基于路徑規劃的智能環境監控系統
2015-08-29 11:11:26張義群程樹英福州大學微納器件與太陽能電池研究所福建福州350108
網絡安全與數據管理 2015年5期
張義群,程樹英(福州大學 微納器件與太陽能電池研究所,福建 福州 350108)
基于路徑規劃的智能環境監控系統
張義群,程樹英
(福州大學微納器件與太陽能電池研究所,福建福州 350108)
基于S3C2440嵌入式處理器的自主移動智能小車系統能在安卓客戶端發送目的地位置信息后,完成路徑規劃并自動避障。處理器將小車上搭載的功能傳感器所采集到的實時數據信息反饋到客戶端,實現對室內質量狀況(實時視頻監控、溫度、濕度和煙霧指數)的動態環境監測,并于定點位置安裝功能傳感器,采用 ZigBee無線模塊實現定點的環境數據采集與運動系統交互,進而反饋到客戶端。而當運動系統電量不足時,在自動充電單元控制下自動完成充電過程。測試結果表明,該運動系統能夠穩定運行,具有良好的實時性。
S3C2440;嵌入式;自主移動;路徑規劃;自動充電;環境監測
0 引言
目前市場上的環境監控攝像頭大多采用定點安裝,通過攝像頭的轉動來采集室內環境的實時情況,其不足在于不僅存在監視死角,且需要多個定點安裝[1];而對于室內的溫度、濕度和煙霧環境質量狀況的監測則是通過定點安裝傳感器來采集實時數據,從而反映出環境質量的實時狀況。因此,該方案需要定點安裝數量不少的攝像頭和傳感器,極大地浪費了人力物力[2]。雖然國內外已有采用基于路徑規劃算法[3](大多采用的是蟻群算法、遺傳算法和人工神經網絡算法)的機器人來無線監控室內環境以及監測環境數據信息,然而這些算法具有一定的復雜性,并且與起點位置和障礙分布有關,可能造成路徑迂回。
本設計基于導航組件,對使用智能小車作為載體的運動系統進行路徑規劃;采用超聲波測距模塊自動避障;當智能小車電量不足時,可在自動充電單元的控制下自動完成充電過程。從而實現室內環境的自主移動監控和溫度、濕度、煙霧指數的數據采集。
1 系統總體結構
圖1為本設計的系統結構框圖。系統以 S3C2440嵌入式處理器作為控制中心,采用安裝有導航組件、電機驅動模塊和特定功能傳感器的智能小車作為運動數據采集系統;通過 ZigBee組網通信,將運動系統采集到的視頻數據和傳感數據以及固定節點采集到的傳感數據匯總到運動系統的嵌入式服務端,用戶可以使用安卓客戶端,通過WiFi來無線實時操控和監測室內環境狀況;而運動系統電量不足時,在自動充電單元控制下,小車自動完成充電過程。
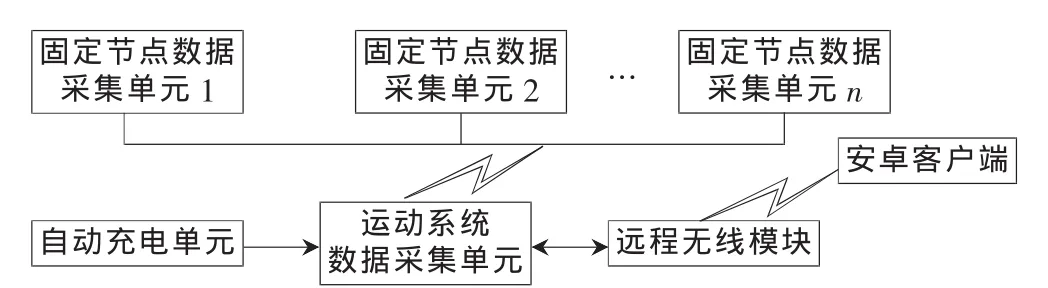
圖1 系統結構框圖
2 運動系統設計
2.1智能小車路徑規劃
路徑規劃算法是在導航組件的基礎上進行設計,該導航組件由 GPS模塊數字羅盤和霍爾傳感器組成[4-5]。
如圖2所示,假定作為運動系統載體的智能小車位于一平面上,將其起始位置用平面坐標XY上的S點標記,圖中箭頭方向即為小車的車頭方向,E點為安卓客戶端所輸入的目標終點。
