基于滑模觀測器的交流伺服電機無傳感器控制*
2015-09-06 09:45:59郭超偉高艷霞張曲遙宋文祥
電機與控制應用 2015年4期
郭超偉, 高艷霞, 張曲遙, 宋文祥
(上海大學 機電工程與自動化學院,上海 200072)
基于滑模觀測器的交流伺服電機無傳感器控制*
郭超偉,高艷霞,張曲遙,宋文祥
(上海大學 機電工程與自動化學院,上海200072)
研究了一種基于滑模觀測器的永磁同步交流伺服電機無傳感器控制方案。通過對靜止坐標系中永磁同步電機(PMSM)數學模型的分析,在滑模電流觀測器基礎上引入擴展反電勢(EEMF)估計值,其中包含傳統反電勢及與電機凸極性相關的電壓分量,構造了相應的滑模觀測器來估計兩相靜止坐標系中EEMF分量。通過分析抖振存在的原因,采用Sigmoid函數代替常數切換函數來減小抖振,并利用擴展龍貝格觀測器觀測出轉子的速度和空間位置。仿真結果驗證了控制方案的有效性和可行性。
交流伺服電機; 無傳感器控制; 滑模觀測器; 擴展龍貝格觀測器
0 引 言
永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)具有高轉矩慣性比、高能量密度、高效率、高可靠性等優點,高性能伺服系統大多采用永磁同步型交流伺服電動機,近年來在機器人、航空航天、電動汽車、工業控制等領域獲得了越來越廣泛的應用與發展[1]。高性能交流伺服系統需要有精確的轉子速度和位置信息,通常通過位置傳感器來獲得,但位置傳感器的使用增加了安裝尺寸和系統成本,降低了系統的可靠性和抗干擾性能,限制了系統的使用范圍。采用無位置傳感器控制技術有利于改善交流伺服系統可靠性,降低系統成本以及對使用環境的要求,具有重要研究意義[2-3]。
