面向在軌測量任務的伴飛機器人三維仿真系統
2015-09-21 01:41:12吳劍威崔繼文史士財譚久彬
哈爾濱工業大學學報 2015年2期
吳劍威,崔繼文,史士財,譚久彬
(1.哈爾濱工業大學超精密光電儀器工程研究所,150080哈爾濱;2.機器人技術與系統國家重點實驗室(哈爾濱工業大學),150080哈爾濱)
隨著空間技術的不斷發展,對于未來航天器長壽命周期和高可靠性的要求將越發趨于嚴格.為保證航天器在復雜的空間環境中運行更加持久穩定,在軌檢測目前已成為航天器故障診斷與威脅警告的關鍵技術手段.同時,在空間組裝、系統升級和后勤支持等領域中,在軌檢測技術也具有非常廣泛的需求[1].美國的多項研究計劃如 XSS 計劃[2]、MiniAERCam計劃[3]等都促進了在軌檢測領域相關技術的發展.由于空間機器人在軌具有良好的機動性,并往往搭載帶有傳感器的多自由度機械臂系統,因此可作為待測航天器貼近與伴飛的新型檢測平臺,利用機械手攜帶的多種非接觸傳感器,如電磁檢測傳感器等,通過專門設計空間伴飛機器人的測量軌跡,可實現安全、可行、有效的近距離檢測,獲得特定的檢測結果.根據檢測任務需求,空間機械臂在軌檢測過程主要包括如下4個過程:1)空間機器人系統飛行接近航天器使空間機械臂貼近待測航天器表面;2)機械臂跟蹤檢測軌跡并進行航天器待測表面的測量;3)完成測量任務,機械臂停靠;4)載體姿態的重穩定.為了節約能源、避免碰撞,機械臂在跟蹤檢測軌跡的過程中通常需要關閉載體的姿控系統使載體處于自由漂浮狀態.
目前很多學者對自由漂浮空間機器人末端軌跡規劃方法進行了相關研究,如文獻[4-9],這些文獻中對于軌跡規劃方法中數學模型都是建立在簡單連桿機構基礎上的,方法的仿真驗證也都是采用不直觀的數值曲線仿真.而對于實際在軌檢測的空間伴飛機器人系統,機械臂每一個連桿都具有復雜的結構,并不是簡單連桿所能表示的.當機械臂末端探測器跟蹤上述方法所規劃的測量軌跡時,很可能造成臂桿之間或機械臂與載體之間發生碰撞.因此在機械臂所規劃的運動執行之前必須利用三維圖形仿真驗證以保證機械臂的安全工作.另外利用三維圖形仿真還可以對新提出的軌跡規劃算法進行可行性驗證,與單純的數值仿真相比,仿真結果更加直觀.本文基于虛擬現實方法,提出一種高真實感空間機器人三維仿真系統,該系統可實現仿真數據與虛擬環境實時交互等多種操作.
1 基于虛擬現實技術的伴飛機器人模型建立
虛擬現實技術是一種可以創建和體驗虛擬世界的計算機仿真系統[10].該技術是三維仿真領域的一個重要發展趨勢,其中包含了多媒體技術、傳感器設備、網絡、人機接口技術、仿真技術及電腦圖形設計等多個前沿技術領域,這種多個技術領域交互配合的前沿技術領域是很具有挑戰性的.在機器人研究領域中虛擬現實技術通常應用于空間機器人的遙操作系統[11].本文空間機器人三維仿真平臺的開發就是基于虛擬現實技術,依靠計算機系統生成的一種模擬環境.
1.1 三維實體幾何模型建立
三維仿真實體的整個建模過程總體來說就是對其進行詳細的數學分析描述,盡量把實體信息化和數字化,這樣有益于計算機程序讀取分析,然后由處理器創建一個盡量貼近實體的虛擬幾何模型.詳細來講此過程可分為實體建模、框架搭建、表面處理這3種不同細致程度的類型[12].其中實體建模更符合計算機平臺的需求.由于該模型是真實物體具體的計算機數字描述,因此能由內到外的表現出原實體形狀,進而解決了三維實體現實感官的二維顯示問題.本文以實體建模軟件對空間機器人系統進行實體建模,見圖1.該模型為串聯機器人運動連桿結構,可以劃分為7個模塊.包括1個載體模塊、3個雙關節模塊(連桿1、連桿3、連桿5)、兩個臂桿模塊(連桿2、連桿3),1個末端探測器模塊.
