基于慣性傳感器的混凝土泵車臂架實時姿態檢測方法研究
2015-09-27 09:24:08游海濤楊兆萬尹棟周艷紅楊輝華
現代計算機 2015年26期
關鍵詞:檢測
游海濤,楊兆萬,尹棟,周艷紅,楊輝華
(1.桂林電子科技大學電子工程與自動化學院,桂林 541004;2.武漢地和智能有限公司,武漢 430074;3.華中科技大學生命科學學院,武漢 430074)
基于慣性傳感器的混凝土泵車臂架實時姿態檢測方法研究
游海濤1,楊兆萬2,尹棟2,周艷紅3,楊輝華1
(1.桂林電子科技大學電子工程與自動化學院,桂林541004;2.武漢地和智能有限公司,武漢430074;3.華中科技大學生命科學學院,武漢430074)
0 引言
混凝土泵車是將混凝土泵安裝在汽車底盤上或專用車輛上,將混凝土的輸送和澆灌工序綜合在一起的工程車輛,節省了時間和勞動力,減輕勞動強度,保證了施工質量,減少成品混凝土的消耗[1]。目前市場常用泵車臂架一般由4臂節至6臂節組成,工作時臂架部分伸展較大,在力學上屬懸臂梁結構,受力比較復雜[2]。實際工況下,臂架因混凝土泵的沖擊而產生大量振動,使臂架結構尤其是臂架焊縫產生疲勞破壞,同時威脅施工安全。為克服振動問題,現有技術中一般通過主動減振的方式避免可能產生的安全風險,減振的核心技術之一即在于準確、實時地檢測出臂架的位置與振動狀態。混凝土泵車臂架模型如圖1所示。
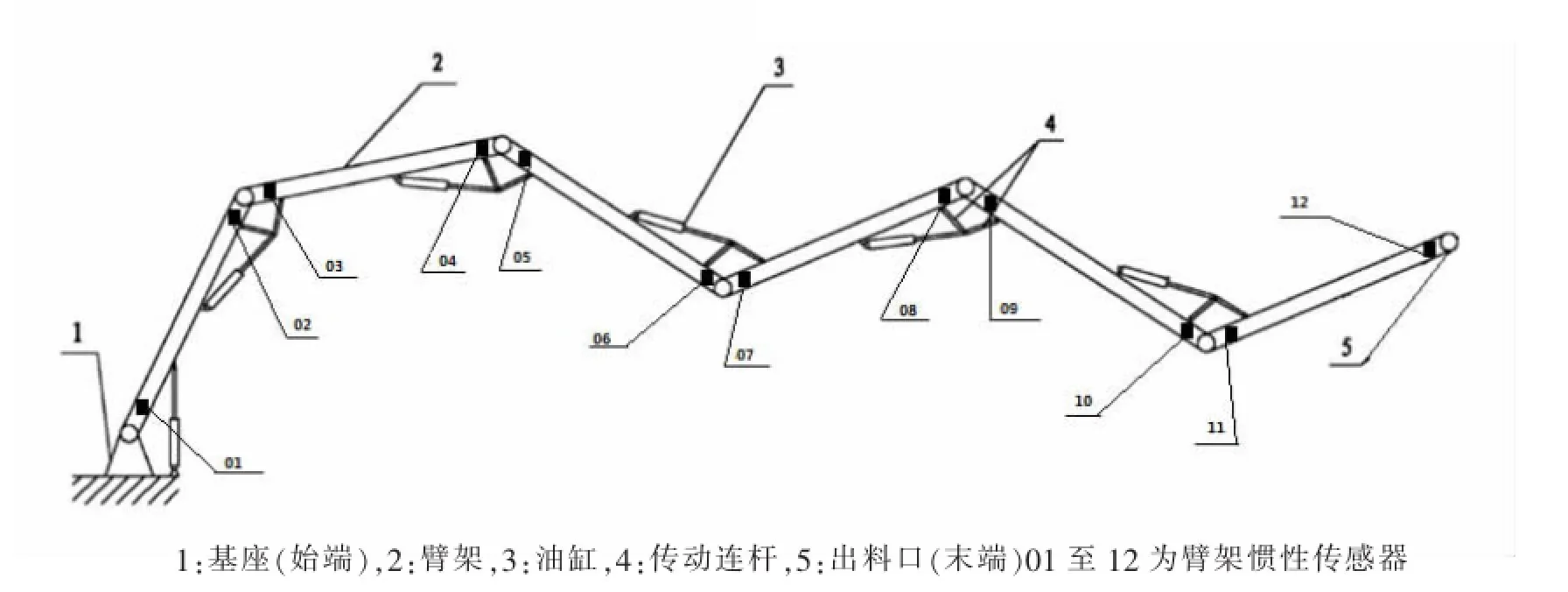
圖1 混凝土泵車臂架模型圖
當前國內外臂架姿態檢測方法主要有兩種:①基于油缸位移的檢測方法:根據油缸伸縮長度和臂架結構尺寸計算相鄰兩臂的相對角度Ain2i(如圖2所示,i為臂序數),結合臂架長度li推算出節點在豎直平面的笛卡爾坐標(Xi,Yi),依次推算出臂架空間姿態;不足在于只能檢測節點角度,檢測結果信息單一且安裝復雜。②基于傾角傳感器的檢測方法:檢測臂架兩端水平傾角值,臂架彎曲度Ain2i-l為臂架兩端傾角值之差,相鄰兩節臂夾角Ain2i等于相鄰兩節臂靠近節點處傳感器傾斜角之差;結合Ain2i-l、Ain2i與臂架長度li推算出每個節點在臂架所在豎直平面的笛卡爾坐標(Xi,Yi),得到臂架空間姿態;優點是能夠檢測臂架彎曲情況,缺點是無法檢測振動,檢測數據單一。
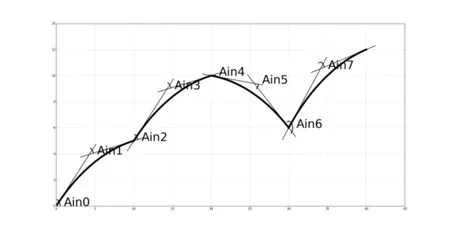
圖2 臂架空間角度描述矩陣