無傳感器控制的核心是轉子位置和轉速的估計。系統調速性能的好壞主要取決于狀態估計的精度和動態響應速度。目前,按照電機運行的適用范圍,無傳感器控制主要分兩種技術: (1) 利用電動機的空間凸極效應[2,4]。該方法可應用于較寬速度范圍,且低速時也可得到較好的估算結果,但具有高頻噪聲的問題,只適于內嵌式電機。(2) 狀態觀測器法[5],直接或間接地從電機反電動勢中提取位置信息。這類方法具有良好動態性能,適于表貼式和內嵌式電機,但在低速特別是零速時轉子位置估算困難,目前只適合于中高速場合。因此,研究一種適用于兩種電機的較寬運行速度范圍的無傳感器控制算法是關鍵。
滑模變結構控制是一種解決非線性系統問題的綜合方法,對系統數學模型精確度要求不高,對系統參數變化、內部攝動及外界環境擾動具有自適應性,故具有很強的魯棒性[6]。在基于狀態觀測器模型的方法中,滑模觀測器(Sliding Mode Observer, SMO)的估算方法既適用于表貼式PMSM,也適用于內嵌式PMSM,而且估算轉子位置準確、結構簡單、容易實現。
本文采用SMO估計反電動勢,為了減小抖振,SMO中采用Sigmoid函數代替常數切換的控制函數,采用擴展龍貝格觀測器,將轉矩指令作為龍貝格觀測器的前饋輸入,以獲得轉子位置的零相位滯后估計。最后,通過仿真驗證了所設計的SMO的正確性。
1 PMSM無傳感器矢量控制系統
PMSM定子上有A、B、C三相對稱繞組,轉子上裝有永久磁鋼,定子與轉子通過氣隙磁場耦合。假設磁路不飽和,在空間磁場呈正弦分布,不計磁滯和渦流損耗影響條件下,得到PMSM在d、q定子旋轉坐標系下的數學模型為
(1)
式中:ud、uq、id、iq——旋轉坐標系下的電壓和電流;
Ld、Lq——電機直軸和交軸電感;
p——微分算子;
Rs——定子相電阻;
ωr——轉子電角速度;
ψm——轉子磁鏈。
將式(1)轉換到α、β靜止坐標系下為
(2)
其中:
(3)
電壓方程中電流系數矩陣包含了與轉子位置有關的系數Lα、Lβ、Lαβ,即該矩陣是時變而非固定不變的,難以轉換為以電流為變量的狀態方程。