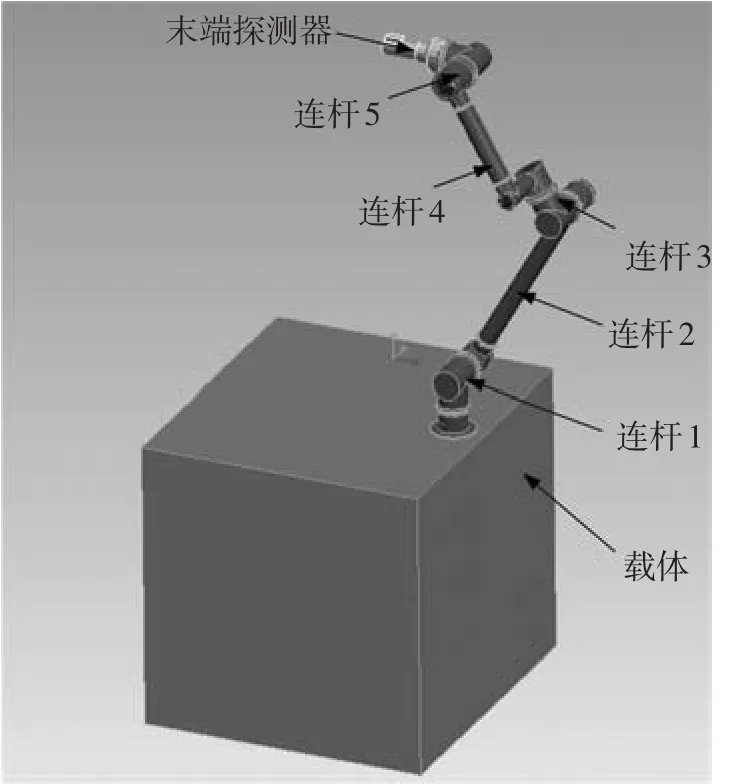
圖1 空間伴飛機器人實體建模
1.2 定位模塊建模
機械臂圖形仿真系統的設計中單單能實現高仿真視覺效果是遠遠不夠的,必須還要具有實體的運動功能.在Open Inventor標準的動態虛擬仿真場景設計中,機械臂的運動是根據一系列數字化指令所產生的,而指令需要借助坐標系作為參考來實現.因此每個需要活動的實體都要有一個相應的參考點,否則運動指令不會有效.為了建立與實體運動相關的坐標系,通常采用的方法是在機械臂的旋轉軸位置處引入一個定位模塊.根據定位模塊,使得仿真系統可以拾取運動部件參考系,從而通過指令驅動實體產生運動.定位模塊雖然不是機械臂零部件,但卻是必需的,一般都是軸對稱或者中心對稱的幾何實體.
仿真系統設計的定位模塊見圖2.該定位模塊只能是通過拉伸創建實體特征.雖然從幾何的角度看,旋轉特征也能夠建立對稱實體,但是在Open Inventor環境下系統無法識別旋轉特征的中心軸,從而無法建立相應的坐標系.
1.3 仿真平臺三維場景的建立
將建立的三維實體幾何模型導入Open Inventor構建的虛擬場景中,完成機器人系統邏輯位置的組裝,其邏輯結構見圖3.虛擬現實場景中,各實體模塊邏輯位置的確定也可以說是創建場景所有基本節點的過程.本系統中每個節點分別對應機械臂的一個零部件(包括定位部件),整體來說都是上層節點管理下層節點,而定位部件的運動坐標的參考點的確定和變換也是由這種分隔符群組節點來決定.由上述邏輯關系建立的三維仿真場景見圖4.
