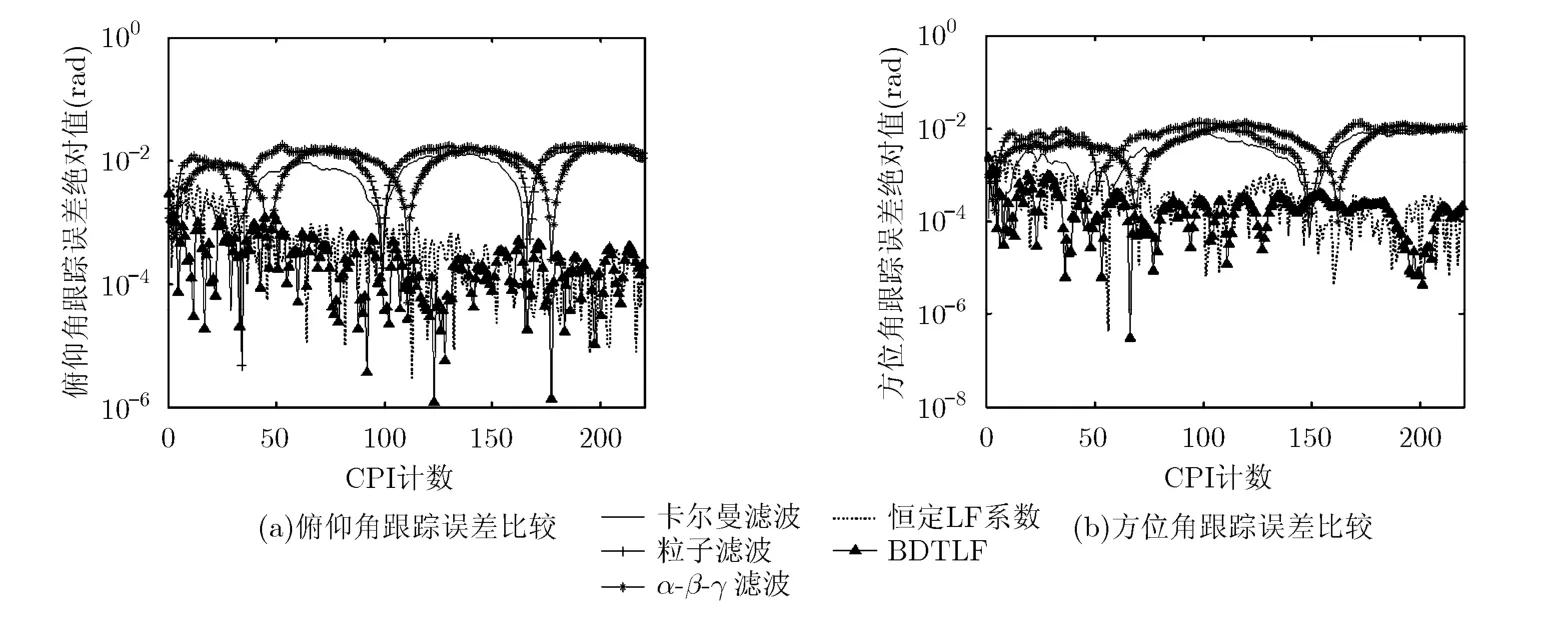
圖7 角度跟蹤環(huán)路性能比較
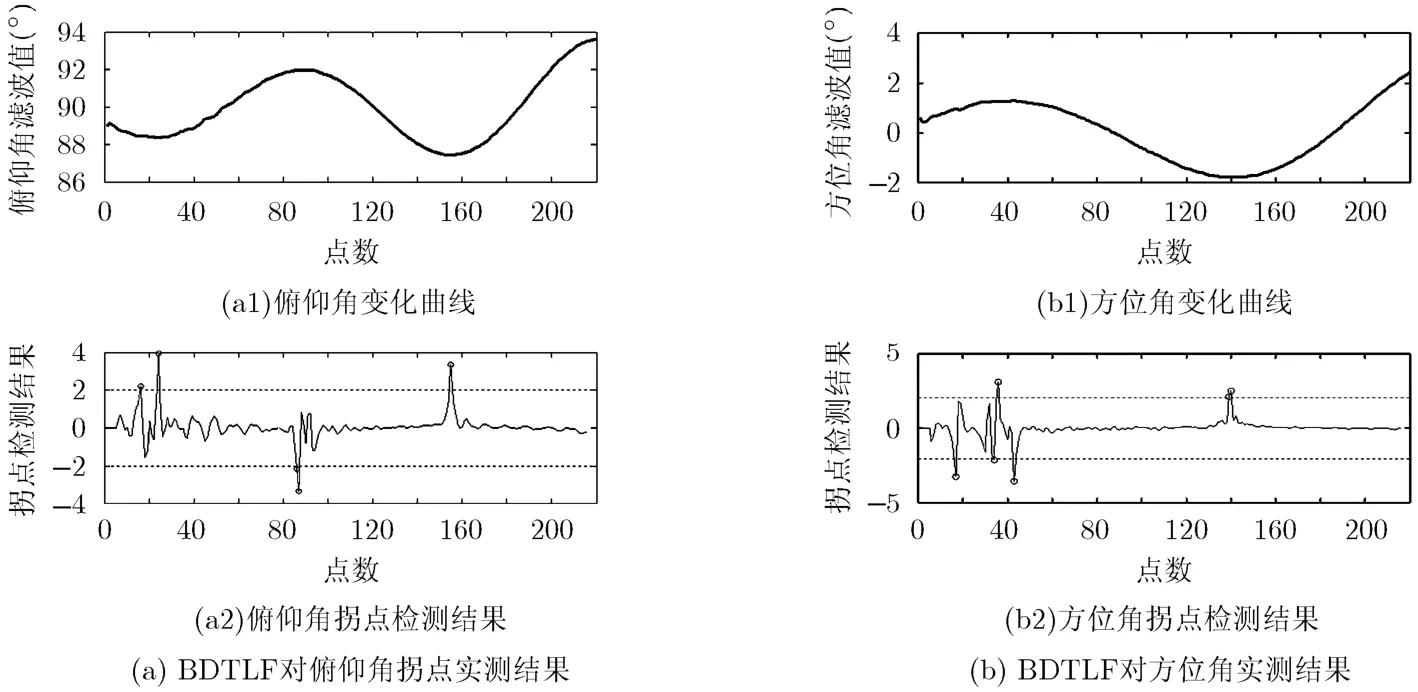
圖8 BDTLF對(duì)俯仰角、方位角的拐點(diǎn)實(shí)測結(jié)果
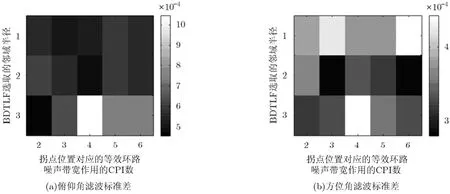
圖9 BDTLF對(duì)俯仰角、方位角的濾波標(biāo)準(zhǔn)差
5 結(jié)束語
本文提出了一種新的機(jī)載數(shù)字陣列雷達(dá)對(duì)弱機(jī)動(dòng)目標(biāo)的角度跟蹤算法:基于彎曲度檢測的跟蹤環(huán)路濾波器(BDTLF)設(shè)計(jì),可以對(duì)目標(biāo)角度變化曲線上的拐點(diǎn)進(jìn)行檢測,自適應(yīng)地調(diào)節(jié)環(huán)路濾波器的環(huán)路噪聲帶寬,加快了角度跟蹤環(huán)路的收斂速度,并且抑制了目標(biāo)角度在拐點(diǎn)處發(fā)生濾波擾動(dòng),保持了濾波性能的連續(xù)性與穩(wěn)定性。計(jì)算機(jī)仿真結(jié)果驗(yàn)證了BDTLF算法對(duì)雷達(dá)目標(biāo)角度變化曲線拐點(diǎn)檢測性能。通過與其它算法對(duì)比,在機(jī)載數(shù)字陣列雷達(dá)平臺(tái)上對(duì)弱機(jī)動(dòng)目標(biāo)角度跟蹤時(shí),BDTLF算法得到的角誤差收斂性能更加出色。
[1] 任波, 閆向遠(yuǎn). 純角度跟蹤非線性預(yù)測濾波算法研究[J]. 彈箭
與制導(dǎo)學(xué)報(bào), 2014, 34(2): 6-8.Ren Bo and Yan Xiang-yuan. Bearing-only tracking nonlinearprediction filter algorithm research[J]. Journal of Projectiles,Rockets, Missiles and Guidance, 2014, 34(2): 6-8.
