智能機器人研究初探
2015-09-16 00:42:29申耀武廣州南洋理工職業學院廣東廣州510925
機電工程技術 2015年6期
申耀武(廣州南洋理工職業學院,廣東廣州510925)
智能機器人研究初探
申耀武
(廣州南洋理工職業學院,廣東廣州510925)
智能機器人正逐漸廣泛且深入的影響著人類的生活形式。從智能機器人基本定義、發展沿革及智能機器人分類三個方面對智能機器人進行探析。
人工智能;智能機器人;發展沿革
0 引言
智能機器人的研發與其應用,早已吸引世人的目光與重視。許多先進國家的政府,如美、日、德、英與歐盟國家等,更不斷地投入大量的科研經費與人才培育。美國微軟總裁比爾·蓋茨曾預測“在2025年前每個家庭內都會有機器人”。廣泛定義的智能型機器人和相關智能型機器人技術未來很可能成為全球最大規模產業,智能型機器人和相關技術將徹底改變你我未來的生活。
1 智能機器人基本定義
智能機器人是具有人工智能的機器人,捷克著名作家Karel Capek于1920年的劇作《Rossums universal robots》里創造了“Robot”這個名詞來描述工廠里的奴隸,Robot中文翻譯為機器人,“機器人”中雖然有一個“人”字,但Robot本身其實跟人類并沒有特別連結的意義,只是Robot最初因緣際會被翻譯成機器人后就沿用至今。牛津字典將Robot解釋為“一部機器,它可在電腦控制下或全自動執行一些人類可以辦到的工作”[1]。英文版維基百科將Robot定義為“一種機器或虛擬人工個體,通常是一部由電腦程式或電路指揮的電機機器”。所以說,機器人的外形并不限定為人類形狀,它也可以具備其他動物形狀、植物形狀、自然界存在的物體形狀或任何人造形狀。機器人基本上只是一種電整合裝置,并具備一定的程序規劃后自動執行指定功能或動作的能力,通常包含結構、機構、感測單元、動力單元、控制單元、通訊單元和計算單元等要素[2]。
2 智能機器人發展沿革
1927年,世界上第一部真正的機器人“Tel?evox的人形機器人”在美國被建造出來,如圖1所示,可藉由電源線、無線通訊和電話線來進行遠端控制儀器的操作。
1942年6月,維拉德·波拉德取得一件由電力控制系統與機械手組成的噴漆器美國專利,這是一件具產業應用價值的并聯機器人,如圖2所示。
1948年,英國機器人技術先驅——威廉格雷沃爾特發明了機器人埃爾默與埃爾西,如圖3所示,以非常簡單的電子設備來模擬栩栩如生的行為。

圖1 Televox人形機器人
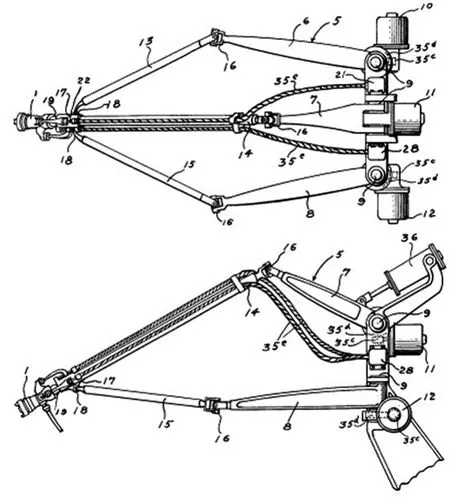
圖2 第一個三維的工業并聯機器人

圖3 埃爾西機器人
1950年阿蘭·圖靈所出版的《計算機械與智能》中,提著一個稱為“圖靈測試”的測試方法,可以來確認機器是否有思考能力。
1954年,喬治迪沃爾和卓·英格列柏格設計出第一臺可編程的機械手臂——Unimate,如圖4所示,并隨后在1962年演化成為第一臺工業機器人,在通用汽車公司的裝配線上執行危險及重復性的工作。

圖4 Unimate機器人
1959年麻省理工學院的伺服系統實驗室展示了先進的電腦輔助制造技術,應用由該校自動編譯工具專案創造的語言APT,1963年,斯坦福大學也緊接著創造了第一批可由電腦控制的人造手臂——Ranchoarm,如圖5所示。
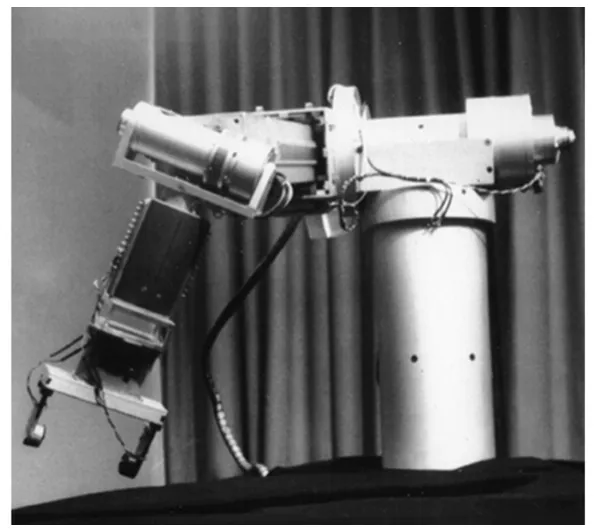
圖5 Rancho Arm
1969年斯坦福大學人工智能實驗室的機械系學——維克多許維門制造出了Stanford arm,如圖6所示,此手臂的設計后來演變成一個機器手臂設計標準,至今仍影響現代的機械手臂設計準則。

