有源濾波器電流預測滯環控制
2015-09-29 07:49:33袁曉東周宇浩楊志超江蘇省電力公司電力科學研究院江蘇南京03南京工程學院電力工程學院江蘇南京67
電力工程技術 2015年5期
關鍵詞:指令
孫 蓉,袁曉東,周宇浩,葛 樂,楊志超(.江蘇省電力公司電力科學研究院,江蘇南京03;.南京工程學院電力工程學院,江蘇南京67)
有源濾波器電流預測滯環控制
孫蓉1,袁曉東1,周宇浩2,葛樂2,楊志超2
(1.江蘇省電力公司電力科學研究院,江蘇南京211103;2.南京工程學院電力工程學院,江蘇南京211167)
為改善有源濾波器(APF)因采樣率較低導致的控制誤差,提出一種基于電流預測的滯環控制方法。分析傳統滯環控制產生誤差的原因,基于APF的動力學方程構建輸出電流預測模型,利用線性插值預測指令電流,分析電流預測滯環控制工作特性。基于NI公司的CompactRIO平臺設計APF控制器,實驗對比分析了該方法與傳統滯環控制的效果,驗證了該方法改善APF控制誤差的有效性。
有源濾波器;電流預測;滯環控制;控制誤差
隨著我國日新月異的工業化進程,電網接入了大量非線性和沖擊性負載,負載產生的諧波、無功對電網的電能質量帶來了巨大挑戰。傳統的無源濾波器、投切電容器組等補償設備已無法滿足要求,而有源濾波器(APF)以其不受電網參數影響,可進行動態、快速精細化補償等優點,正在被廣泛推廣。APF的補償效果,一方面取決于電流檢測算法的準確性,另一方面取決于電流控制算法的性能[1,2]。
常用的控制算法有滯環控制、電壓矢量控制[3]、無差拍控制[4]、預測控制[5,6]等,這些算法控制效果各有所長。電流滯環控制以其快速的動態響應、魯棒性好、有內在限流能力等優點,是工程應用最廣泛的控制算法。目前對滯環控制的研究主要在以下幾個方面:文獻[7]通過引入頻率反饋,對開關頻率進行閉環控制,穩定了開關頻率;文獻[8]根據開關頻率與環寬的函數關系,采用可變環寬來實現定頻;文獻[9]利用控制器的過采樣算法穩定了開關頻率,同時提高了控制精度;文獻[10-12]在滯環控制中引入空間矢量控制,優化了滯環控制的開關狀態。以上研究主要是對滯環控制的開關頻率及開關狀態進行了優化,而對滯環控制的精度研究較少。通過APF的工程實踐發現,實際控制誤差無法完全控制在理論誤差范圍以內,存在優化改進的空間。為改善滯環控制的控制精度,文中將基于模型的電流預測方法和傳統滯環控制有機結合,提出一種基于電流預測的APF滯環控制方法。
1 電流滯環控制誤差分析
影響電流滯環控制精度的因素主要有以下兩方面。一方面,滯環控制本身就是一種誤差控制,其控制狀態是根據電流是否超出環寬來改變的,所以其環寬的1/2就是其誤差。這部分誤差理論上是無法避免的,要想減小這部分誤差只有改變其環寬,但其最小環寬的設置取決于電力電子器件的開關頻率、輸出側電感、直流側電壓等,因此若要改變環寬只有重新設計主電路。另一方面的誤差是由工程因素引起的,在實際的APF控制系統中,控制器只能處理離散數據,控制算法根據采樣點進行逐點控制,但是系統的采樣率是有限的,這就導致了控制的延時,具體分析如圖1所示。圖中:i*為指令電流;i為逆變器輸出電流;Tc為采樣周期;h為環寬。當i(1)<i*+h/2時控制狀態不會發生改變,電流將繼續上升直到下一個采樣點i(2)>i*+h/2時,控制器判斷出電流超出環寬,改變控制狀態,理論上控制狀態的改變將在i超過i*+h/2的一瞬間完成,但是由于采樣率有限導致了延遲,產生了誤差Δi。很明顯系統采樣率越高誤差Δi越小,另外電流的變化速率越小誤差也會越小,由于電流的變化速率是實時變化的,因此這種誤差的大小是隨機的,有時可能是環寬的好幾倍。

圖1 誤差分析
可見滯環控制的實際誤差是由理論誤差和工程誤差共同作用產生的,為h/2+Δi,理論誤差由主電路決定,無法通過優化控制算法來減小,但工程誤差可以通過優化控制算法減小。
2 基于電流預測的APF滯環控制
根據電流滯環控制的誤差分析可知,提高系統的采樣率可以明顯改善控制誤差,但是由于技術和成本的限制,系統的采樣通常不會超過50 K/s。考慮能否對APF的輸出電流進行預測,在2個實際采樣點之間預測幾個虛擬點,用這些虛擬點參與滯環控制,在電流超出環寬時就改變控制狀態,就可以等價于增加系統采樣率。控制原理如圖2所示。