[2] Al-Emadi N, Ben-Brahim L, and Benammar M. A new tracking technique for mechanical angle measurement[J]. Measurement, 2014, 54(8): 58-64.
[3] 趙嚴(yán)冰, 陳正寧. 單脈沖雷達(dá)導(dǎo)引頭角度跟蹤環(huán)路半實(shí)物仿真[J]. 現(xiàn)代防御技術(shù), 2014, 42(6): 146-152. Zhao Yan-bing and Chen Zheng-ning. Hardware-in-loop simulation of angle tracking loop for monopulse radar seeker[J]. Modern Defense Technology, 2014, 42(6): 146-152.
[4] 孫迎豐, 劉旭東, 張磊, 等. 基于目標(biāo)幾何中心的高分辨雷達(dá)角跟蹤方法[J]. 中國電子科學(xué)研究院學(xué)報(bào), 2014, 18(2): 194-198. Sun Ying-feng, Liu Xu-dong, Zhang Lei, et al.. Angular tracking method based on the geometric center of target in high resolution radar[J]. Journal of CAEIT, 2014, 18(2): 194-198.
[5] 朱瑩, 王金廣, 高其娜, 等. 噪聲干擾下雷達(dá)角度跟蹤時(shí)滯伺服系統(tǒng)仿真[J]. 系統(tǒng)仿真學(xué)報(bào), 2014, 26(8): 1814-1819. Zhu Ying, Wang Jin-guang, Gao Qi-na, et al.. Noise jam on angle tracking radar delay servo system simulation[J].Journal of System Simulation, 2014, 26(8): 1814-1819.
[6] 郭寧, 呂俊偉, 鄧江生. 光電跟蹤系統(tǒng)純角度濾波器的設(shè)計(jì)[J].光學(xué)精密工程, 2013, 21(7): 1818-1824. Guo Ning, Lü Jun-wei, and Deng Jiang-sheng. Design of filter only by angle information in opto-electronic tracking system[J]. Optics and Precision Engineering, 2013, 21(7): 1818-1824.
[7] 倪震明, 陳長海, 劉俊. 防空導(dǎo)彈導(dǎo)引頭建模與仿真[J]. 現(xiàn)代電子技術(shù), 2012, 35(17): 25-29. Ni Zhen-ming, Chen Chang-hai, and Liu Jun. Modeling and simulation of air-defense missile seeker[J]. Modern Electronics Technique, 2012, 35(17): 25-29.
[8] Hou S Y, Hung H S, and Kao T S. Extended Kalman particle filter angle tracking (EKPF-AT) algorithm for tracking multiple targets[C]. 2010 IEEE International Conference on System Science and Engineering (ICSSE), Taipei, 2010: 216-220.
[9] Zhang G, Liang J, Zhao H, et al.. Sequential Monte Carlo implementation for infrared/radar maneuvering target tracking[C]. The WCICA 2006 IEEE Sixth World Congress on Intelligent Control and Automation, Dalian, 2006: 5066-5069.
[10] Blanding W R, Koch W, and Nickel U. Adaptive phasedarray tracking in ECM using negative information[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009,45(1): 152-166.
[11] Seifer A D. Monopulse-radar angle tracking in noise or noise jamming[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(3): 622-638.