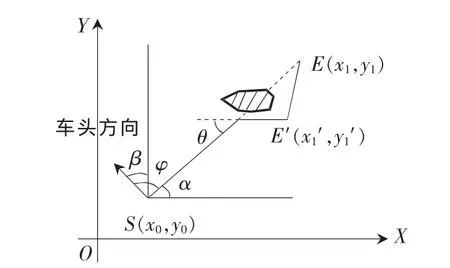
圖2 路徑算法模型
在XY平面上連接起點S和終點E,直線SE與x軸方向(假定x軸方向地理位置為正東方向)之間的夾角為α:
α=tan-1((y1-y0)/(x1-x0))=tan-1(Δy/Δx)
式中,Δx=x1-x0;Δy=y1-y0;(x0,y0)為小車當前點 S的坐標;(x1,y1)為安卓客戶端所輸入的目標終點E的坐標。
在不考慮障礙物的情況下,形成一條理想化的直線路徑,即小車從當前位置 S(x0,y0)直線運動到目標位置E(x1,y1)。GPS模塊數字羅盤能夠測出智能小車的車頭起始位置與正北方向(y軸方向)之間的夾角為β,則車頭方向與SE直線間的夾角φ=β+(90°-α)。通過嵌入式處理器測算,調整車頭方向,使小車正對S■→E方向朝目標點E駛去。而在小車行走過程中,采用霍爾傳感器記錄小車行走的路徑。小車在行走的過程中可能會遇到各種各樣的障礙物,因此必須檢測并順利躲避障礙物,使得小車可以安全準確到達預設目標點。如圖3所示,箭頭所指方向為小車車頭方向,在小車的右前方、正前方、左前方、右后方、左后方安裝5個超聲波測距避障模塊。
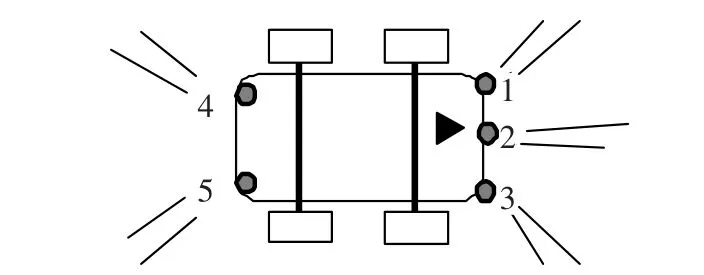
圖3 超聲波模塊布置
若相應方向的超聲波模塊測距后檢測到障礙物(圖2中不規則陰影部分為障礙物),則嵌入式處理器給小車下達執行避障的命令。當小車處于前進狀態,且前方的3個超聲波模塊均檢測不到障礙物時,則認為已避開障礙物[6]。這時,處理器重新讀取小車當前的 GPS坐標E′(x1′,y1′),以當前即時位置 E′的坐標更新原始位置 S的坐標,便得到更新后的x、y值;而后再設置理想化直線E′E,重新規劃導航路徑。如此反復,直到x、y的值小于預設的閾值后,則認為在誤差范圍內,小車已到達目標終點 E(x1,y1);然后通過嵌入式控制中心給客戶端一個反饋,從而客戶端可以監測該位置的視頻信息、溫度、濕度和煙霧指數值以及報警模塊反饋的安全狀態(客戶端顯示的信息同時也包含了用戶關心的固定節點采集到的數據信息)。
智能小車在從 S(x0,y0)向 E(x1,y1)行進的過程中,遵循以下原則:
(1)在外部環境條件允許的情況下,運動軌跡僅是理想化路徑的近似曲線。
(2)當外界存在障礙物時,小車先進行避障任務,避開障礙物或遠離障礙物后(即圖2中 E′點),再讀取即時GPS坐標,重新規劃導航路徑。
2.2智能小車自動充電設計
在充電電源處放有強光,而小車上安裝有趨光模塊(由5個光敏電阻組成的趨光電路),模塊的光敏電阻阻值隨光強而變化。為了減小外界無關的光線影響,在每個光敏電阻上,套上用黑膠帶做成的桶行冒[7],其目的是可較準確地檢測出各個方向的光強,方便處理器的控制,減小檢測誤差。通過對光敏電阻檢測到的光強轉換電壓與預設的閾值比較,完成小車追蹤光源的任務。