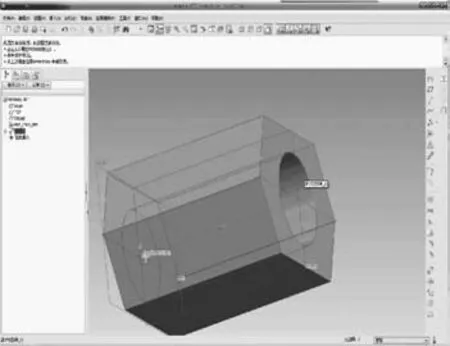
圖2 定位模塊建模
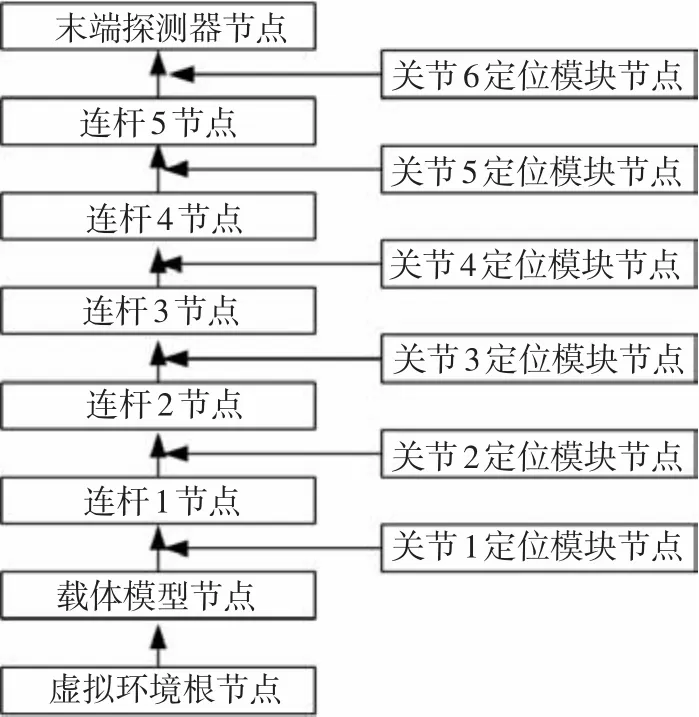
圖3 虛擬環境中機械臂組裝的邏輯結構

圖4 基于虛擬現實技術的空間伴飛機器人三維仿真場景
1.4 自由漂浮空間機器人運動學建模
圖5為自由漂浮空間機械臂一般模型,其中n自由度的機械臂和機械臂自身的載體航天器構成了整個平臺.該系統由n+1個剛體桿組件構成.其中桿件0表示空間機器人的載體,轉動關節i+1連接第i和第i+1個桿件.
由空間機器人的一般模型可知,機械臂各桿件質心和機械臂末端的位置矢量可以分別為
式中:ai為從關節i指向桿件i質心的位置矢量,ai∈R3;bi為從桿件i質心指向關節i+1的位置矢量,bi∈R3.
由此微分可得各桿件質心線速度為

式中:v0為載體質心的線速度矢量,v0∈R3;ω0為載體質心的角速度矢量,ω0∈R3;θ為關節i的旋轉角度,θ∈Rn;k為關節i旋轉方向的單位矢量.
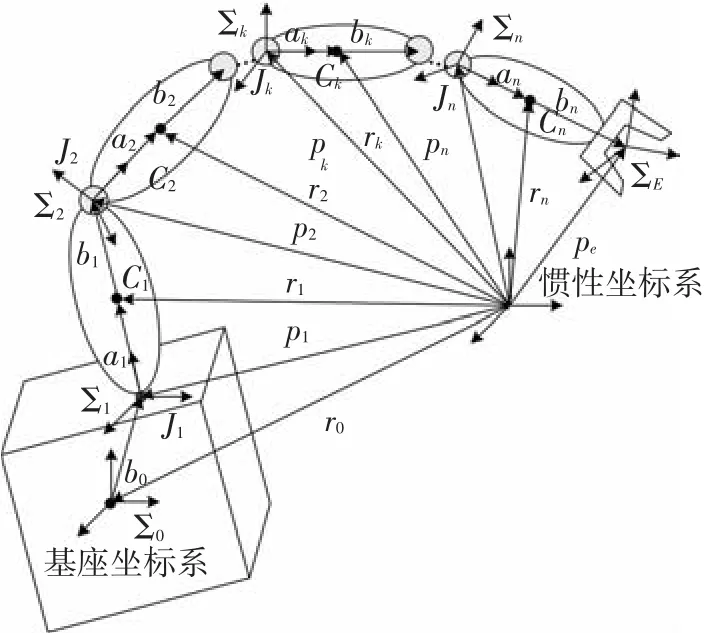
圖5 漂浮基空間機械臂的一般模型
機械臂末端的線速度為
各桿件質心角速度為


機械臂末端姿態的角速度為將式(4)和式(6)寫成矩陣形式,有
式(7)為空間機器人的運動學方程.其中Js為與載體運動有關聯的雅可比矩陣;Jsv,Jsω分別為Js關于載體速度和角速度的分塊矩陣;E為單位矩陣;0m×n為m×n的零矩陣.其中定義向量r=[x,y,z]的操作m可表達為而Jm為與機械臂運動相關的雅可比矩陣,
Jmv、Jmω分別為Jm關于速度和角速度的分塊矩陣.
