純電動汽車電液制動系統及控制策略
2015-09-04 06:07:38樊少軍薛建高左華山范樹軍
汽車工程師 2015年11期
樊少軍 薛建高 左華山 范樹軍
(第二炮兵工程大學士官學院)
由于受電池和電機等技術的限制,純電動汽車的續駛里程短和成本高這2個問題嚴重地阻礙了其商品化。再生制動可以通過電機將汽車的動能或者勢能轉化為電能儲存在蓄電池中以備下次驅動所用,這樣就可以降低純電動汽車的能耗,提高純電動汽車的經濟性能。因此,在目前的純電動汽車關鍵技術研究中,再生制動已成為一種降低能耗、提高續駛里程和汽車節能與環保的關鍵技術手段,而再生制動的實施要基于良好的電液制動系統和有效的綜合控制策略。文章主要論述再生制動系統的意義、工作原理和電液復合制動系統的控制策略。
1 純電動汽車再生制動的概念
1.1 純電動汽車能量損耗情況介紹
與傳統汽車相比,能夠進行再生制動是純電動汽車的一個顯著優點,這樣既可以提高純電動汽車的續駛里程,又可以減輕傳統制動系統的工作負荷。汽車在工作過程中各部分消耗的能量占總能耗的比例[1],如圖1所示。
從圖1可以看出,大約只有一半的驅動能量用于汽車的正常行駛。如果能將制動消耗的能量回收再利用,同樣的距離將只需要大約一半的驅動能量,汽車的能耗經濟性將得到很大的提高。然而傳統的機械摩擦制動使得這一部分能量都以熱能的形式耗散掉了。因此在純電動汽車的制動系統中實現再生制動功能具有非常現實的意義。
1.2 純電動汽車制動能量回收的研究現狀
純電動汽車采用電制動時,驅動電機運行在發電狀態,將汽車的部分動能回饋給蓄電池以對其充電,對延長純電動汽車的行駛距離是至關重要的。國外有關研究表明,在存在較頻繁的制動與啟動的城市工況運行條件下,有效地回收制動能量,可使純電動汽車的行駛距離延長10%~30%。制動能量回收要綜合考慮汽車動力學特性、電機發電特性、電池安全保證與充電特性等多方面的問題。純電動汽車和混合動力電動汽車最重要的特性之一是顯著回收制動能量的能力。在純電動汽車和混合動力電動汽車中,電動機可被控制作為發電機運行,從而將汽車的動能或位能變換為電能,并儲存在能量存儲裝置(各種蓄電池、超級電容、超高速飛輪或者它們之間的復合)中,得以再次利用,以延長其續駛里程。而制動能量回收較有意義的汽車還有城市公交車,城市公交車工況參考數據,如表1所示。
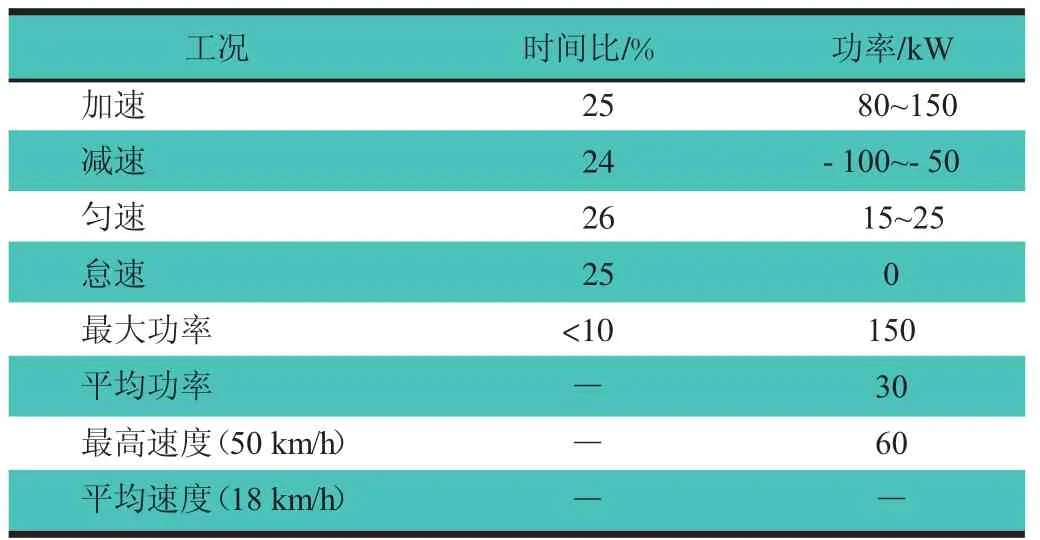
表1 城市公交車工況參考數據
由表1可知,其減速的功率較大,達到-100~-50kW(這也是因為純電動汽車或混合動力電動汽車本身裝備了一個較大功率的電動機,使得回收制動能量可行),占的時間比約為24%,制動消耗的能量占牽引能量的比重較大。由于城市公交車目前一般為內燃機動力,故如何低成本有效回收其制動能量具有一定的難度。
對于汽車,成功地設計其制動系統必須始終滿足2個截然不同的要求。首先,在緊急制動狀態下,必須促使汽車在盡可能短的距離中停止;其次,必須保持對于汽車方向的控制。前者要求在所有的車輪上制動系統能供給足夠的制動轉矩,后者要求在所有的車輪上平均分配制動力。一般而言,當純電動汽車或混合動力汽車減速、在公路上放松加速踏板巡航(有相關的算法判斷)或踩下制動踏板停車時,再生制動系統啟動。正常減速時,再生制動的力矩通常保持在最大負荷狀態;純電動汽車或混合動力汽車高速巡航時,其電動機一般是在恒功率狀態下運行,驅動扭矩與驅動電機的轉速或車速成反比。因此,研究純電動汽車的制動模式也非常重要。