圖6 Stanford Arm
1970年,蘇聯成功將月球表面探索車“月球車一號”登陸在月球上,如圖7所示,是第一部可藉由遠程控制技術,在莫斯科即時引導在月球表面運動的機器人。

圖7 月球車一號

圖8 Puma工業機器人
1974年3月,沙因曼教授設計出采用微型計算機來控制的機械手臂,并采用小零件裝配和觸控壓力傳感器的反饋設計。1978年,Unimation公司生產了世界上第一臺工業機器人Puma,如圖8所示,可編程后自動進行一般性裝配任務,并使用于通用汽車公司。這部性能卓越的工業機器人在很多年后仍在許多研究實驗室中使用。
1981年,塔卡歐·卡納內開發出世界上第一個“直接驅動機械手臂”,讓機械手臂更快和更準確。1986年本田公司推出僅有雙足的第一部人形機器人E0,用來驗證雙足行走理論,如圖9所示,最早的原型機,必須花5秒才能走一步,且只能走直線。

圖9 最早人形機器人
1992年,約翰·阿德勒博士提出了“電腦刀”的創新概念,也是后來外科機器人的始祖。電腦刀是一部機器,可先用X光觀察病人的腫瘤,并在發現腫瘤時施加一個預先算好劑量的輻射。1994年,卡內基·美隆大學的八足行走機器人“但丁2號”成功地下降到斯波爾山火山口內收集火山氣體樣品,如圖10所示。

圖10 但丁2號
1996年麻省理工學院的大衛·巴雷特設計了一部模擬真魚運動方式的機械鮪魚,如圖11所示,希望讓未來的機器潛艇具備鮪魚游泳方式的高效率。

圖11 機械鮪魚
1997年,美國國家航空航天局成功執行火星探路任務,將“旅居者”探測車送上火星表面,并在后來的兩個月期間繼續傳回從火星表面收集的數據,如圖12所示。
1999年,SONY公司發布第一個量產版本的AIBO機器狗,如圖13所示,具有學習、娛樂和與主人溝通的能力,后來幾年陸續推出幾版更高規格的機器狗。
2000年,本田公司首次亮相一部非常近似人類的ASIMO人形機器人,如圖14所示。ASIMO重量輕,且具有精良的步行技術,有充分的自由度,可同時操作雙臂和雙足來執行動作,其優美的外形和逼真擬人化的動作很快地風靡全世界。

圖12 旅居者探測車

圖13 AIBO機器狗

圖14 ASIMO人形機器人
2002年,麻省理工學院的李奧納多機器人,如圖15所示,被設計來協助機器人和人互動和合作的研究,該項目的目標之一是使未受過訓練的人們有可能與機器人進行互動并更快速地教導機器人。

圖15 李奧納多機器人
2004年,愛普生公司發表當時全球最小機器人,如圖16所示,僅7厘米高,重10克。此直升機機器人可使用裝載的攝影機到發生自然災害的現場上空搜集資料。

圖16 愛普生最小飛行機器人
2005年,波士頓動力公司開發了一部大狗機器人,如圖17所示,因為卓越的動態平衡控制技術和配備了戰斗機等級的高速反應加速度計,大狗機器人具備了絕佳的動態平衡能力,可不受地形限制,背負重物和補給。

