雙軸加速度計的汽車側翻預警電路設計*
2015-09-12 06:42:48周美麗白宗文
單片機與嵌入式系統應用 2015年8期
周美麗,白宗文
(延安大學 物理與電子信息學院,延安716000)
周美麗(講師)、白宗文(副教授),研究方向為數字圖像處理、電子系統設計。
引 言
隨著汽車保有量的增加以及汽車行駛速度的不斷提高,汽車的行駛安全性越來越受到關注,目前基于各類傳感器和信息處理系統的車輛運行姿態監測系統逐步應用于各類汽車當中,通過傳感器及時獲取車輛運動狀態并及時做出判斷是智能汽車的重要發展方向,其中汽車側翻預警是其中之一[1]。依據美國公路交通安全管理局(NHTSA)統計數據顯示,車輛側翻事故危害程度位居第二[2],僅次于車輛碰撞引起的事故。北美與歐洲交通事故統計結果顯示,汽車側翻占產生人身傷害交通事故比例的5%,是產生人員死亡的交通事故比例的20%。如何減少車輛行駛情況下的側翻已經成為汽車安全必須考慮的重要問題[3],因此,體積小、便攜式、成本低的汽車防側翻預警系統具有重要應用價值。
1 理論分析
引起汽車側翻的因素多,主要包括汽車機構、駕駛員和道路條件,近年來國內外學者和汽車廠商對整車抗側翻能力進行了廣泛研究[4],其中Jang yeol Yoon和KyongsuYi提出了基于傾角速度的來測量傾角動態相平面的分析方法[5-6],本文 采 用 參 考 文 獻[7]提 出 的 模 型,綜 合 考 慮懸架和輪胎形變等因素。
首先將汽車簡化為3個自由度:分別沿y軸的側向運動、繞z軸的橫擺運動和繞x的側傾運動。圖1為汽車側翻受力模型,Ms表示車廂,車廂的側傾導致質心偏移就會改變汽車自重的抗側翻能力,造成側翻閾值減小。
忽略車橋的質量,可得

當Fzlt=0時,汽車開始側傾,可得:

其中,φ=Rφac,ac為汽車開始側傾時所受的側向加速度,也稱為汽車側傾加速度閾值;h表示重心到地面的距離,hr表示側翻中心到地面的距離;t為兩輪間距;Rφ表示側翻剛度,取決于側傾角φ和側向加速度ac。當ac達到最大值時,汽車發生側翻,因此可以及時獲取φ和ac,若及時采取措施,則可預防汽車側翻。
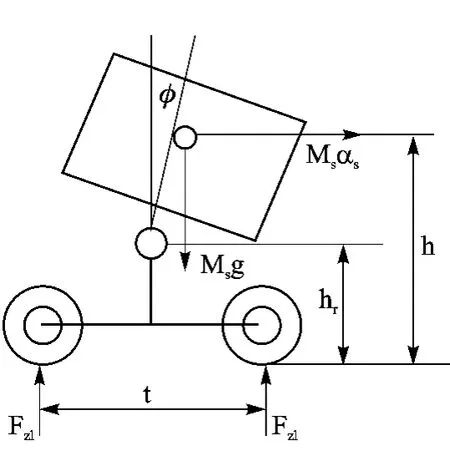
圖1 汽車側翻受力模型
2 系統設計
通過以上分析可知,汽車側翻主要由側向加速度、軸向加速度、輪距、重心到地面的高度等參數決定,則可分別實時測出這些參數,利用式(1)力學模型進行分析計算,預測汽車運行狀態。對于給定型號的小汽車,輪距和重心到地面的高度可視為已知條件,因此,只需要測量出側向加速度和軸向加速度就可以計算出汽車運行狀態。