針對以上情況,本文提出了一種基于慣性傳感器的混凝土泵送車臂架姿態實時檢測方法。其混凝土泵車臂架模型如圖1所示,慣性傳感器安裝在01至12處,傳感器數據經過互補濾波器計算得到傳感器傾斜角,通過多個傳感器聯合計算,計算出各節臂的空間彎曲度,相鄰臂之間的空間夾角,因慣性傳感器可以檢測加速度與角速度,因此能夠實時分析臂架的振動與空間運動情況,為后續系統進行實時監測泵車臂架姿態與受力形變,泵車安全控制、智能化控制、臂架健康管理、減振控制提供有效的數據基礎。
相對于油缸位移法和傾角傳感器法,本方法安裝方便,數據內容豐富,檢測結果支持更多的工程應用,特別為臂架控制技術提供了廣闊的發展空間。
1 慣性傳感器與互補濾波器
1.1慣性傳感器
本文使用MPU6050慣性傳感器,適用于檢測加速度、角速度的多自由度運動傳感器,傳感器內部集成三軸加速度與三軸陀螺儀傳感器 (分別為Accx、Accy、Accz、Grox、Groy、Groz)XYZ軸方向遵循笛卡爾坐標系;陀螺儀最高分辨率0.0076°/s,最大量程±2000°,靜態漂移小于2%,噪音小于0.05°/s,采樣頻率8000Hz,測得數據為對應軸的角速度;加速度最高分辨率0.0006G,最大量程±16G靜態漂移小于 0.02%,噪音小于0.024G,檢測頻率1000Hz,測得數據為對應軸的加速度;慣性傳感器廣泛的用于工業自動化、工程機械、姿態控制等工業領域,慣性傳感器通常配合互補濾波器一起使用。
1.2互補濾波器
互補濾波器是專門針對于慣性傳感器數據處理的綜合濾波器,慣性傳感器中加速度傳感器靈敏度高,噪音大;而陀螺儀積分得到的角度不受加速度影響,但積分產生的漂移和溫度漂移帶來的誤差較大,這兩個傳感器可以互相彌補對方的缺點,準確地測量出慣性傳感器空間偏移角;短時間采用陀螺儀積分數據為最優,定時使用加速度采樣取平均值來修正陀螺儀得到的角度,以此達到互補的作用。
一階互補濾波器:
Angle=K·AngAcc+(1-K)·(Angle+Gro*dt)(1)
二階互補濾波器:
y1=y1+(AngAcc-Angle)·(1-K)2·dt(2)
x2=y1+2·(1-K)·(AngAcc-Angle)+Gro(3)
Angle=Angle+x2·dt(4)
2 方法的提出
假定方向以混凝土泵車底座為起始端,以臂架尾部為末端;X軸方向為臂架水平展開時由起始端指向末端,Y軸方向為臂架垂直水平面指向天空時由起始端指向末端,z軸方向垂直于XY軸所在平面,由泵車頂端向下觀測的順時針方向。
設定N=2I,N為傳感器數量,I為臂架數量,n為傳感器序數,i為臂架序數,θb為傳感器輸出值,θ為平衡濾波器輸出值。
2.1標定傳感器
在臂架收起的狀態下,臂架沒有受到負載或外力,每節臂處于近似無彎曲狀態下,使用傾角儀 (完備儀器)測量傳感器n上平面傾角真值αn,同時記錄數據處理器處理后的傳感器真值數據Accyn、Accxn,通過:

得到傳感器空間傾角真值與實際傾角值之間的偏移值γn;其中,an為傳感器實際空間傾角值,Accyn為傳感器的Y軸加速度,Accyn為感器的X軸加速度;
傳感器檢測所得空間傾角值θbn為:

2.2數據處理
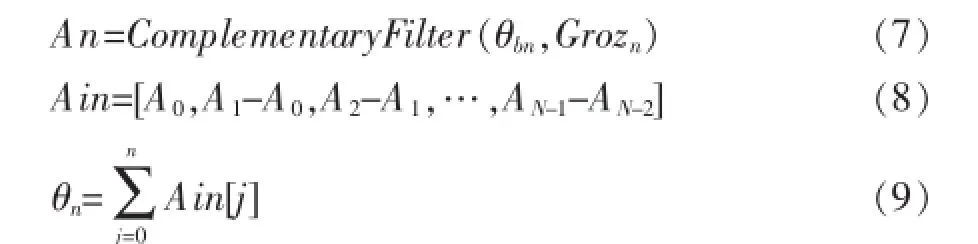
通過互補濾波,對慣性傳感器數據進行過濾消除漂移誤差(7),并構建臂架空間角度描述矩陣(8)Ain,通過臂架空間角度描述矩陣變換可以換算得到傳感器的空間傾斜角真值θn(9):
泵車展開工況下,因自重或混凝土重力導致泵車臂架產生彎曲形變,彎曲形變使用bend(x)=-asinh(tan (x/2))/sin(x/2)平拋下落曲線近似模擬;現對第i節臂進行推算,第i節臂起始端傾斜角為θ2i-1,末端傾斜角為θ2i,根據斜率在bend(x)上找到第節臂起始端(BX2i-1,BY2i-1)、末端(BX2i,BY2i)對應點:

第i節臂空間斜率k:

假設已經求出第i節臂的空間笛卡爾起始坐標(Xsi,Ysi),根據起始坐標求第i節臂的末端坐標(Xei,Yei)的方法為:

第i節臂的起點(Xsi,Ysi)與第i-1節臂的關系為:

通過公式(14),可以從第1節臂的起點(0,0)開始遞推至第I節臂,得到臂架空間笛卡爾坐標描述矩陣M:

到此通過上述的計算,臂架振動情況可以使用Accyn、Accxn、Grozn進行分析,臂架空間姿態的描述數據為臂架空間笛卡爾坐標描述矩陣M,通過M可以輕易的繪制臂架空間姿態。