每個光敏電阻檢測一特定扇形區域,如圖4所示,該區域角度為α。經過測試,α在32°左右即可。在尋光過程中,當光敏電阻追蹤到光時,其阻值發生變化,處理器檢測變化信號并產生相應的指令來驅動電機,從而改變小車的行進路線。當小車路線改變后,相應地光敏電阻接受到的光強也隨之發生變化;在電源處放著一塊強力磁鐵,而小車上放有一塊金屬片,當小車通過尋光行駛到電源處,停止前進,在電源處的磁鐵實現電源與小車的對接功能,從而實現自動充電;而處理器一旦監測到小車電池電壓達到電量充滿的閾值時,驅動電機使小車與磁鐵脫離吸合狀態。因此,該運動系統在室內環境的動態監測過程中不用考慮電量不足的問題,能更好地實現人性化的環境監測。
2.3智能小車避障策略
智能小車在行進過程中遇到障礙物時所采取的策略如表1所示。當超聲波模塊檢測到障礙物時,相應模塊的電平為“1”,否則為“0”;“X”為任意狀態;D1和D3分別為1號和3號測距模塊所測障礙物距離。

圖4 追蹤光源原理圖
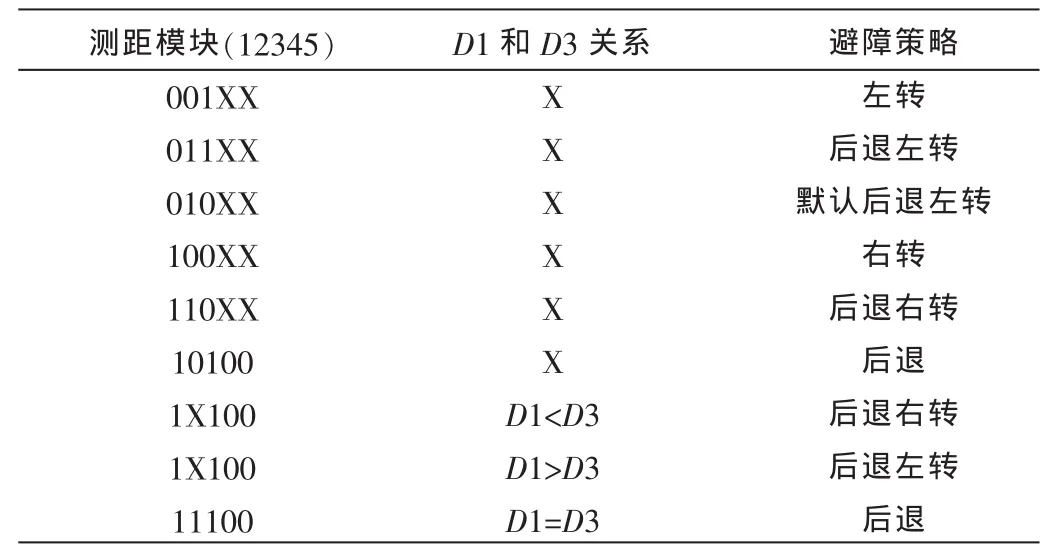
表1 智能小車避障策略
3 實現結果
在空曠的操場上自動規劃智能小車行走路徑。圖5為小車的實測行走路徑,小車從S點出發,先后經過預設目標點E1、E2、E3;在行進過程中,小車遇到了障礙物,需進行自動避障,因此整條路徑行成了S型,而非理想的直線路徑,S到E3之間的直線距離為25 m。
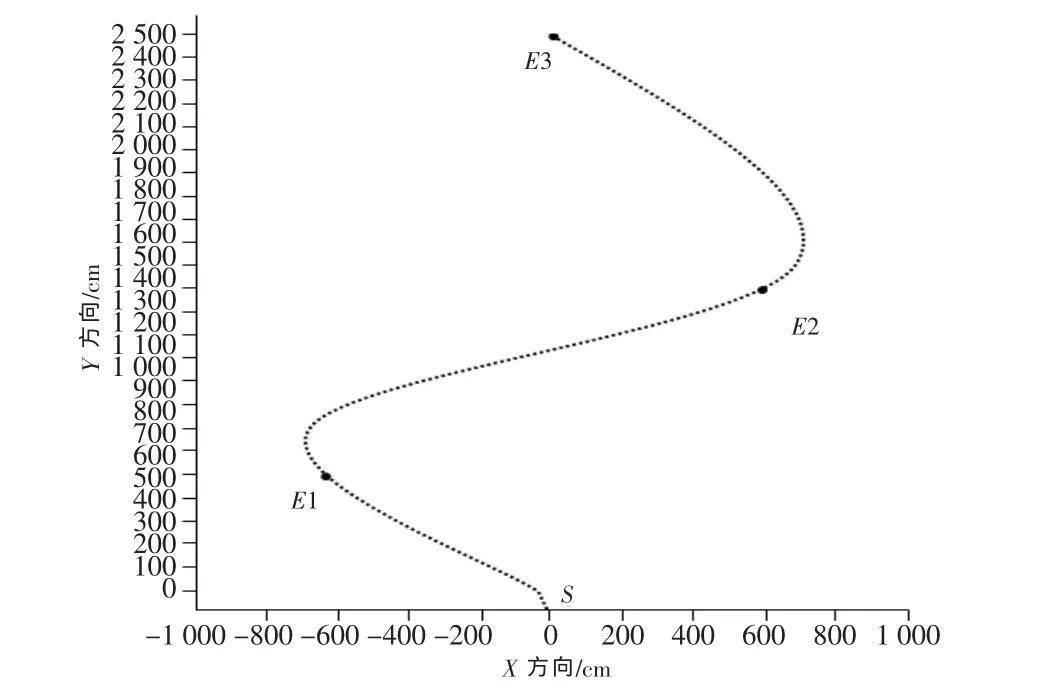
圖5 智能小車的實測S型軌跡
小車從起始點出發的行進過程中,通過GPS模塊數字羅盤能夠測出智能小車的車頭起始位置與正北方向之間的夾角為β,因此在不同的時間內,車頭方向與小車當前位置到目標點直線間的夾角φ=β+(90°-α)可通過處理器測出。由此可獲得智能小車方向角φ與時間的關系圖,如圖6所示。小車在出發點S處與目標點E1,開始存在一個方向角,設置好目標點E1后,小車迅速調整車頭位置,使車頭正對目標點,并前進;在行進過程中,由于沒有遇到障礙物,方向角在0°左右波動,在誤差允許的范圍內;當小車行走到目標點E1時,隨即獲取到前往目標點E2的命令,在E1位置存在障礙物,因此方向角變化需要一定的時間。當車頭方向調整到正對目標點 E2時,方向角在 0°左右波動,在誤差允許的范圍內。從圖中也可以看出,從E2到E3也滿足設計的需求。小車在28 s內,自主移動,成功到達終點。
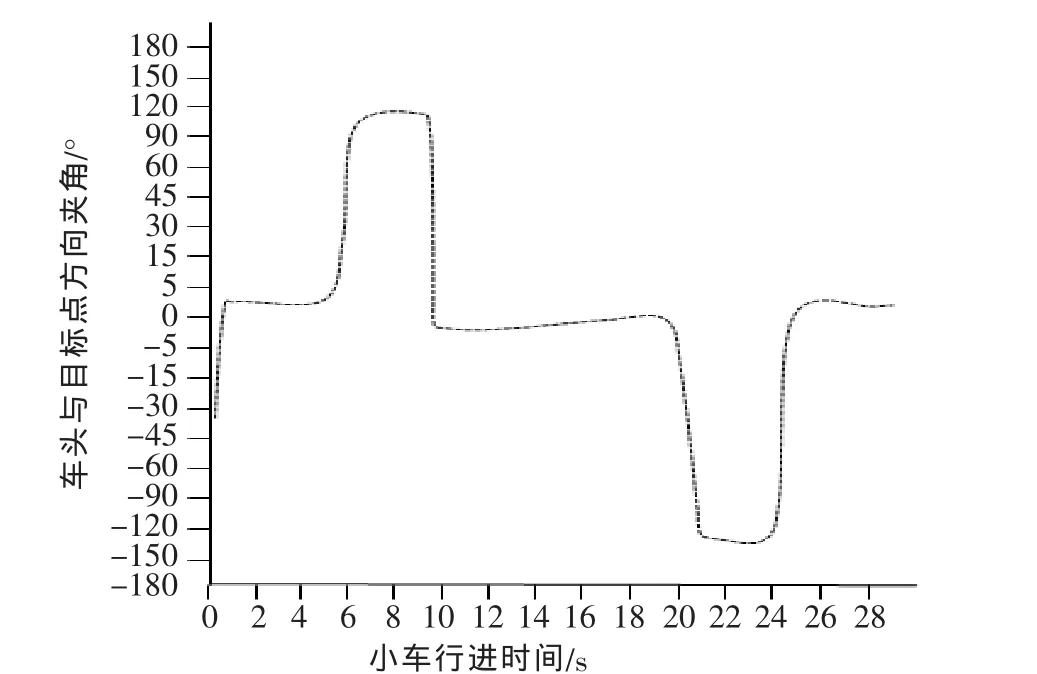
圖6 智能小車方向角φ與時間關系
4 結束語
本系統使用安卓客戶端遠程無線控制運動系統,并監測室內環境數據和安全狀態,智能小車可自動充電。對于室內環境的監測有兩種模式:一種是智能小車完成路徑規劃和自動避障動態監測室內環境狀況 (視頻監控、溫度、濕度及煙霧指數),質量狀況超過安全值時自動報警并反饋給客戶端;而另一種模式是使用客戶端實時控制智能小車走向,并且安卓手機上實時顯示所有傳感器的實時傳感數據,對特別關心的地點可拍照傳回,保證一些安全隱患早發現早預防,對保護人身財產安全等起到至關重要的作用。系統具有很大升級空間,可以擴展功能,實現更為復雜的控制。
