新型人字齒同步帶帶輪齒廓曲面加工特性研究
2015-08-30 09:22:56郭建華姜洪源胡清明孟慶鑫
哈爾濱工程大學學報 2015年1期
郭建華,姜洪源,胡清明,孟慶鑫
(1.哈爾濱工業大學 機電工程學院,黑龍江哈爾濱150001;2.齊齊哈爾大學機電工程學院,黑龍江 齊齊哈爾161006)
嚙合傳動是機械傳動中重要形式,不同的嚙合方式中輪齒廓曲線形式不同,如漸開線齒廓[1]、圓弧齒廓、擺線齒廓、雙漸開線齒廓[2]及其他齒輪,如非對稱斜齒廓、正交面齒輪[3]、標準圓弧線圓柱齒輪、橢圓齒輪[4]、圓形螺旋錐齒輪[5]等,進行滾切加工過程中都涉及根切問題。研究根切的本質是找出根切原因,分析根切可能導致齒形變化是否能滿足設計要求,以便設計、加工時力求避免根切發生。研究根切問題需從嚙合原理研究入手,假設Σ2是形成齒輪齒面Σ1的工具面,數學上防止根切是包絡齒廓曲面Σ1上出現奇異點[6]。
同步帶輪的加工通常由專用滾刀加工,且由于同步帶傳動形式的特殊性,需對帶輪全部輪廓進行加工。新型人字齒同步帶傳動設計具有壽命長、傳動精度高、傳動噪聲低等傳動特點[7-9]。采用范成原理加工的帶輪齒廓能否實現設計要求,將直接影響傳動設計效果。人字齒帶輪由左右旋帶輪裝配而成,單只螺旋帶輪齒廓是由7段空間曲面連接而成。本文根據新型人字齒同步帶與帶輪傳動嚙合關系建立帶輪加工刀具齒面空間模型,研究刀具曲面Σ2與帶輪曲面Σ1之間共軛條件、瞬時嚙合線形成、包絡齒廓曲面Σ1的根切界限函數、工具面Σ2上嚙合界限函數計算公式。通過數值計算分析,研究各空間曲面的瞬時嚙合線形成原理,分析根切界限和嚙合界限條件,為刀具設計提供理論依據。
1 新型人字齒同步帶帶輪刀具齒廓曲面建模Σ2
刀具曲面Σ2模型由法面齒形做螺旋運動形成。齒條刀具曲面Σ2與加工帶輪曲面Σ1坐標系轉換關系,見圖1。
人字齒同步帶輪滾刀法面齒廓為對稱齒形,齒廓方程建立在法面坐標系 σn=[on;xn,yn,zn]中,右側齒廓由直線ab、頂弧(rp1)bc、側弧(rp2)cd、根弧(rp3)de組成。各段曲線采用極坐標表示,且各圓弧連接點對應極坐標轉角分別為 θb、θc、θd、θe。刀具法面齒廓分段矢量方程為:
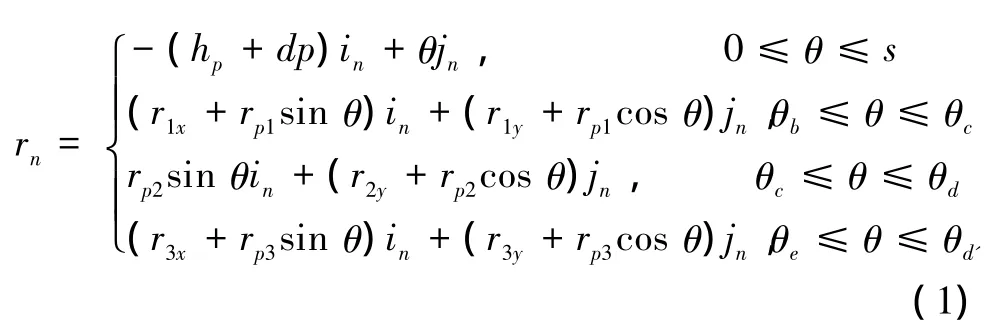
式中:(rix,riy)i=1,2,3,表示圓弧曲線bc、cd、de圓心坐標。斜齒條固連在端面坐標系σ2=[o2;x2,y2,z2]中,原點o2為齒對稱線與節線交點,齒條空間三維曲面Σ2表達式為:

式中:β為螺旋角,u為刀具沿z方向距離。將方程(1)代入(2)中,得到刀具齒條在σ2中平面、3段圓弧曲面Σ2參數方程:


圖1 齒條刀具與加工帶輪坐標系轉換關系Fig.1 Coordinate conversion relationship of hob and pulley
方程(3)中Σ2曲面矢徑r2為關于u和θ的分片曲面函數,θ取值區間不同,對應曲面不同。
2 確定刀具曲面Σ2與帶輪曲面Σ1嚙合方程及帶輪曲面Σ1方程
斜齒條刀具曲面Σ2加工帶輪曲面Σ1,如同一對共軛嚙合的空間齒條、齒輪傳動。對于斜齒條刀具與帶輪關系,采用瞬時回轉軸法確定嚙合函數。共軛接觸面Σ2上的瞬時接觸點的法線應當通過嚙合軸z,見圖1。在σ2中法線方程為:

式中:曲面 Σ2上nx2、ny2、nz2為法矢n2在坐標系 σ2中分量;X2、Y2、Z2分別為法線與嚙合軸的交點X2=0、Y2=r1φ1、Z2=0坐標,r1和φ1分別代表帶輪的節圓半徑和轉角。參數代入式(4)得:

在曲面Σ2上法矢定義:

由式(6)得平面和圓弧段曲面的法矢方程為:

式中:θj中j代表b、c、e;θl中l代表c、d及d'。將式(7)代入式(5)分別得出直線段與3圓弧曲線段瞬時嚙合線統一表達式為:

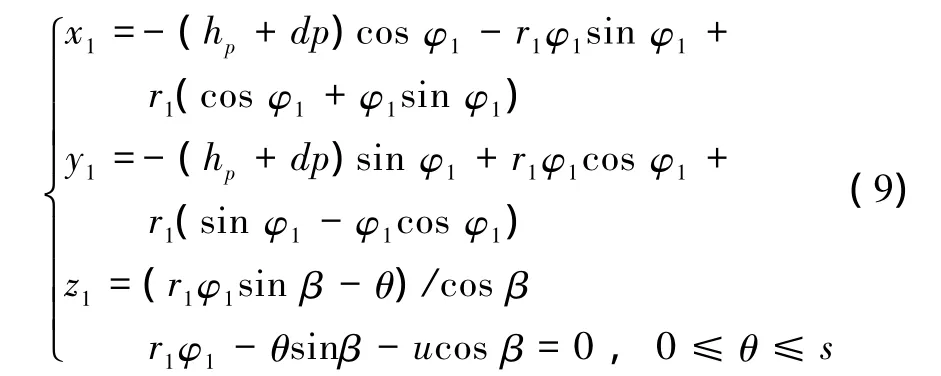
利用圖1坐標系σ2到坐標系σ1的變換關系,聯立式(3)和(8),得帶輪曲面Σ1分片曲面方程,對應刀具平面的帶輪曲面方程為:
對應刀具圓弧曲線bc的帶輪曲面方程為:

對應刀具圓弧曲線cd的帶輪曲面方程為:

對應刀具圓弧曲線de的帶輪曲面方程為:

3 確定帶輪曲面Σ1根切界限點和刀具曲面Σ2嚙合界限點
斜齒條刀具加工帶輪時,帶輪曲面Σ1不產生根切點方程為

曲面Σ2與Σ1接觸點的相對運動速度v(21)2是齒條以角速度ω(21)2=ω(1)·k2繞瞬時軸Z回轉速度:

將(14)代入(13)得根切界限方程為:
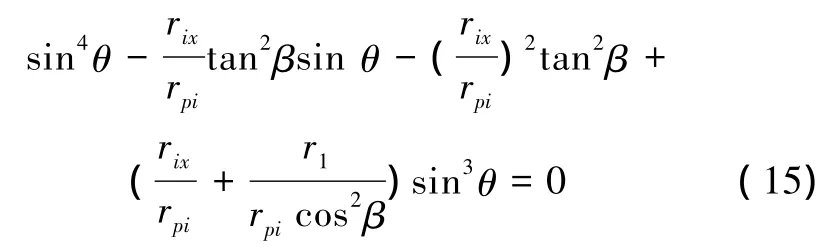
或

滿足刀具齒面Σ2參與切削帶輪曲面Σ1嚙合界限點方程是對方程(8)求導得:

刀具曲面Σ2上沒有嚙合界限點曲線,曲面Σ2全部參加加工帶輪曲面Σ1,刀具曲面Σ2建模是合理的。
4 帶輪齒廓曲面加工特性分析
表1提供滾刀法面齒廓的標準齒形參數,圖2表示加工齒數Z=34、帶輪寬16 mm、螺旋角30°,當φ1=0.1 rad時,帶輪齒廓曲面Σ1和其上形成的瞬時嚙合線。式(8)刀具側弧段cd,形成瞬時嚙合線方程式:r1φ1-(0.5w-rp2)sinβ-ucosβ=0,與弧極坐標轉角θ無關,轉角φ1一定,瞬時接觸線是距端面u距離法平面上半徑為rp2的圓弧曲線,刀具的齒頂圓弧bc、齒根圓弧de、齒頂直線段ab形成的瞬時嚙合線是空間曲線。瞬時接觸線延長,在帶輪加工過程中,加工末期切削阻力劇增,引起滾齒機振動,影響加工精度。根據上述理論分析制定特殊切削方案,帶輪加工過程得到滿意的結果。