將式(1)改為
(4)
其中: λm=(Ld-Lq)(id-piq/ωr)+ψm。
式(4)轉換到α,β靜止坐標系下為
(5)
式(5)為同步電機數學模型的一般形式,若Ld=Lq,就等同于表貼式同步電機(Surface Permant Magnet Synchronous Motor, SPMSM)數學模型;若ψm=0,則成為同步磁阻電機模型。基于該數學模型,可以很方便地將應用于SPMSM的無傳感器控制方法應用于IPMSM。
EEMF中包含有iq的微分項,意味著即使轉速接近為零,只要iq在變化,EEMF就不會為零。這一特點使得低速甚至零速運行時位置、速度估計成為可能[5]。
轉矩方程:
Te=Pn[ψmiq+(Ld-Lq)idiq]
(6)
運動方程:
(7)
式中:Te——電磁轉矩;
Pn——電機極對數;
TL——負載轉矩;
J——轉動慣量;
ω——轉子機械角速度。
由式(6)可知,控制d軸電流id=0,則Te=Pnψmiq,所加定子電流全部用于產生電磁轉矩。本文采用id=0的矢量控制策略,該策略的優點是相同電磁轉矩下電機銅耗小、效率高。永磁電機無傳感器控制系統結構框圖如圖1所示。
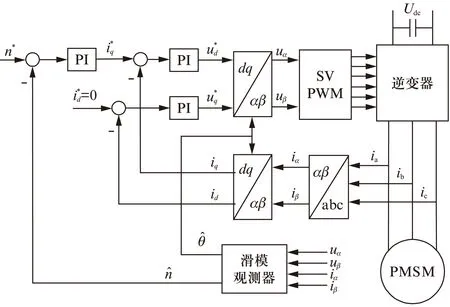
圖1 永磁電機無傳感器控制系統框圖
2 SMO設計
SMO模型可以根據電機在α、β坐標系下的模型來建立。它通過不斷獲取電流估計值和測量值之間的偏差來修正模型,使兩者之間的偏差逐漸消失,以實現對轉子轉角和速度的估計。
根據滑模變結構理論[6],構造出SMO:

(8)
式中:x∈Rn;u∈Rm;A,B(x)∈Rn*m。
定義滑模面:
(9)
控制函數為
(10)
為了便于應用SMO觀測EEMF,將式(5)的電壓方程改寫為電流的狀態方程形式:
(11)
根據PMSM在α、β靜止坐標系下的數學模型,構造傳統SMO如下:
(12)

Ksw——滑模系數,此系數的選取必須滿足滑模存在性和可達性。

(13)
由于實際系統非理想開關特性(具有時間和空間滯后),當系統的軌跡到達切換面時,控制作用對狀態的準確變化被延遲一定時間,并且在狀態空間中存在一個狀態量變化的“死區”,所以導致光滑的滑動模態上疊加一個鋸齒形的軌跡。
抖振的存在不僅影響控制的精確性,增加能量損耗,而且很容易激發系統中高頻未建模動態部分,破壞系統性能,甚至使系統產生振蕩或失穩,損壞控制器部件,因此抑制抖振顯得極為重要[7]。
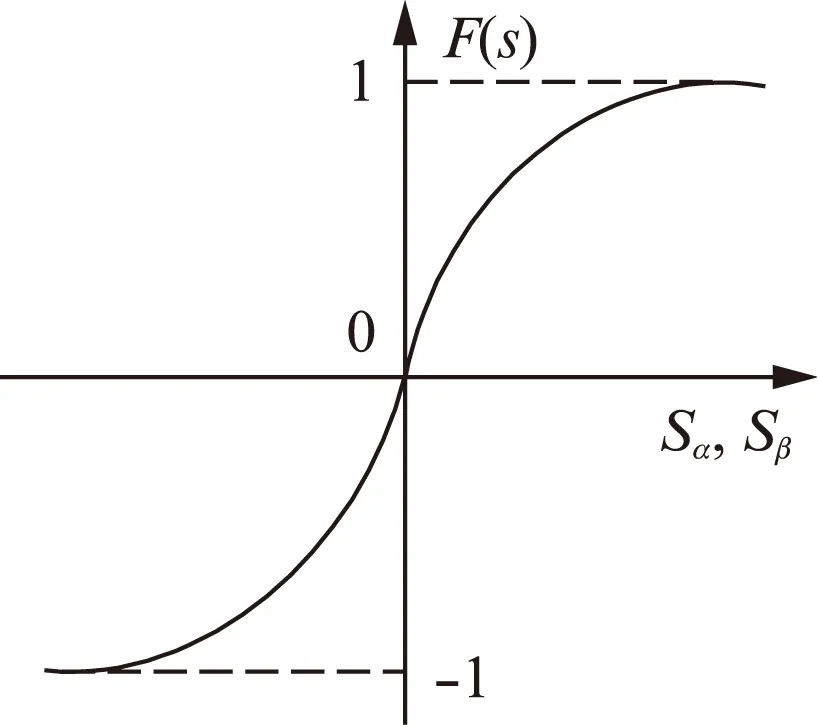
圖2 Sigmoid函數曲線
采用Sigmoid函數的SMO為
(14)
其中,a為Sigmoid函數的斜率,這里取a=1,由式(11)減去式(14)得
(15)
(16)
式中: eα、eβ——包含有高頻分量的反電動勢信號。
通過對其進行低通濾波得到連續的反電動勢:
(17)
式中: ωc——低通濾波器的截止頻率。
由上述分析可得到擴展反電動勢SMO的結構如圖3所示。
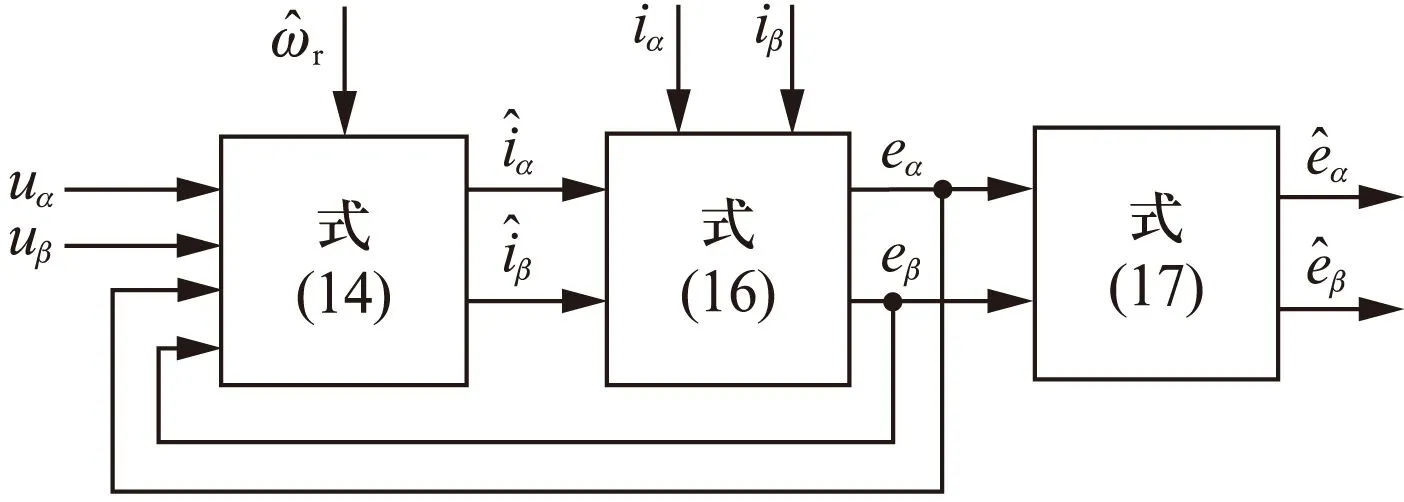
圖3 擴展反電動勢SMO結構
3 轉子速度和位置估計
由傳統的滑模電流觀測器可獲得擴展反電勢等效信號,但是還包含高頻分量,需要通過低通濾波器進行濾波后得到所需要的連續信號。低通濾波器的使用會帶來相位延遲的問題,并且延遲的相位與濾波器截止頻率以及輸入信號的角頻率有關,因此,采用對觀測得到的反電動勢取反正切函數計算位置信息的方法必須進行角度補償。
采用帶有電磁轉矩前饋控制的擴展龍貝格觀測器,可以濾除測量干擾信號并實現零相位滯后估計[10]。擴展龍貝格觀測器結構如圖4所示。
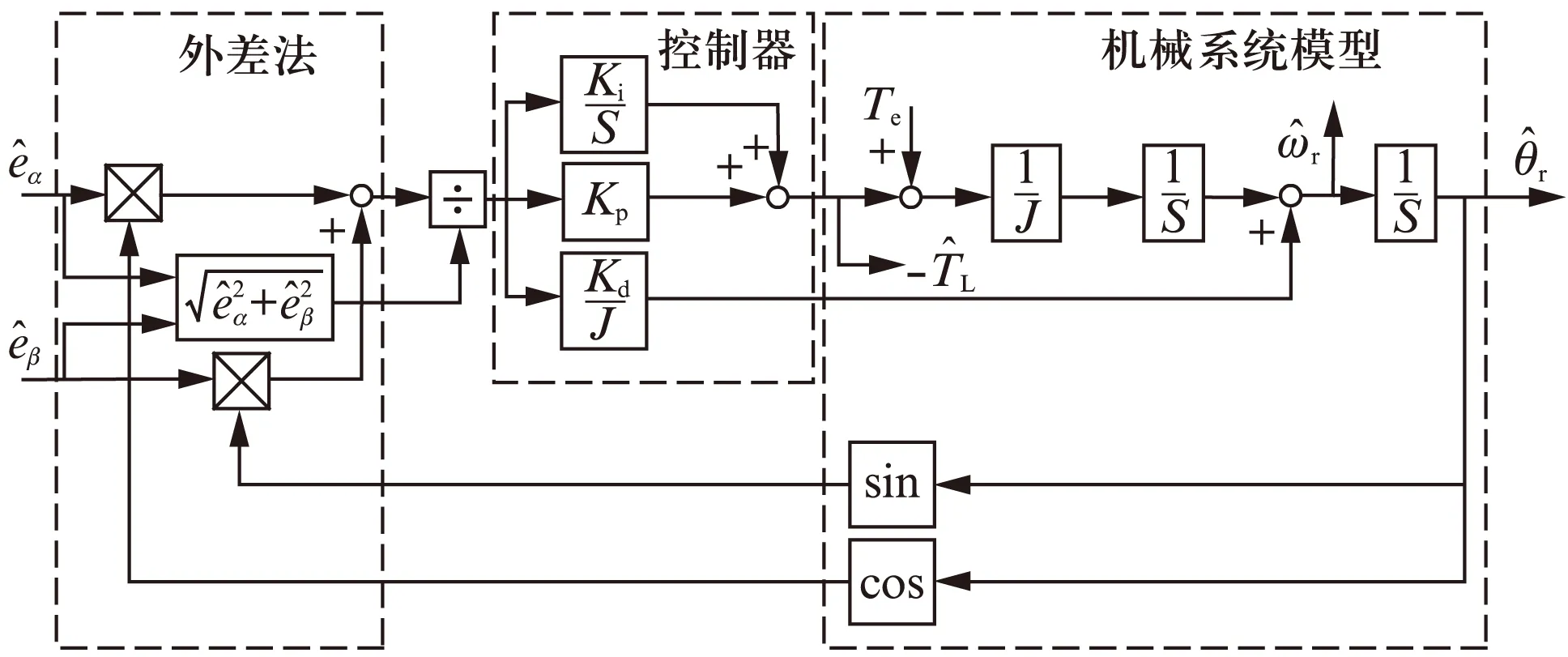
圖4 擴展龍貝格觀測器