[1]WATANABE K,UMEMURA M,HIGASHIKUBO M.Development of video surveillance device[Z].Sumitomo Electric Industries Ltd,2013(76):90-93.
[2]BARRERA E,RUIZ M,MACHON D.PXI-based architecture for real-time data acquisition and distributed dynamic data processing[J].IEEE Transactions on Industrial Electronics,2006,3(53):923-926.
[3]THOMPSON B,YOON H S.Efficient path planning algorithm for additive manufacturing systems[J].IEEE Transactions on Components,Packaging and Manufacturing Technology,2014,9(4):1555-1563.
[4]ZIDEK K,RIGASOVA E.Path planning algorithm based on search algorithm,edge detector and GPS data/satellite image for outdoor mobile systems[J].IEEE International Symposium on Applied Machine Intelligence and Informatics(SAMI),2012,11(26):349-354.
[5]溫陽東,王祥好.基于線陣 CCD的智能小車路徑識別系
統[J].合肥工業大學學報(自然科學版),2009,9(32):1348-1352.
[6]KIM S J,KIM B K.Dynamic ultrasonic hybrid localization system for indoor mobile robots[J].IEEE Transactions on Industrial Electronics,2013,60(10),4562-4573.
[7]紀欣然.基于 Arduino開發環境的智能尋光小車設計[J].現代電子技術,2012,15(35):161-163.
Intelligent environmental monitoring system based on path planning
Zhang Yiqun,Cheng Shuying
(Institute of Micro-Nano Devices&Solar Cells,Fuzhou University,Fuzhou 350108,China)
An autonomous mobile intelligent vehicle system based on the S3C2440 embedded processors can automatically complete path planning and obstacle avoidance after Android client sends location information.The processor will feature a small car equipped with sensors to collect real-time data and feedback it to the client,achieve dynamic monitoring for the environmental quality of indoor situation(real-time video monitoring,temperature,humidity and smog index).And the functional sensors are installed in the designated locations,which use the ZigBee wireless module to achieve the interaction point of environmental data acquisition and motion systems and then back to the clients.When the motion system is in low supply power,it will be charged under the automatic control of the charging unit automatically.The test results show that the motion system is stable and has a good real-time.
S3C2440;embedded;autonomous mobile;path planning;auto charging;environmental monitoring
TP274.2
A
1674-7720(2015)05-0082-03
(2014-11-05)
張義群(1990-),男,碩士研究生,主要研究方向:嵌入式系統、圖像處理。
程樹英(1966-),女,教授,博士生導師,主要研究方向:光伏材料、器件及其應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