表1 刀具法面齒形參數Table 1 Parameters of hob normal tooth profile

圖2 帶輪齒槽曲面與瞬時嚙合線Fig.2 Profile of pulley groove and Instantaneous meshing line
圖3表示不產生根切的最小帶輪齒數與刀具各段圓弧轉角范圍關系。式(15)影響根切臨界點參數r1或齒數z、θ。刀具齒頂圓弧rp1和側弧rp2在給定的θ范圍內,如圖3(a)、(b)沒有產生根切。刀具根圓弧rp3在90°≤θ≤169.6°范圍內,如圖3(c)產生根切。對應最小齒數22時,θ=157°。轉角達到最大值 θ=167.6°,不根切齒數z=253。滿足式(16)條件,意味θ=±90°,產生根切臨界點。在刀具bc弧端點b,de弧端點e是根切臨界點,因是曲線端點對帶輪齒廓無影響。
通過仿真分析,刀具齒根弧rp3形成的變態漸開線等距曲線為折返線,折點為根切點J,如圖4。隨不根切臨界齒數增大,根切點J與刀具側弧與根弧交點的共軛點d逼近。當z<253,根切點J和交點d在帶輪齒側與帶輪齒頂交點D右上側,實際加工時,帶輪的實際輪廓曲線為EDC,根切點J和交點d在切削時已經切掉,對齒廓無影響。