Jm與地面固定基座機器人雅可比矩陣相同,Jm可表達為
2 仿真平臺數據傳輸與存儲模塊設計
仿真系統的通信程序采用消息機制的異步套接字阻塞與非阻塞的工作方式作為底層接口,然后按照客戶端模式進行開發.如果把阻塞工作模式應用于機械臂三維仿真平臺中,那么在實現I/O操作前,執行數據傳輸操作的通信模塊不會立刻把程序運行的結果返回調用進程或者是主線進程,從而使得上層程序得到控制權,而是從始至終在進程中運行直到網絡上實時仿真數據出來.例如,在客戶端上接收網絡傳遞的數據時,通常情況下程序常常采用的recv函數傳遞往來的數據.如果經過一段時間后,數據包仍沒有通過網絡傳遞過來,那么該客戶端中的上層程序就會一直阻塞在該函數的進程中,其他模塊的程序也將不會繼續執行,該客戶端的主線程也將會被暫停運行.不止如此,在許多情況下使用阻塞工作方式也將會影響網絡通信的性能.如果采用Winsock函數的客戶端在非阻塞工作模式下工作,不管網絡狀態如何,程序往往都立即檢測并把數據傳遞的狀態返回.另外,在采用Winsock函數傳遞時,不僅僅可以獲得操作結果的通知,也可以通過該通知檢驗數據傳遞的正確性.
本文所建立的空間機器人三維仿真平臺網絡通信程序采用非阻塞工作方式,如圖6所示.綜合運用了消息傳遞與異步套接字響應機制所需具有的網絡事件篩選功能,注冊一些FD-WRITE、FDREAD、FD-CLOSE FD-ACCEPT等常用的網絡事件,利用多線程技術盡可能減少阻塞的可能性.
另外,三維仿真系統設計了本地文件存儲模塊.該模塊主要用于離線作業和在線實時仿真運算的存儲、輸出、交流演示等.存儲文件以文本文件保存.每次進行數據存儲時,文本文件以追加的方式打開.如果是第一次存儲或者原存儲文件已刪除,則重新創建存儲文件.

圖6 虛擬現實三維仿真平臺的網絡通信客戶端模塊
3 系統仿真
仿真的任務是對機械臂末端探測器跟蹤圓軌跡進行三維虛擬現實仿真.這是空間檢測機器人的一種常規任務.
對于空間機器人圓弧軌跡的跟蹤,需要規劃末端的速度.定義圓弧軌跡的圓心坐標系為{Ⅰc},其原點定義在圓心處,圓弧軌跡位于坐標系{Ⅰc}的x,y軸所在平面內.{Ⅰc}到慣性坐標系的旋轉矩陣為Tc.規劃軌跡的圓周角隨時間變化函數為θc(t),如果機械臂末端跟蹤軌跡為一個閉合的圓軌跡,則邊界條件應滿足

為了滿足跟蹤軌跡的平滑性,·θc(t)也采用梯形規劃.空間機械臂末端線速度為位置pe的微分pe,位置矢量為
式中:rc為圓軌跡的半徑.