[12] Sword C K, Simaan M, and Kamen E W. Multiple target angle tracking using sensor array outputs[J]. IEEE Transactions on Aerospace and Electronic Systems, 1990,26(2): 367-373.
[13] 徐景碩, 秦永元, 顧冬晴. 控制 Kalman 濾波器發(fā)散的方法研究[J]. 彈箭與制導(dǎo)學(xué)報(bào), 2004, 24(1): 249-252. Xu Jing-shuo, Qin Yong-yuan, and Gu Dong-qing. Research on schemes for restraining Kalman filter divergence[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2004,24(1): 249-252.
[14] 劉宏偉, 張守宏. 平面陣線性約束自適應(yīng)單脈沖測角算法[J].電子與信息學(xué)報(bào), 2001, 23(3): 275-279. Liu Hong-wei and Zhang Shou-hong. Linearly constrained adaptive monopulse estimation algorithm for planar array[J]. Journal of Electronics & Information Technology, 2001, 23(3): 275-279.
[15] Chung B, Chien C, Samueli H, et al.. Performance analysis of an all-digital BPSK direct-sequence spread-spectrum IF receiver architecture[J]. IEEE Journal on Selected Areas in Communications, 1993, 11(7): 1096-1107.
[16] 廖文志, 皮佑國. 基于雙重彎曲度積的圖像拐點(diǎn)檢測術(shù)[J]. 華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版), 2010, 38(2): 132-136. Liao Wen-zhi and Pi You-guo. Corner detection of image based on product of two bending degrees[J]. Journal of South China University of Technology (Natural Science Edition),2010, 38(2): 132-136.
蔣兵兵: 男,1990年生,博士生,研究方向?yàn)槔走_(dá)信號(hào)處理,目標(biāo)跟蹤技術(shù).
盛衛(wèi)星: 男,1966年生,教授,博士生導(dǎo)師,主要研究方向?yàn)閿?shù)字波束形成、智能天線、電磁散射模型以及圖像處理.
張仁李: 男,1986年生,講師,碩士生導(dǎo)師,主要研究方向?yàn)槔走_(dá)信號(hào)處理、恒虛警檢測、雜波檢測與雜波抑制.
韓玉兵: 男,1971年生,副教授,博士生導(dǎo)師,主要研究方向?yàn)殛嚵行盘?hào)處理、視頻圖像處理.
A Novel Design Method of Radar Target Angle Tracking Loop Filter
Jiang Bing-bing Sheng Wei-xing Zhang Ren-li Han Yu-bing
(School of Electronic and Optical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
The angle tracking loop in airborne radar facing to a maneuvering target plays a vital role in the joint 3D-tracking of range, velocity and angle. This paper analyses the disadvantage of the conventional Kalman filter algorithm employed to track a maneuvering target’s angle, which are a low tracking precision and a slow convergence rate of angle tracking error. In order to solve these problems, a novel angle tracking algorithm called Bend Degree Tracking Loop Filter (BDTLF) is put forward to detect the corners in target’s angle curve by bend degree detection and adjust the loop noise bandwidth adaptively to control angle tracking loop. The proposed algorithm accelerates the convergence rate in angle tracking loop, lightens the filtering disturbance around target’s angle curve corners, and keeps the continuity of filtering performance. The computer simulation results demonstrate that compared with the angle tracking loop using Kalman filtering algorithm, particle filtering algorithm, α - β -γ filtering algorithm or a constant coefficient loop filter, this novel method has a more satisfying performance in angle tracking of weakly maneuvering targets.
Angle tracking; Weakly maneuvering target; Loop filter; Corner detection
The National Natural Science Foundation of China (61401207)
TN953.5
A
1009-5896(2015)12-2948-08
10.11999/JEIT150389
2015-04-02;改回日期:2015-07-08;網(wǎng)絡(luò)出版:2015-08-27
*通信作者:盛衛(wèi)星 shengwx@njust.edu.cn
國家自然科學(xué)基金(61401207)
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