圖3 試驗現場
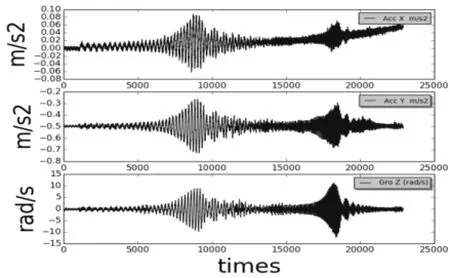
圖4 臂架末端傳感器數據
3 方法的檢驗
如圖4所示,測試實驗對象選擇徐工集團某型號混凝土泵車,進行水平空載工況下的豎直平面臂架掃頻實驗,使用計算機控制泵車液壓系統發送頻驅動信號對第1節臂施加激勵。實驗過程中發動機轉速為1650r/min,掃描起始頻率為0.1Hz,終止頻率為1Hz,持續時間為300秒,如圖5所示。
圖5為臂架12號傳感器的檢測數據,原始數據中與反映空間加速度變化狀態,反映角速度變化狀態,通過觀察圖形可以得到初步結論,在0.1Hz到1Hz之間臂架經歷了一階與二階固有頻率;圖6為經過互補濾波器處理后的空間傾角數據,從濾波結果可以看出一階互補濾波器(K=0.99)濾波現象理想,而二階濾波器檢測的空間傾角值更加能夠反映出臂架振動的情況,通過一階互補濾波器得出θ12=-3.17011。
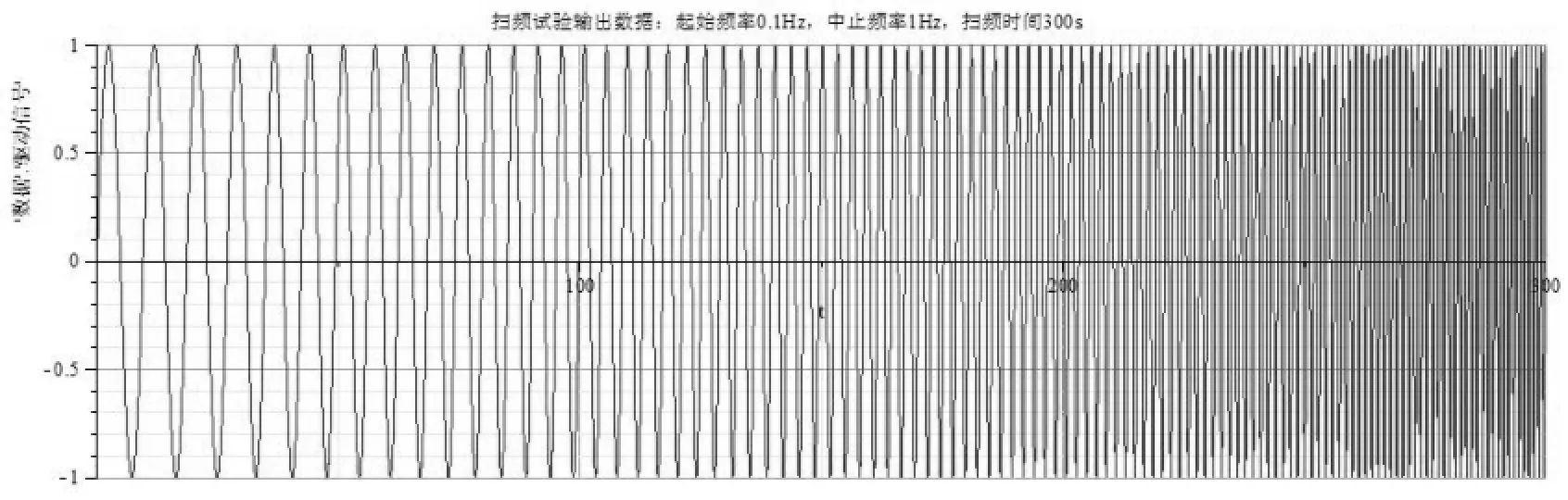
圖5 掃頻驅動信號
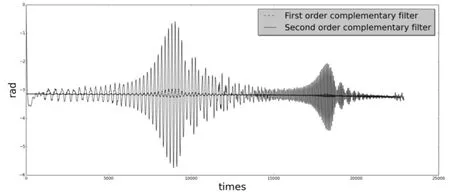
圖6 互補濾波器處理數據
圖7所示為臂架停止后在空中的保留的姿態,圖8為根據臂架空間笛卡爾坐標描述矩陣所構建的臂架空間姿態。
可以看出,根據計算得到的臂架空間笛卡爾坐標描述矩陣圖8與實際姿態圖7相同,由于照片存在偏差與繪制圖無法進行精確對比。