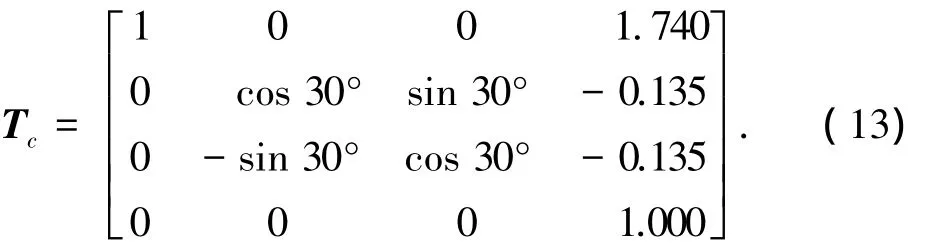
機械臂末端的初始笛卡爾位姿為(2.18,-0.15,0.88,-3.09,-0.52,-2.95),初始關節角為(175°,-40°,-120°,0°,240°,5°).在跟蹤的過程中令機械臂末端的姿態保持不變,圓軌跡半徑rc=0.35 m,圓心坐標系到慣性系的轉移矩陣為
因此將末端速度pe代入1.3節的運動學模型,可規劃出空間伴飛機器人末端探測器跟蹤上述圓軌跡時機械臂各關節的角位移,如圖7所示.
上述機器人運動規劃的虛擬現實三維模擬仿真如圖8所示,根據該的仿真結果可以方便地看出當機械臂末端探測器實現從初始位置跟蹤封閉的圓軌跡直到回到初始位置的運動后,其載體的位置和姿態并沒有回到初始狀態,也就是說載體的位置與姿態與機械臂末端位置沒有關系,而與機械臂運動的歷史有關,即呈現出典型的非完整特性[13].根據該仿真結果,可使研發人員在空間伴飛機器人的圓測量軌跡設計、仿真中對機械臂實際工作狀態(如軌跡跟蹤、載體姿態變化等)得出更為直觀的結果.
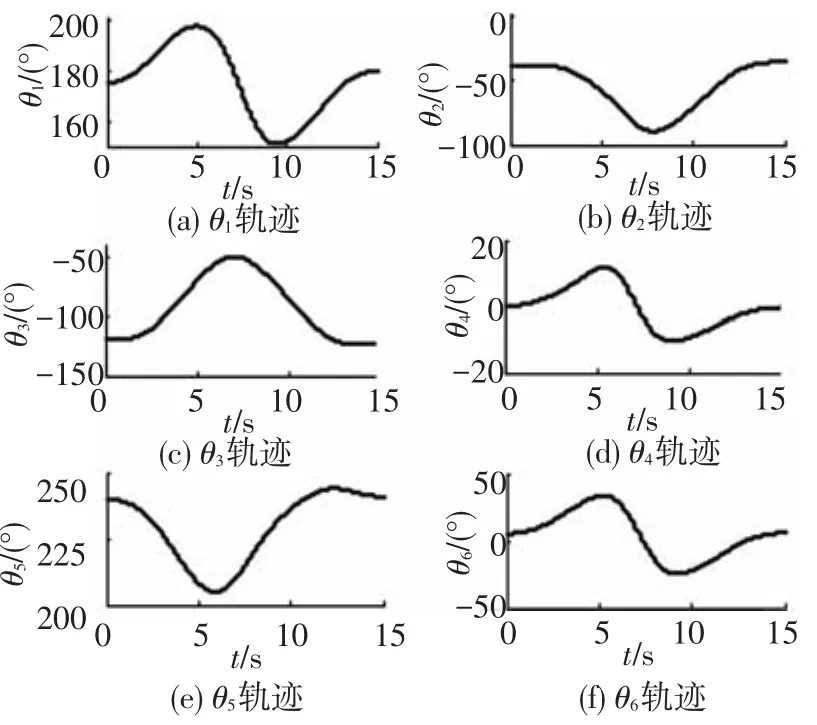
圖7 末端探測器跟蹤圓軌跡時機械臂各關節的角位移
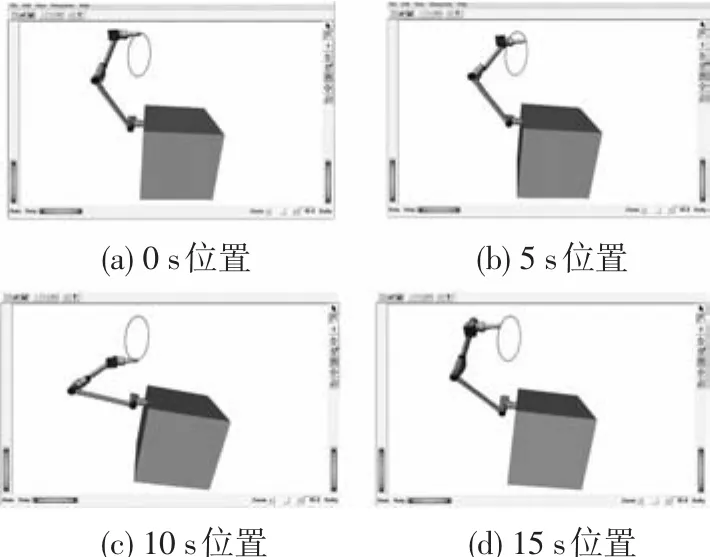
圖8 空間伴飛機器人對圓測量軌跡跟蹤的仿真
4 結 論
1)基于虛擬現實技術,建立了空間伴飛機器人三維實體模型,并針對模型的運動坐標系建立了模型的定位模塊,構建了仿真平臺的三維場景.該仿真系統可實現空間伴飛機器人在軌測量的可視化仿真.