通過外差法和歸一化運算得到相位跟蹤誤差信號,只要調節跟蹤誤差信號趨近于零,就可以保證估計的轉子位置角收斂于實際的轉子位置角。
由圖4給出的擴展龍貝格觀測器結構,可以得到估計轉子速度和位置的傳遞函數:
(18)
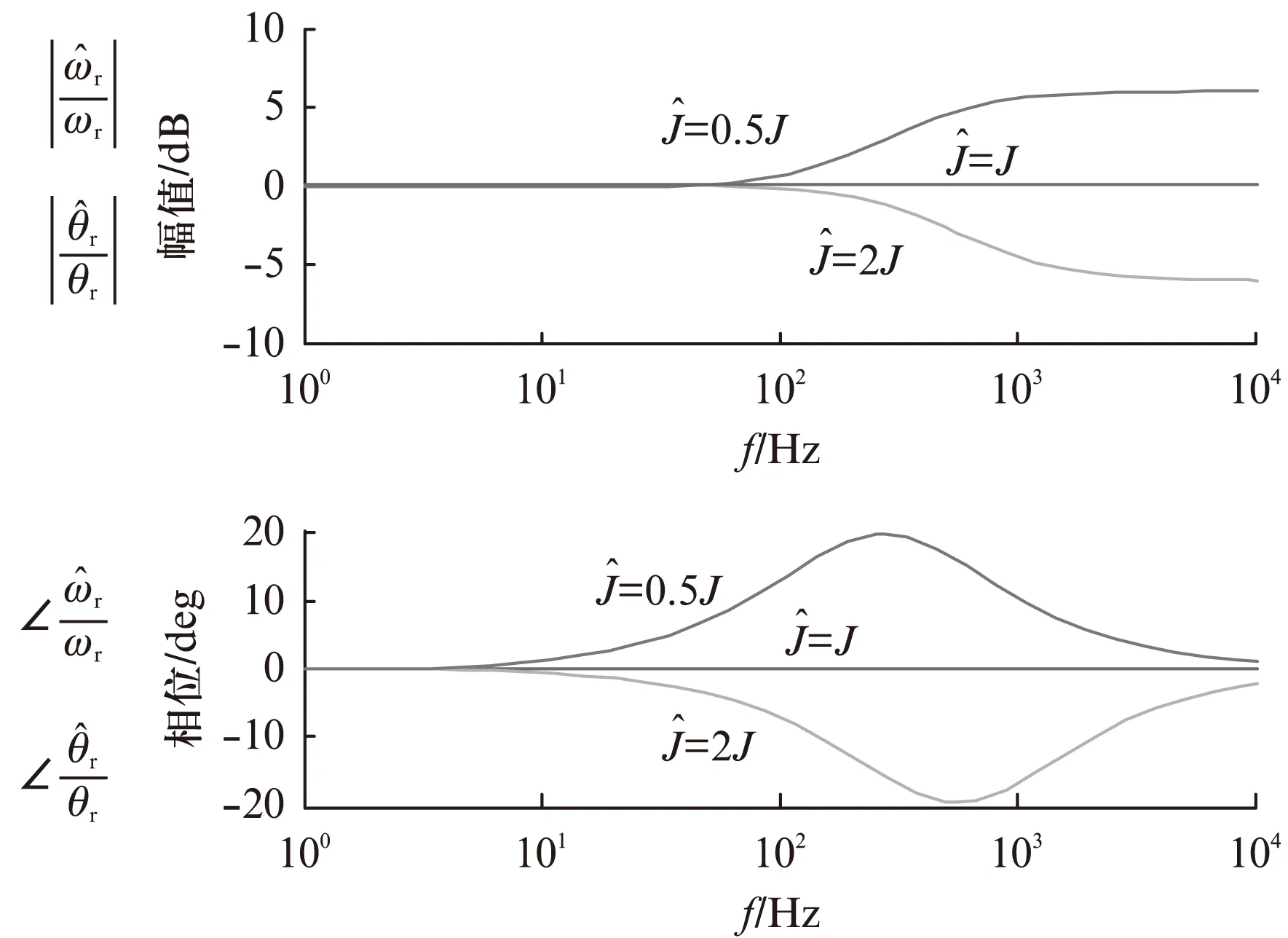
圖變化時轉子位置觀測器估計精度的幅頻響應
4 仿真結果
本文采用MATLAB/Simulink建立系統控制模型來驗證所提出方案的可行性。電機模型由Simulink內部提供,額定相電壓Us=220V,額定轉速2000r/min,額定轉矩Te=9.55N·m,定子電阻Rs=0.17Ω,繞組直軸和交軸電感分別為Ld=5mH、Lq=8.5mH,轉動慣量J=0.0012kg·m2,永磁體磁鏈ψm=0.175Wb,極對數pn=4。
電機空載條件下,在t=0時刻設定轉速450r/min, t=0.5s時刻轉速上升為750r/min,設定轉速、估計轉速與實際轉速波形如圖6所示。由結果可以看出,估計轉速能夠很快跟隨設定轉速,并且收斂于實際轉速,系統具有良好的動、靜態性能。
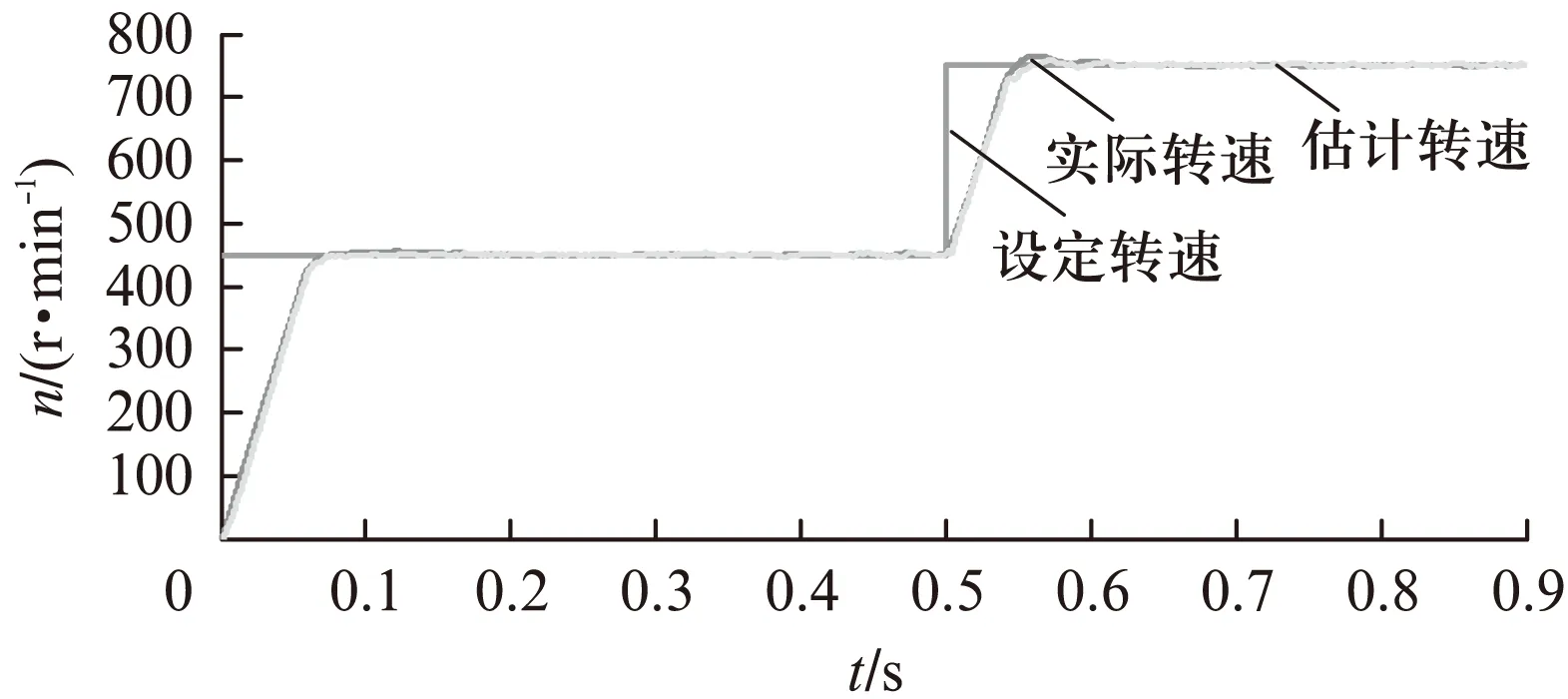
圖6 轉速波形
估計轉速與實際轉速的偏差如圖7所示,可看到電機穩態運行時估計轉速與實際轉速偏差在5r/min以內,能滿足系統的控制需求。
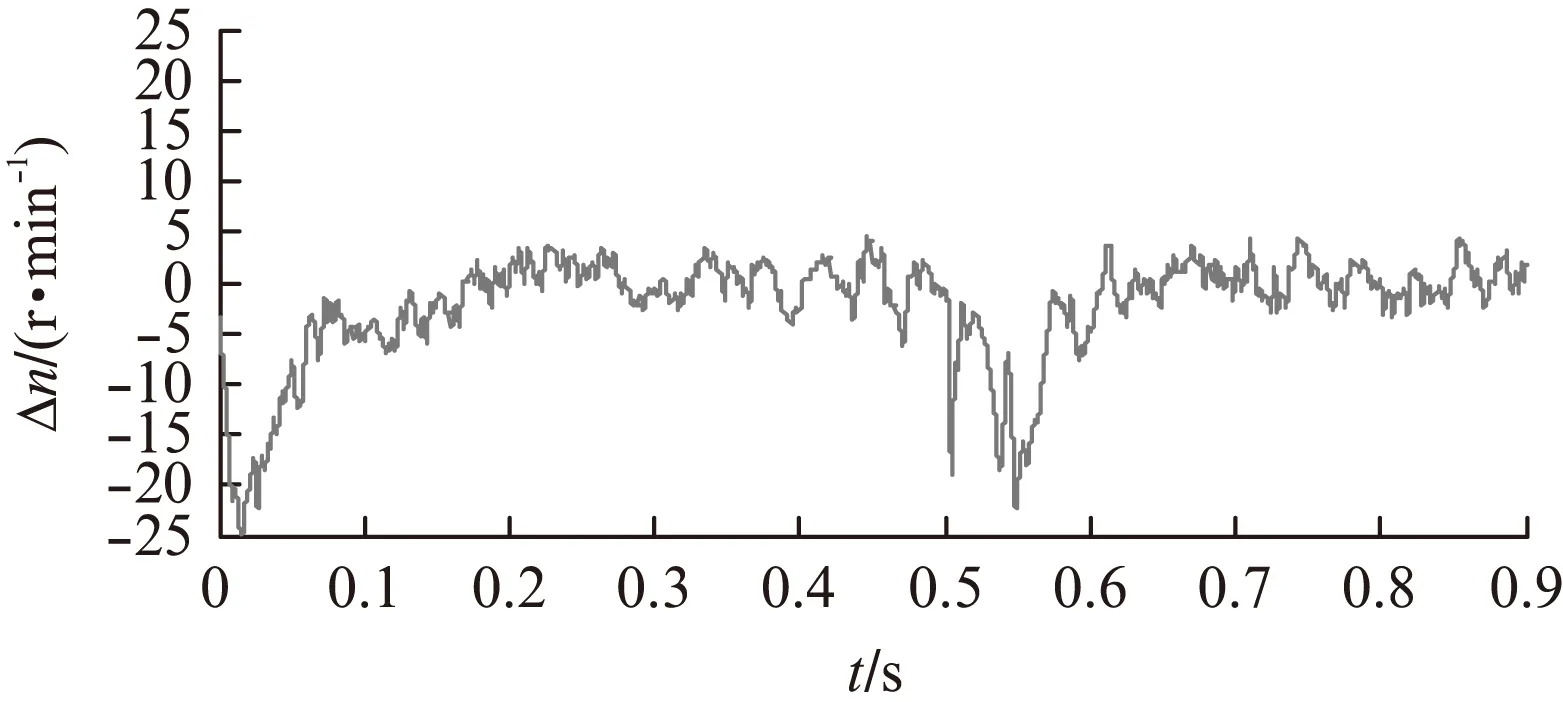
圖7 估計轉速與實際轉速偏差
估計擴展反電動勢波形如圖8所示,轉速切換瞬間出現一個尖峰,但很快會跟隨轉速變化,因此不會影響到電機的動態性能。
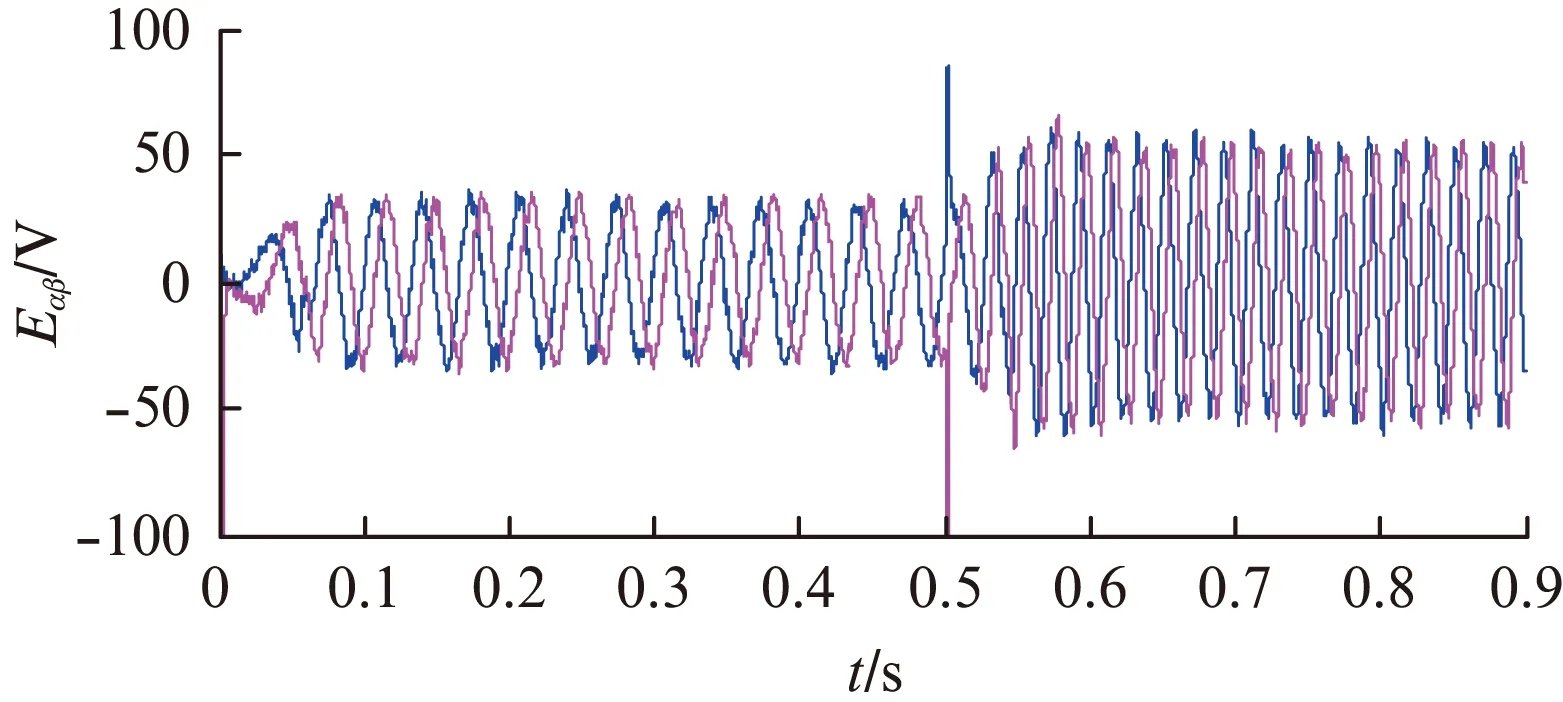
圖8 估計擴展反電動勢
轉子估計位置與實際位置波形如圖9所示,可以看出估計轉子位置能夠很好地跟隨實際轉子位置,具有良好的估計效果。此外,由圖10可看出,無論低速和高速運行,在穩態時估計轉子位置和實際轉子位置的偏差均在2°以內,實現了比較準確的轉子位置估計。