圖7 靜止時臂架空中姿態
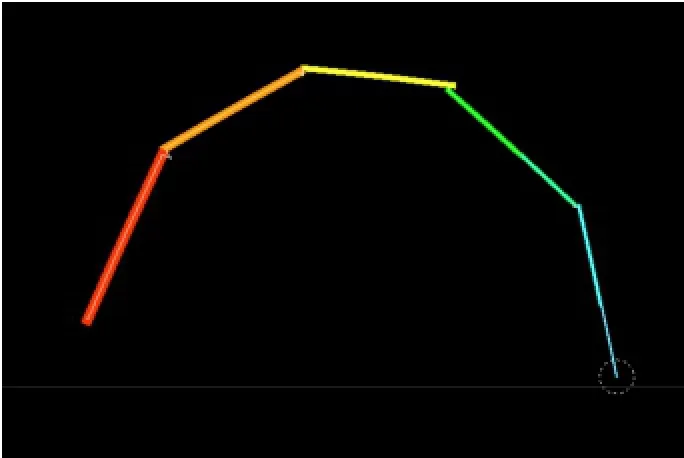
圖8 根據臂架空間笛卡爾坐標描述矩陣繪制的臂架平面圖粗端為起始端、細端為末端
4 結語
本文通過慣性傳感器檢測的方法對混凝土泵車臂架進行實時監測,實驗結果表明,理想工況下能夠實時精確地檢測混凝土泵車臂架的振動狀態,同時能夠計算出混凝土泵車臂架空間姿態,對檢測混凝土泵車臂架安全與高級應用提供了必要的數據依托,為混凝土泵車臂架高級控制提供了廣闊的發展空間;經過簡易的安裝便可以對混凝土泵車臂架進行精確的測量,經過實際的工程應用,已經應用于混凝土泵車減振系統的姿態采集部分,為減振系統提供了必須的數據來源;但本系統仍然存在不足,傳感器連接方式為有線連接,由于泵車臂架來回彎折,對信號線耐久性要求高,還需繼續改進。
[1]寧富立.現代混凝土泵車技術與發展方向[J].廣東建材,2006.
[2]黃毅,吳斌興,王佳茜.混凝土泵車臂架振動響應的主動控制實驗研究[J].振動與沖擊,2012.
[3]李勛文,尹魏林.混凝土泵車臂架特點及選用[A].工程與維修,2007,8:88-90
[4]王斌華,呂彭民.混凝土泵車臂架系統振動機理的研究[A].振動與沖擊,2011,9:258-263.
[5]雷新軍,劉永紅,張向陽,等.混凝土泵車臂架疲勞載荷譜研究[J].工程機械,2010,41(8):18-21.
[6]江國耀.混凝土泵的技術發展趨勢和市場前景[J].建筑機械,2008,8(上):16-24.
Inertial Sensor;Concrete Pump Truck;Boom;Attitude Detection
Research on the Concrete Pump Truck Boom of Real-Time Gesture Detection Based on Inertial Sensor
YOU Hai-Tao1,YANG Zhao-Wan2,YIN dong2,ZHOU Yan-hong3,YANG Hui-hua1
(1.College of Electric Engineering&Control,Guilin University of Electronic Technology,Guangxi 541000;2.Wuhan Dihe Intelligent Co.Ltd.,Wuhan 430074;3.Huazhong University of Science&Technology,Wuhan 430074)
1007-1423(2015)26-0064-05
10.3969/j.issn.1007-1423.2015.26.016
2015-04-03
2015-09-10
混凝土泵車臂架具有柔性多體系統的特點,泵送混凝土過程中臂架產生的振動增加設備整體的安全風險;實時姿態檢測為實現臂架減振與智能控制提供必要的數據支撐與保障。給出一種基于慣性傳感器的臂架姿態檢測方法和系統,通過在臂架節點上安裝慣性傳感器以檢測每節臂架的形變量和臂架運動狀態,進而計算得到臂架的振動與空間運動狀態,完成對臂架姿態的準確檢測。檢測結果表明,該方法大大提高對臂架位置檢測的精度,為后續泵車安全控制、智能化控制、臂架健康管理、減振控制提供有效的數據基礎。
慣性傳感器;混凝土泵車;臂架;姿態檢測
Concrete pump truck has the characteristics of flexible multi-body systems,pumping concrete vibration generated during the boom equipment increased overall security risks;to achieve real-time gesture detection and intelligent control arm vibration provides the necessary data to support the protection.Presents a method and system for detecting arm posture based on inertial sensors,inertial sensors by installing nodes on the jib boom to detect deformation and movement status of each boom section,and then calculates the vibration of the boom and space motion,complete and accurate detection of the boom attitude.Test results show that this method can greatly improve the detection accuracy of the position on the boom,as the follow-up pump security control,intelligent control,health management arm,damping control provides effective data base.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