由于制動能量回收工作主要在城市工況下有較大意義,而城市工況車輛的最高車速不會太高,且緊急制動的概率較小,所以應將研究重點放在中輕度剎車制動能量回收方向上。
圖2示出電動機再生制動和液壓制動系統復合示意圖。電動機的再生制動力矩通常不能像傳統燃油車中的制動系統一樣提供足夠的制動減速度,所以,在純電動汽車和混合動力電動汽車中,再生制動和液壓制動通常共同存在。不過,只有當再生制動已經達到了最大制動能力而且還不能滿足制動要求時,液壓制動才起作用。因此,液壓與再生制動系統兩者的特定設計和控制是重要的關注點。
2 再生制動的工作原理
再生制動就是汽車制動時,保持電機與傳動系的有效連接,利用電機的回饋制動特性將汽車的動能或勢能轉化為電能儲存到電池等儲能裝置中,用于下一次汽車驅動加速所用,同時通過傳動系向驅動車輪提供制動力矩[2]。雖然純電動汽車有不同的結構形式,但其制動系統都由再生和摩擦制動系統組成,制動的工作模式有3種,如圖3所示。其再生制動的具體工作原理,如圖4所示。
再生制動系統的組成,如圖5所示,其中電機制動系統與液壓制動系統合稱為電液復合制動系統。控制器的作用是根據駕駛員的制動意圖,利用再生制動力分配控制策略實現電機制動力和機械制動力的分配,并控制相應的執行機構追蹤目標信號;再生制動操縱機構負責正確識別駕駛員的制動意圖,即制動強度和保證駕駛員的制動感覺與傳統制動系統的感覺相一致,并且當再生制動系統失效時,能保證液壓制動系統正常工作;液壓制動單元要能夠提供由控制器輸出的機械制動力的大小;電機和電池系統負責提供控制器輸出的電機制動力和回收并儲存制動能量。
事實上,并不是所有的純電動汽車制動能量都可以通過再生制動的功能來實現回收與利用,在純電動汽車上,只有驅動軸上的制動能量可以沿著與之相連接的驅動軸通過電機的發電特性將制動能量轉化為電能并傳送至電池裝置中,而制動能量的另一部分將由非驅動軸上或驅動軸上的車輪通過機械摩擦制動以熱能的形式浪費掉。驅動軸上的制動能量也不能通過再生制動來完全回收,制動能量回收時還受到許多因素的限制,例如:再生制動的回收功率不能超過電池當前的最大充電功率、電機發電能力的限制、電池充電功率的限制、電機制動產生的最大制動轉矩不能超過當前轉速和功率下電機發電能力、車速較高時電機再生制動扭矩不能滿足大強度制動要求及驅動系布置方案的限制等。因此設計一套高效的電液復合制動系統,并配套合理的綜合控制策略將大大提高再生制動對整車燃油經濟性提高的貢獻。
3 電液復合制動系統控制策略
由于純電動汽車行駛過程中存在著不同的制動狀態,在小強度或中等強度制動時,為提高制動能量回收效果,通常優先考慮再生制動,整車制動力不足的部分則由液壓制動來補充;當車輪出現抱死或電池不允許回收制動能量時,為保證整車制動安全性,通常不采用再生制動,只采用液壓制動。因此傳統汽車的制動系統難于滿足純電動汽車的制動需求,不能直接用于純電動汽車中。