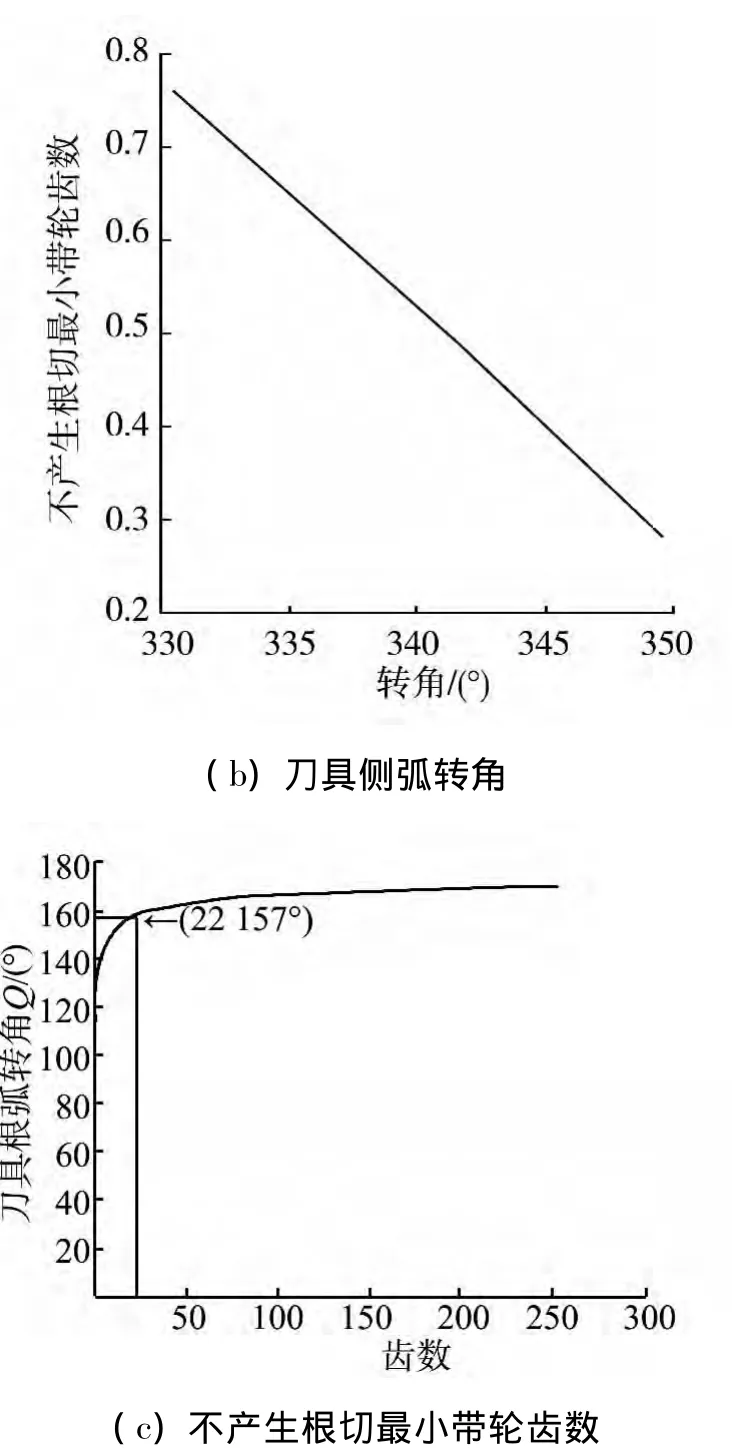
圖3 不產生根切的最小帶輪齒數與圓弧轉角關系Fig.3 Relationship of minimum pulley teeth without undercutting and arc angle
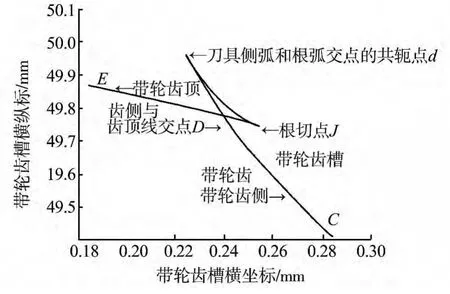
圖4 根切點與帶輪齒槽關系Fig.4 Relationship of undercutting point and pulley groove
5 結論
基于新型人字齒同步帶傳動機理,建立加工帶輪滾刀刀具曲面Σ2空間齒廓模型,并對加工過程帶輪形成曲面Σ1特性進行計算研究,得出如下結論:
1)通過對刀具空間齒廓曲面Σ2函數與嚙合函數計算,得出刀具齒廓曲面Σ2模型不存在嚙合界限點,且模型建立合理。
2)刀具加工帶輪齒廓曲面Σ1存在2種根切界限點,一是刀具曲面Σ2頂弧b點和根弧e點,但它們是曲線端點,不會產生根切;另一是帶輪齒頂的變態漸開線等距曲線,存在根切,但實際切削過程中根切點位置被刀具齒側弧形成曲面切掉。帶輪齒面產生“棱線D”,齒數越小,越明顯。消除棱線方法對刀具進行修形設計。
3)刀具齒側弧加工帶輪形成的共軛瞬時嚙合線為該法面半徑相等的圓弧,刀具齒廓其他曲線部分形成的瞬時嚙合線越遠離法平面空間曲線且延長曲折,瞬時接觸線越長,切削阻力越大,易引起機床振動。基于上述理論研究,實際加工過程中通過控制滾刀參與切削的齒數,可降低切削阻力并保證帶輪加工質量。
[1]ALIPIEV O,ANTONOV S,GROZEVA T.Generalized model of undercutting of involute spur gears generated by rack-cutters[J].Mechanism and Machine Theory,2013,64(6):39-52.
[2]樊智敏,朱東華.圓柱齒輪嚙合干涉及根切的分析研究[J].機械設計與制造,2003,8(4):24-26.FAN Zhimin,ZHU Donghua.Analysis and study on meshing interference and undercutting of cylindrical gears[J].Mechinery Design and Manufacture,2003,8(4):24-26.
[3]李政民卿,朱如鵬.正交面吃輪齒廓的幾何設計和根切研究[J].華南理工大學學報,2008,36(2):78-82.LIzheng Minqing,ZHU Rupeng.Investigation into geometrical design of tooth profile and undercut for orthogonal face gear[J].Journal of South China of Technology,2008,36(2):78-82.
[4]BAIR B W.Computer aided design of elliptical gears[J].Journal of Mechanical Design,2002,124(4):787-793.
[5]FONG Z H,TSAY C B.The undercutting of circular-cut spiral bevel gears[J].Mech.Des,1992,114(2):317-325.
[6]TEWEN L.Principles of gear connection [M].(s.l.):The Shanghai Science and Technology Publishing House,1984:288-296.
[7]MICHAEL J,GREGG W.Synchronous drive belt using helical offset teeth[C]//The Meeting of the Rubber Division,American Chemical Society.Chicago,Illinois,1999:55-68.
[8]郭建華,鄭娜,姜洪源,等.基于ANSYS的新型人字齒同步帶受力分析[J].機械傳動,2012,36(2):60-62.GUO Jianhua,ZHENG Na,JIANG Hongyuan,et al.The finite element analysis of double helical synchronous belt based on ansys[J].Mechanical Transmission,2012,36(2):60-62.
[9]姜洪源,郭建華,胡清明,等.基于高階接觸嚙合理論的新型人字齒同步帶傳動設計[J].機械傳動,2013,37(8):17-20.JIANG Hongyuan,GUO Jianhua,HU Qingming,et al.Double helical synchronous belt transmission design based on theory of high degree contact mesh[J].Mechanical Transmission,2013,37(8):17-20.