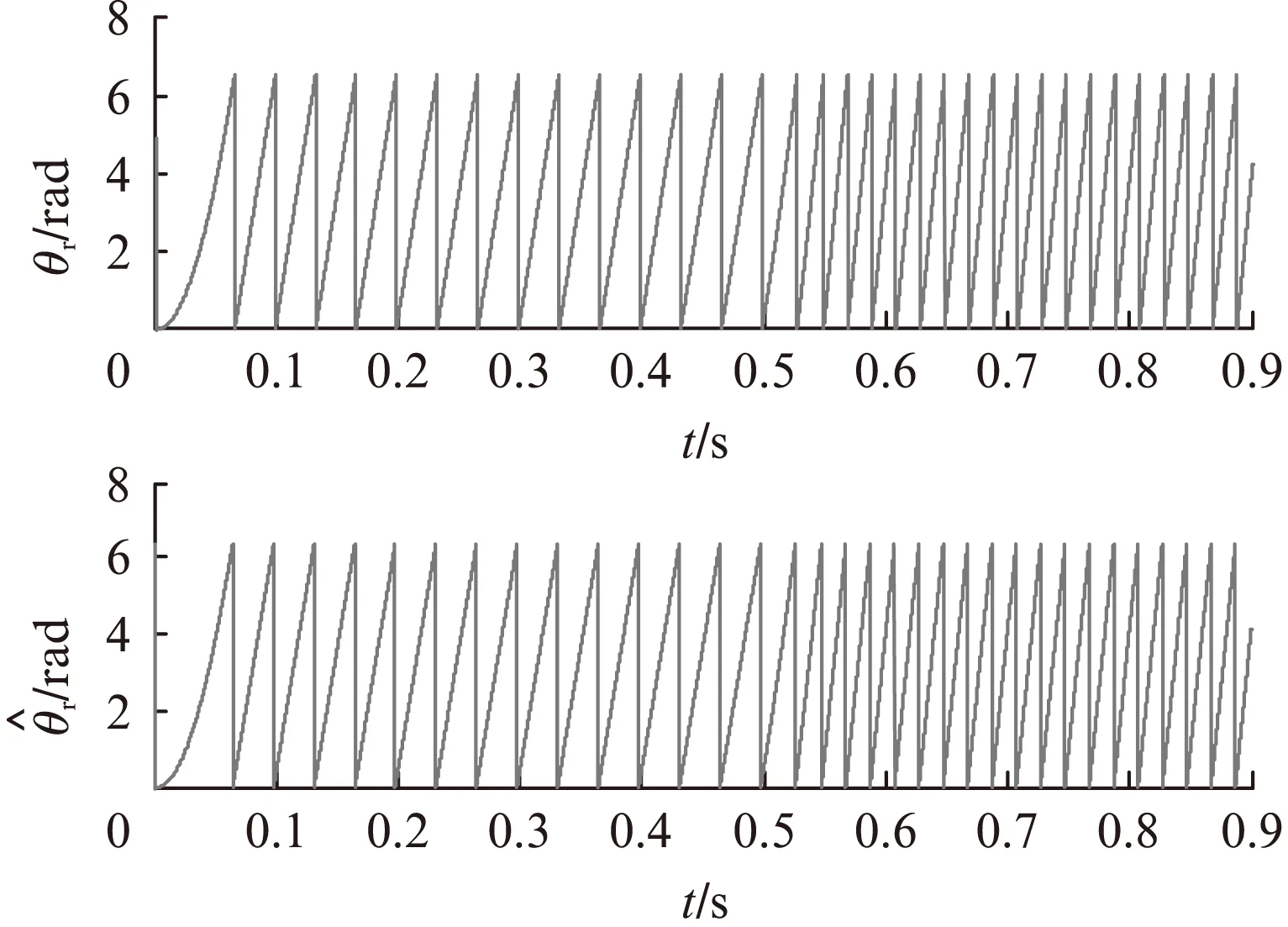
圖9 轉子實際θr和估計位置r
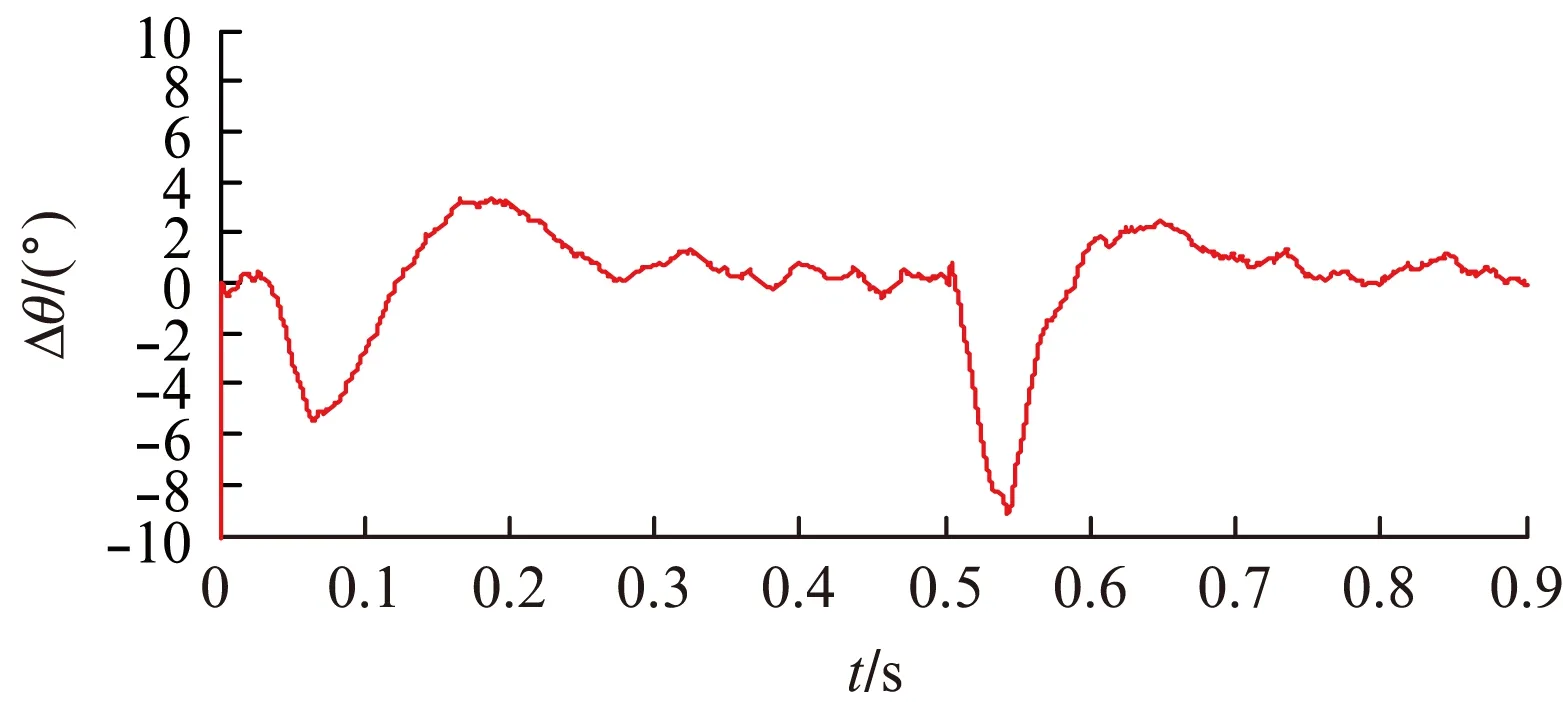
圖10 轉子位置角度偏差
5 結 語
本文采用SMO對擴展反電動勢進行觀測,通過選擇適當的滑模增益以克服系統不確定性和參數變化的影響,采用擴展龍貝格觀測器獲得了電機轉子速度和位置。仿真結果表明,所提出的方
法能夠在不需要轉子位置補償條件下有效實現轉子速度和位置的零相位滯后估計,系統具有良好的動、靜態性能,是一種實現交流伺服系統無傳感器運行的實用方法。
[1]陳亞愛,陳成,周京華.永磁同步電機轉子位置檢測技術[J].電機與控制應用,2013,40(7): 47-52.
[2]劉毅,賀益康,秦峰,等.基于轉子凸極跟蹤的無位置傳感器永磁同步電機矢量控制研究[J].中國電機工程學報,2005,25(17): 121-126.
[3]宋丹,吳春華,孫承波,等.基于滑模觀測器的永磁同步電機控制系統研究[J].電力電子技術,2007,41(3): 9-11.
[4]王高林,楊榮峰,于泳,等.內置式永磁同步電機無位置傳感器控制[J].中國電機工程學報,2010,30(30): 93-98.
[5]黃雷,趙光宙,年珩.基于擴展反電勢估算的內插式永磁同步電動機無傳感器控制[J].中國電機工程學報,2007,27(9): 59-63.
[6]王豐堯.滑模變結構控制[M].北京: 機械工業出版社,1998.
[7]劉金琨.滑模變結構控制MATLAB仿真[M].2版.北京: 清華大學出版社,2012.