本設計中加速度測量選用雙軸加速度計ADXL203[8-9],實時測量汽車軸向和縱向加速度。輪距、重心到地面高度、承載重量等固定參數,采用4×4薄膜鍵盤設置,微控制器采用MSP430F149,實時接收并處理以上輸入信息。為減少對駕駛員的干擾,在危險發生前,采用語音方式提示駕駛員采取相應措施。LCD 顯示屏選用彩色液晶顯示屏,完成用戶輸入交互。存儲器記錄一段時間汽車運行狀態,以便于用戶分析。電源電路、鍵盤電路和語音提示、LCD等模塊采用電子系統常見電路模塊,本文不再贅述。系統結構框圖如圖2所示。
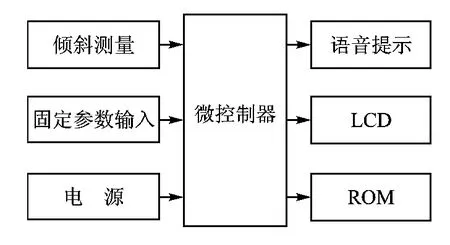
圖2 系統結構框圖
3 傾斜測量電路設計
傾斜測量電路是汽車防側翻預警電路的核心,需要高速、精確、實時處理汽車行駛姿態信號。傾斜測量電路如圖3所示,根據系統設計需要,采用ADI公司的雙軸加速度計ADXL203,它是一款多晶硅表面微加工傳感器,內部集成了信號調理電路,在汽車運動時X 軸或Y 軸方向的加速度可以動態地在器件Xout或Yout端輸出以相應的電壓信號。
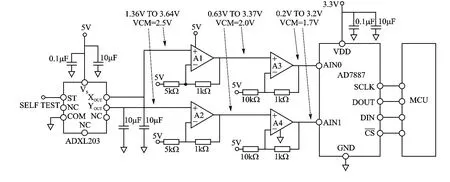
圖3 雙軸傾斜測量電路
加速度傳感器工作原理是使用重力作為輸入矢量來確定空間中物體的方向。該傳感器為表面微加工多晶硅結構,置于晶圓頂部,多晶硅彈簧懸掛于晶圓表面的結構之上,提供加速度力量阻力。
差分電容由獨立固定板和活動質量連接板組成,能對結構偏轉進行測量。固定板由180°反相方波驅動,加速度使梁偏轉,使差分電容失衡,從而使輸出方波的幅度與加速度成比例。然后,使用相敏解調技術來對信號進行整流并確定加速度的方向。
由于加速度傳感器輸出的電壓信號瞬變,因此需要選擇運行速度快、可以捕捉瞬變信號的高性能運算放大器。因此,本文選擇具有低失調電壓、低偏置電流、低噪聲的軌到軌輸入/輸出的AD8608四通道運放,實現信號調理,圖3中的A1~A4表示AD8608的4個通道。
信號采集與調理完成后需要進行數字化處理,然后輸入到微控制器進行處理,A/D 轉換的精度和速度為關鍵因素,為了處理加速度計輸出的數據并計算出角度,需確定ADXL203的輸出電壓范圍并將其與ADC輸入電壓范圍進行比較。
AD7887的輸入電壓范圍為0~3.3V,ADXL203的理想輸出電壓范圍為1.5~3.5V。故該電路選擇高速低功耗的12位SAR型A/D轉換器AD7887,其采樣率達到了125ksps,轉換工作頻率可達2.5 MHz。
本電路在傾斜度90°范圍內可達到0.01的精度,系統設計時全部采用低功耗、小封裝尺寸器件,因此本電路系統具有高精度、高性能、低成本、小尺寸的特征。
4 實驗與結果分析
如圖4所示,X軸上的重力矢量投影會產生輸出加速度,大小等于加速度計X 軸和水平面之間夾角的正弦值。水平面通常是與重力矢量正交的平面,當重力為理想值1g時,輸出加速度為:
則:
對于雙軸傾角,則可利用以下公式進行計算:

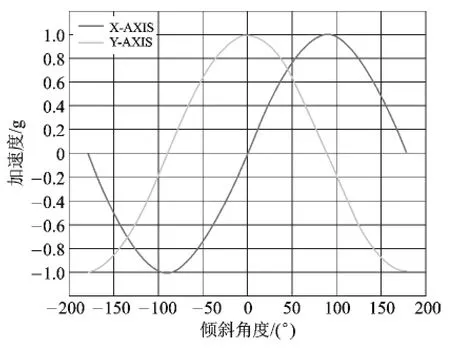
圖4 雙軸傾斜測量加速度與傾斜角度的關系
結 語
利用ADXL203雙軸加速度傳感器實時采集標識汽車運行狀態信號的X 軸輸出和X 軸輸出,并對信號經調理、轉換后傳送至微控制器,利用力學理論模型分析引起汽車側翻的各參數之間的關系,預判汽車側翻的可能性,并及時給出提示信息。
如表1所列,該系統角度測量范圍為-90°~90°,誤差范圍為-0.03°~0.03°,實現了高精度測量。
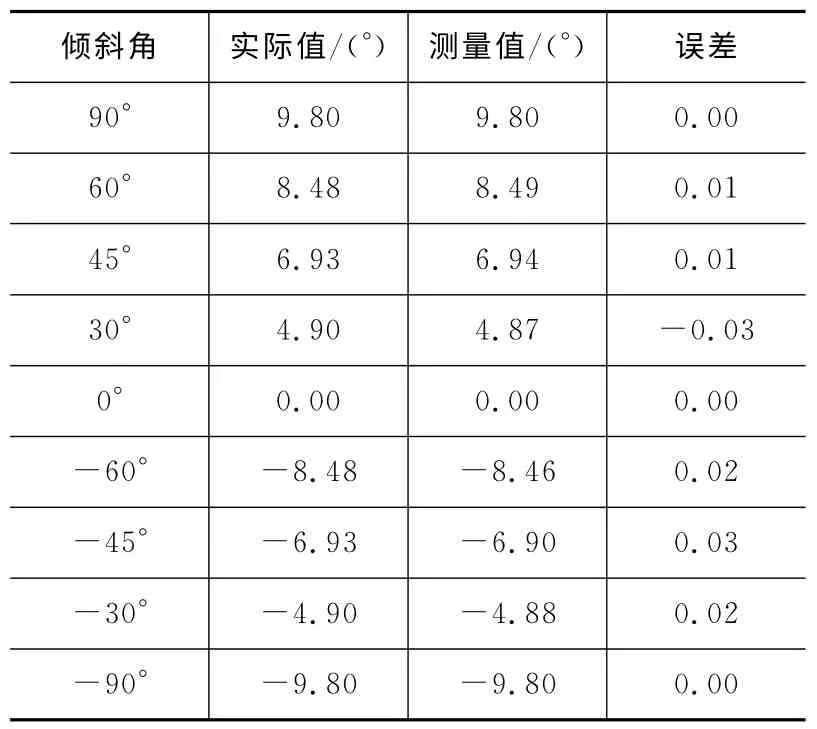
表1 測量數據
該系統具有寸小、功耗低、抗沖擊和振動性好的優點,且電路結構簡單,能精確測量轉動物體的偏轉角度,可廣泛應用于各種慣性測量系統,具有較高的應用價值。
[1]金智林,翁建生,胡海巖.汽車側翻預警及防側翻控制[J].動力學與控制學報,2007(10):365-368.
[2]趙嚴強,王思凡,楊志.汽車防側翻預警系統研究[J].產業與科技論壇,2011(14):68-69.
[3]岑達希,胡樹根.基于LTR 的汽車差動制動防側翻動力學研究[J].機電工程,2011(5):532-535.
[4]宋小文,李杰,王松.一種改進的汽車側翻模型及其應用研究[J].汽車工程,2009(10):971-975.
[5]Jangyeol Yoon,Kyongsu Yi.A Rollover Mitigation Control Scheme Based on Rollover Index[C]//Proceedings of the 2006American Control Conference,USA,2006.
[6]Aleksander Hac.Rollover Stability Index Including Effects of Sus-Pension Design[EB/OL].[2015-01].http://www.hindawi.com/journals/mpe/2013/750896/.
[7]李冬臨,林土勝.輪胎加速度傳感器的汽車制動性能監測分析[J].傳感器與微系統,2006(5):15-17.
[8]Chen Bo,Peng H.Rollover warning for articulated heavy verhicles based on a time rollover metric[J].Transaction of the ASME,2005,127(9):406-414.
[9]鹿麟,林凌.ADXL203 型雙軸加速度計在傾斜度測量中的應用[J].國外電子元器件,2007(7):62-64.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25