2)建立了三維仿真系統的數據傳輸與文件存取模塊,實現在線或離線仿真時,仿真數據與圖形界面的實時交互.
3)基于空間機器人運動學模型對空間伴飛機器人跟蹤圓軌跡進行軌跡規劃,并利用本文建立的三維仿真系統對該軌跡規劃進行了仿真.通過仿真可以直觀地得到空間伴飛機器人跟蹤圓軌跡時的運動規律,驗證了三維仿真系統的有效性.
[1]史建偉,蔡遠文,李巖.在軌檢測研究綜述[J].兵工自動化,2011,30(6):59-62,83.
[2]MADISON R W.Micro-satellitebased, on-orbit servicing work at the air force research[C]//Aerospace Conference Proceedings.Big Sky, Montana:IEEE,2000:215-225.
[3]FREDRICKSON S E,DURAN S,MITCHELL J D.MiniAERCam inspection robot for human space missions[C]//Space 2004 Conference and Exhibit.San Diego,California:IEEE,2004.
[4]ZARAFSHAN P,ALI S,MOOSAVIAN A.Dynamics modelling and hybrid suppression control of space robots performing cooperative object manipulation [J].Communi-cations in Nonlinear Science and Numerical Simulation,2013,18(10):2807-2824.
[5]AMIT K,PUSHPARAJ M P,SUKAVANAMA N.Trajectory control of a two DOF rigid-flexible space robot by a virtual space vehicle[J].Robotics and Autonomous Systems,2013,61(5):473-482.
[6]TORTOPIDIS I,PAPADOPOULOS E.On point-to-point motion planning for underactuated space manipulator systems[J].Robotics and Autonomous Systems,2007,55(2):122-131.
[7]HU Xiaoping,ZUO Fuyong.Research and simulation of robot trajectory planning in joint space[J].Applied Mechanics and Materials,2012,103:372-377.
[8]KANDIL A A,BADREDDIN E.A new method for direct and point-to-point robot trajectory planning in narrow spaces[C]//IEEE International Conference on Control Applications/International Symposium on Intelligent Control.St Petersburg,Russia:IEEE,2009:1738-1743.
[9]徐文富,強文義,李成,等.自由漂浮空間機器人路徑規劃研究進展[J].哈爾濱工業大學學報,2009,41(11):1-12.
[10]鄒湘軍,孫健,何漢武,等.虛擬現實技術的演變發展與展望[J].系統仿真學報,2004,16(9):1905-1909.
[11]胡海鷹,李家煒,王濱,等.虛擬現實技術在機器人臂/靈巧手遙操作中的應用[J].系統仿真學報,2004,16(10):2305-2308.
[12]KANG K,TAREL J,FISHMANET R,et al.A linear dual-space approach to 3D surface reeonstruction from occluding contoursusing algebraic surface[C]//Proceedings of International Conference on Computer Vision(ICCV).Vancouver,BC,Canada:IEEE,2009:356-364.
[13]NAKAMURA Y,MUKHERJEE R.Nonholonomic path planning of space robots via a bidirectional approach[J].IEEE Transactions on Robotics and Automation,1991,7(4):500-514.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09