圖17 大狗機器人
2007年,迪安·卡門研發了可由頭腦控制動作的機械義肢手臂,如圖18所示,這種具備精密機械設計的機械義肢已經被很多截肢者使用。

圖18 機器義肢
2009年,日本研究機構——國家先進工業科學和技術研究所推出HRP-4C女性人形機器人,如圖19所示,具有一顆仿真人臉機器頭,希望雙足人型機器人可以藉由具備人類的外觀而被人類社會接受。
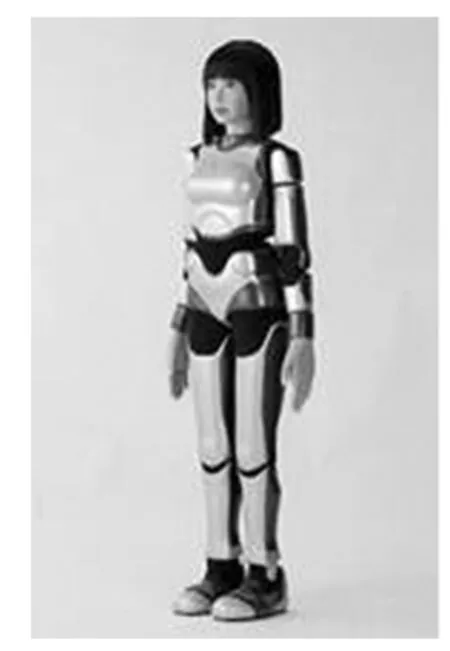
圖19 HRP-4C機器人
2010年,Google公司開發出無人駕駛車,美國內華達州立法通過,2012年5月開始正式允許無人駕駛車在道路上駕駛。Google已拿到第一張無人駕駛車執照。
2012年,美國國家航空航天局開發了好奇號火星探測車,如圖20所示,好奇號已實際登陸火星上的“蓋爾撞擊坑”內,通過地球發射到火星的無線電信號控制下,進行鏟土、清理、采集及分析沙坑內部地質樣本等工作。