[8]SRIKANTH V, AMAR D. A comparative study on the effect of switching functions in SMO for PMSM drives[C]∥2012 IEEE International Conference on Power Electronics, Drives and Energy Systems,2012: 1-6.
[9]邱忠才,郭冀嶺,肖建.基于Sigmoid函數的PMSM滑模變結構位置速度觀測器[J].電氣傳動,2014,44(3): 3-7.
[10]HYUNBAE K, MICHAEL C H, ROBERT D L. Sensorless control of interior permanent magnet machine drives with zero-phase lag position estimation[J]. IEEE Transactions on Industry Application, 2003,39(6): 1726-1733.
Sensorless Control of AC Servo Motor Based on Sliding Mode Observer
GUOChaowei,GAOYanxia,ZHANGQuyao,SONGWenxiang
(School of Mechatronics Engineering and Automation, Shanghai University, Shanghai 200072, China)
A sensorless control method of permanent magnet synchronous AC servo motor based on sliding mode observer (SMO) was presented. Through the analysis for mathematical model of PMSM in static coordinate system, extended electromotive force (EEMF) estimation which contains traditional back EMF and a kind of voltage related to the saliency of the motor was introduced based on the sliding mode current observer, the sliding mode observer was constructed to estimate the EEMF component in two-phase static coordinate system. Analyzed the reasons of the existence of chattering, Sigmoid function was used to reduce the chattering, instead of constant switching function. Using extended Luenberger observer to observe the position and velocity of the rotor. Simulation results were provided to verify its feasibility and effectiveness.
AC servo motor; sensorless control; sliding mode observer; extended Luenberger observer
國家重大科學儀器設備開發專項資助項目(2012YQ15008703)
TM 383.4+2
A
1673-6540(2015)04-0001-05