3.1 ABS綜合控制策略
傳統汽車的制動系統無論是機械式、氣動式、液壓式還是氣液混合式,它們的制動原理都是相同的,即依靠制動器摩擦的方式來消耗掉汽車行駛的動能或勢能,從而達到減速的目的[3]。純電動汽車再生制動的基礎是傳統轎車的液壓制動系統,因此在達到能量回收目的的同時,不改變傳統轎車制動習慣就顯得尤為重要。但是,傳統的制動系統無法最大限度地配合電機進行再生制動,并且由于再生制動的加入改變了駕駛員傳統的制動感覺,這樣制動能量的回收效果就會受到限制,因此對傳統制動系統做適當的改造來達到再生制動的功能是必要的。ABS(制動防抱死裝置)越來越多地應用在傳統汽車中。ABS的核心部件為高速開關閥,高速開關閥與脈寬調制(PWM)控制相結合后,可以通過控制一定頻率的脈沖寬度來實現對液壓壓力的連續控制[4]。
所以通常將采用ABS硬件單元作為電液復合制動系統中液壓制動力的控制元件,同時制定適當的綜合控制策略,通過電液復合制動系統和綜合控制策略的完美組合以實現最大限度地配合電機進行再生制動,從而達到良好的能量回收率和制動安全性。
3.2 協調制動控制策略
協調制動控制策略的首要目標是利用電機響應速度和響應精度的優勢改善制動系統的響應特性,使電機和EVB(電子真空助力)提供的制動轉矩之和滿足需求制動轉矩,以保證制動安全性。結合電機與EVB動態響應特性,協調制動控制策略的基本思想是:通過基于期望制動轉矩預測的EVB預測啟動控制策略,保證EVB接入過程中的安全性;通過基于電機制動轉矩動態補償的制動轉矩協調控制策略,精確響應需求制動轉矩的變化。綜合考慮制動轉矩大小和能量回收能力,將制動分為3個模式:經濟性制動模式、SOC低時的安全性制動模式和SOC高時的安全性制動模式。
制動過程中,隨著需求制動轉矩和制動能量回收能力的改變,系統進入不同的制動模式。進入經濟性制動模式時,只需要電機單獨制動;如果進入SOC低或SOC高時的安全性制動模式,則首先采取EVB預測啟動控制策略,然后進行制動轉矩協調控制。如果電機制動系統和EVB制動系統分別響應協調制動控制策略中的電機制動轉矩指令和EVB制動轉矩指令,則由電機轉矩和EVB制動轉矩共同實現對汽車的制動。
4 結論
再生制動是電動汽車的一項關鍵技術,再生制動不僅能通過回收制動能量來降低整車能耗,而且可以減輕液壓制動器的負荷及制動器的磨損。由于電動汽車再生制動系統是液壓制動和電機再生制動的復合系統,所以在制動過程中液壓制動力和再生制動力的協調控制是保證制動安全性和最大化回收制動能量的重要保障,是再生制動的技術難點。
文章提出的電液制動系統只是從理論分析和策略的角度提出了電液制動系統的可行性,后續的研究主要是建立電動汽車電液制動系統壓力協調控制的仿真平臺,以及電液制動系統和壓力協調的控制問題,從而在硬件上實現ABS防抱死制動、再生制動和摩擦制動的集成。通過制定全路面條件下的制動力分配控制策略和基于路面識別的ABS防抱死控制策略,高度集成ABS防抱死制動、再生制動和摩擦制動的控制算法,來有效提高制動能量回收率和制動安全性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