圖20 好奇號探測車
3 智能機器人分類
智能機器人的種類非常多,本文依據功能或型態分別介紹幾種較常看到的智能型機器人[3-5]。
(1)機械手臂或工業機器人
機械手臂或工業機器人被使用在許多制造場合上,形式有很多種,常被使用的是多關節式機械手臂和直角坐標系機械手臂。機械手臂具備的自由度不一,從最簡單的單軸機械手臂到復雜的7軸關節式機械手臂。機械手臂或工業機器人的成本頗高,但因具備高精準度、高可靠度、高耐用度等三高特質,普遍用到汽車工廠包括半導體廠和LCD廠等大型電子資訊產業工廠。
(2)人形機器人
人形機器人具備人類的形狀,通常具有頭、身軀、雙臂和雙腿,但是也有一些人形機器人僅具備腰部以上的結構,腰部以下從缺或以輪型移動平臺取代雙足。人形機器人的研究以日本為主要發展國家,但最近幾年,美國、法國等許多國家也在人形機器人的研究上有很好的成果。人形機器人的最大優勢應該是跟人類外形相似,最容易被接受在與人共處的環境內執行與人互動等一類原本人類執行的工作。
(3)家庭機器人
家庭機器人是泛指使用在家庭并替人類提供各式服務的機器人。家庭機器人目前包括吸塵機器人、拖地機器人、除草機器人、清潔游泳池機器人、監視保全機器人、教育娛樂機器人、伴侶機器人等。未來將有更多提供各式功能的家庭機器人進入家庭。吸塵機器人因為它的性價比高,雖然功能有限,但可以實際協助人類執行部分清潔工作而受到青睞,已成為除機械手臂外被人類實際使用數目最多的一種機器人。
(4)軍用機器人
軍用機器人是指被用來執行跟國防或軍事相關任務的機器人。最早在第二次世界大戰中,德國就發展出可遙控的移動型炸彈/地雷機器,蘇聯也發展出遠端控制無人戰車。后來這種類型的機器人延伸到包括炸彈處置機器人、運輸機器人、搜索和戰斗機器人、無人偵察機、無人攻擊機等。軍用機器人領域目前的最大發展領域為無人駕駛戰斗機和無人駕駛轟炸機。
(5)娛樂和教育機器人
娛樂機器人是指用來與人互動,提供人類各式樂趣的機器人。教育機器人則藉機器人與人互動功能教導人類,特別是小孩們,學習某些特定知識。這類別娛樂和教育機器人也能直接讓某些人類受惠,且價格合宜,因此較容易進入市場,但是如果功能無法持續擴充,要長期被社會接受將是嚴格挑戰。北京紫光優藍機器人公司于2001年推出愛樂優家庭親子機器人,成為全球第一部成功進入家庭的教育娛樂機器人。
(6)太空機器人
太空機器人指的是被使用在外太空的各式機器人,主要功能包括勘探、搬運、收集和檢修維護等功能。已被人類使用的太空機器人包含被美國、中國和歐盟送往月球和火星表面收集資料的多部勘探機器人,在太空梭上執行搬運貨物的遙控機械手臂系統和在太空站內使用的各式機器人。2012年8月美國的探勘機器人“好奇號”成功地從火星表面傳回振奮人心的清晰影像,未來也將在火星表面持續地收集情報的工作[5]。
(7)遠端操控機器人
遠端操控機器人主要指可由人類在機器人現場以外,藉由無線通信、網絡或衛星通訊等方式指揮以執行特定任務的機器人。遠端操控機器人的兩個主要元素是“遠端操作”和“遠端親臨現場”。許多遠端操控機器人被用來處理威脅或緊急事故區域內人類不適合在場但必須解決的問題,如日本核能發電廠因海嘯發生的核泄漏事故后,一些遠端操控機器人就被遣送入發電廠內高危險區域處理緊急事故。
(8)醫療機器人
醫療機器人使用在醫療、檢驗、醫療型陪伴和訓練醫療相關技術等場合,包括可用來執行外科手術的達文西機器人、利用模擬人體回饋資訊來訓練醫師和護士的訓練機器人、可陪伴孤獨或失憶老人和自閉癥兒童,并與其互動的撫慰機器人、幫無法自行進食病人喂食的喂食機器人、可在遠端醫師指揮下即時移動到病房以視頻跟病人或護士對談問診的遠距看診機器人和可輕易置入人體進行體內檢測工作的微小檢測機器人等。人類社會老齡化問題日趨嚴重,醫療機器人已成為許多先進國家發展智能型機器人的重點項目。
(9)柔性機器人
柔性機器人是指一部機器人的整體或部分具有柔軟的外表或身體,用來模擬生物的特性,以利執行特定任務的目標,是機器人仿生學中一個重要的研究領域。典型柔性機器人范例的機器章魚,整個身體和觸須都由軟性材料構成,柔性機器人可藉由柔軟的外表和身軀,執行一般剛性機器人無法完成的工作。
(10)群組機器人
群組機器人是指一群具有相同功能和架構的機器人,類似群居動物的蜜蜂、螞蟻或遷移的鳥群般,以多數機器人協同行動的特性達成特定任務。每一個個體機器人相對架構簡單,因此個體機器人的任務清楚簡單,但如何協同指揮和操控大數量的個體機器人以期獲得最大整體利益,則是一件非常困難和復雜的任務。目前群組機器人還是以理論的發展為主,較具潛力的使用場合仍是以軍事用途為主。
(11)納米機器人
納米機器人是指超微小機器人,其尺寸是以10-9m為計算單位,伴隨著醫學科技的進步和老齡化社會帶來的商機,已成為一項新型機器人領域。研究學者希望未來能制作出像細菌或病毒大小的納米機器人,能被輕易地送入人體特定部位執行如消滅細菌和病毒、修復細胞或修正體內組織等各種微觀任務。
(12)模塊化機器人
模塊化機器人主要架構是由多個具有相同功能和構造的模塊,以特定組合方式所組成。當這些模塊重新改變其組成方式,形成另一種新結構外形或新型態時,也可能構成另一部具有相同或不同功能的模塊化機器人。許多學者已研發出可自行改變機器人型態的模塊化機器人,這些機器人可主動根據環境或任務的需求,重新調整模塊型態,以不同的模塊連接方式組成一部新機器人,以利自我修復或成功執行任務。
4 結論
現代社會,人們的工作幾乎都有電腦的參與,而智能機器人是電腦升級版的應用,機器人技術在引領著一場新的技術革命,智能機器人是社會發展的必然產物,而且如大浪滔滔,勢不可擋。
[1](德)Hendrik Skubch著,連曉峰譯.自主移動機器人行為建模與控制[M].北京:機械工業出版社,2014.
[2](美)Roland Siegwart,(美)Illah R.Nourbakhsh,(美)Davide Scaramuzza著,李人厚,宋青松譯.自主移動機器人導論[M].西安:西安交通大學出版社,2013.
[3]樸松昊,鐘秋波,劉亞奇,等.智能機器人[M].哈爾濱:哈爾濱工業大學出版社,2012.
[4]GCtronic.(2012).EPFL educationaland researchmini mobile robot[EB/OL].http://www.gctronic.com/ e-puck.php.
[5]NASA.(2012).Mars Science Laboratory[EB/OL]. http://www.nasa.gov/mission_pages/msl/news/ msl20120803.html.
(編輯:阮毅)
Intelligent Robot Research Study
SHEN Yao-wu
(Guangzhou Nanyang College,Guangzhou510925,China)
Intelligent robots are gradually widely and deeply affecthuman life forms,this paper from the basic definition,the evolution and developmentof the intelligent robotand intelligent robotclassification threeaspects to carry on analysis to the intelligent robot.
artificial intelligence;intelligent robot;evolution
TP242
A
1009-9492(2015)06-0047-05
10.3969/j.issn.1009-9492.2015.06.011
2014-12-12
申耀武,男,1979年生,山西晉中人,碩士,講師。研究領域:機電一體化技術。
猜你喜歡
大科技·百科新說(2021年6期)2021-09-12 02:37:27
好孩子畫報(2020年5期)2020-06-27 14:08:05
當代工人(2020年8期)2020-05-25 09:07:38
意林·全彩Color(2019年6期)2019-07-24 08:13:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