圖2 基于電流預測的APF滯環控制
2.1輸出電流預測
APF主電路模型如圖3所示。

圖3 APF主電路模型
由電路原理可知:

定義每個橋臂的開關狀態為:


由式(1)和(2)可得:
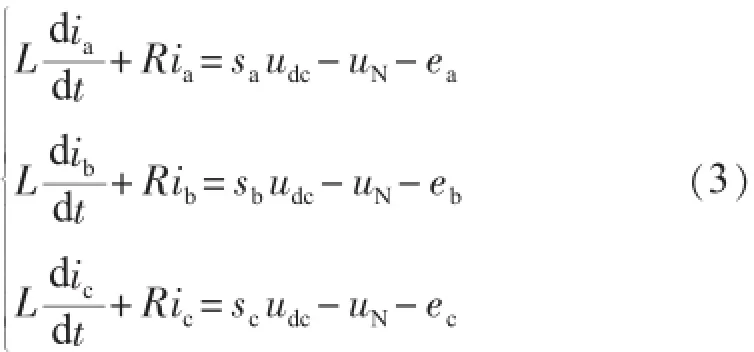
設三相電路是對稱的,則:

由式(3)和(4)聯立方程組解出:

因此式(3)可化為:

由于控制器只能處理離散的數據,因此將有源濾波器的模型離散化可得:

式中:k為某采樣時刻。根據APF的離散模型可知,通過上一個采樣時刻的數據可推算出下一個采樣時刻的電流,以A相為例,k+1時刻的電流為:
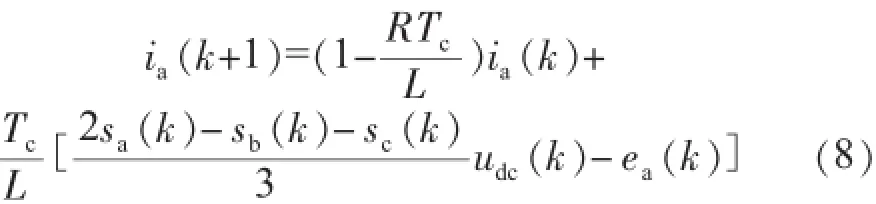
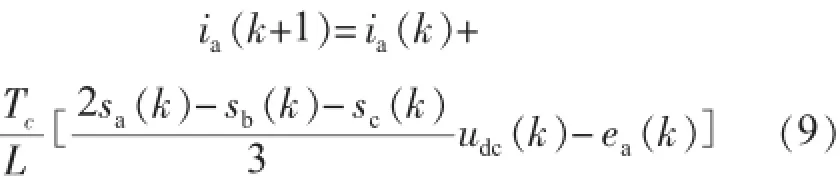
由于RT/L的值非常小,因此可以忽略,式(8)化簡為:若人為虛擬設置一個周期T替換采樣周期Tc,式(9)仍將成立,改寫為:

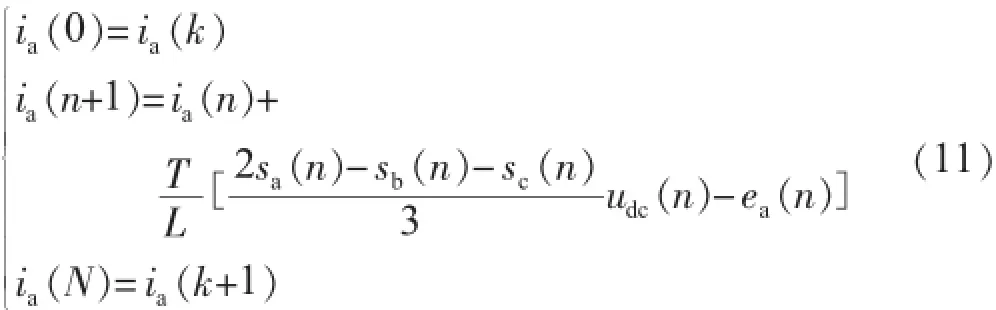
此時ia(n+1)為ia(n)經過T時間之后的值,利用式(10)預測2個采樣點之間的值。令Tc=NT,N為大于1的整數,n=0,…,L,N-1,ia(k)為實際采樣點,ia(n)為預測值,則預測值與實際采樣點的關系如式(11):
由于直流側電壓在一個采樣周期內基本保持穩定,則:

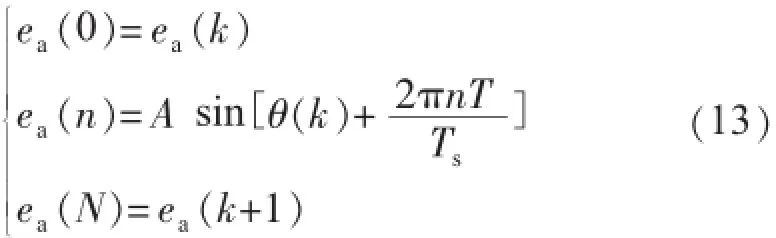
電網電壓ea(n)是正弦變換的,通過采樣點的相位就可以推算出若干時刻后的電壓,Ts為工頻周期,T為預測周期,θ(k)為k采樣時刻的相位,每經過一個預測周期相位增加,則2個采樣點之間的電網電壓函數如式(13):
2.2指令電流預測
滯環控制的本質是電流跟隨,預測出APF的輸出電流后,必須也要預測出相應時刻的指令電流,才能進行比較控制。令i*(k)為k采樣時刻檢測到的諧波電流,由于在2個采樣點之間諧波的變化很小,因此可假設2個采樣周期內指令電流近似為直線,即ia*(k-1)、ia*(k)和ia*(k+1)在同一直線上。將以ia*(k-1)ia*(k)為端點直線延長,該延長線上的點即為ia*(k)ia*(k+1)之間的預測值值,在每一個預測周期內變化量是一個常量且為[ia*(k)-ia*(k-1)]/N,則指令電流ia*(n)的預測函數如式(14):

2.3電流預測滯環控制特性分析
令采樣周期為Tc,傳統的滯環控制電流只在采樣時刻參與比較,因此如果采樣率不高,就會導致較大的控制延時,輸出電流超出環寬后較長時間內無法改變開關狀態,導致控制誤差增大,如圖4電流走向為AB-D-E,控制誤差為h/2+Δi2。該控制方法與傳統的滯環控制的最大不同是,在滯環比較器前加入了電流預測環節,用預測電流代替實際采樣電流參與滯環控制。在一個采樣周期中對輸出電流與指令電流分別進行預測,令預測周期為T,Tc=5T,利用APF模型預測出一個采樣周期中的4個輸出電流值,同時預測出一個采樣周期中的4個指令電流,將這些值進行滯環比較。由于預測周期是采樣周期的1/5,因此可以在輸出電流超出環寬后的較短時間內改變逆變器的開關狀態。如圖4所示在i(2)時刻系統預測出電流超出環寬,發出指令關斷開關,電流開始下降,控制誤差為h/2+Δi1,電流走向變為A-B-C,很明顯Δi1<Δi2系統控制誤差減小了。每一次逆變器改變開關狀態,都會將開關狀態反饋給預測算法,使得每一次的預測都是根據APF的實際狀態得出的。該預測算法只在一個采樣周期內進行預測,一旦系統接收到新的采樣點,就舍棄前一次的預測數據利用最新的采樣數據重新開始預測,因此能自動修正預測誤差,避免預測誤差的累計。
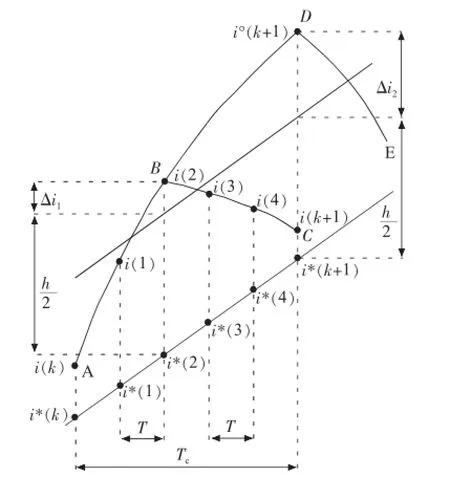
圖4 輸出電流控制特性
3 系統實現及仿真試驗
系統主電路參數如下:直流側電容為700 μF,電壓為800 V,輸出側電感為6 mH,IGBT選用三菱公司的IPM模塊,開關頻率20 kHz。
由于預測算法的計算周期只有幾微秒,對于單線程控制器會耗費很多資源,導致其他的功能無法實現。因此采用NI公司的CompactRIO-9068控制器,其內置FPGA芯片,具有天然并行的結構,循環之間不存在資源競爭,可以更好滿足控制要求。控制器軟硬件結構如圖5所示。

圖5 控制器軟硬件結構
該控制器可自主配置輸入輸出接口,通過LabVIEW語言編程。針對APF的控制要求,配置2塊9215模擬量輸入卡,采集1路溫度信號、1路直流側電壓、2路網側線電壓、2路負載電流、2路輸出電流;1塊9401數字量輸出卡,作為6路PWM波輸出;1塊9411數字量輸入卡,采集IPM模塊的故障信號。
如圖6(a)是采用傳統滯環控制補償前后的電流;圖6(b)是輸出電流與指令電流的微觀變化走向,可見輸出電流只會在采樣時刻改變,超出環寬的范圍很大,因此實際誤差比環寬大很多;圖6(c)未進行諧波補償前的網側電流諧波畸變率,為28.37%。圖6(d)是采用傳統滯環算法補償后的諧波畸變率,為7.25%。
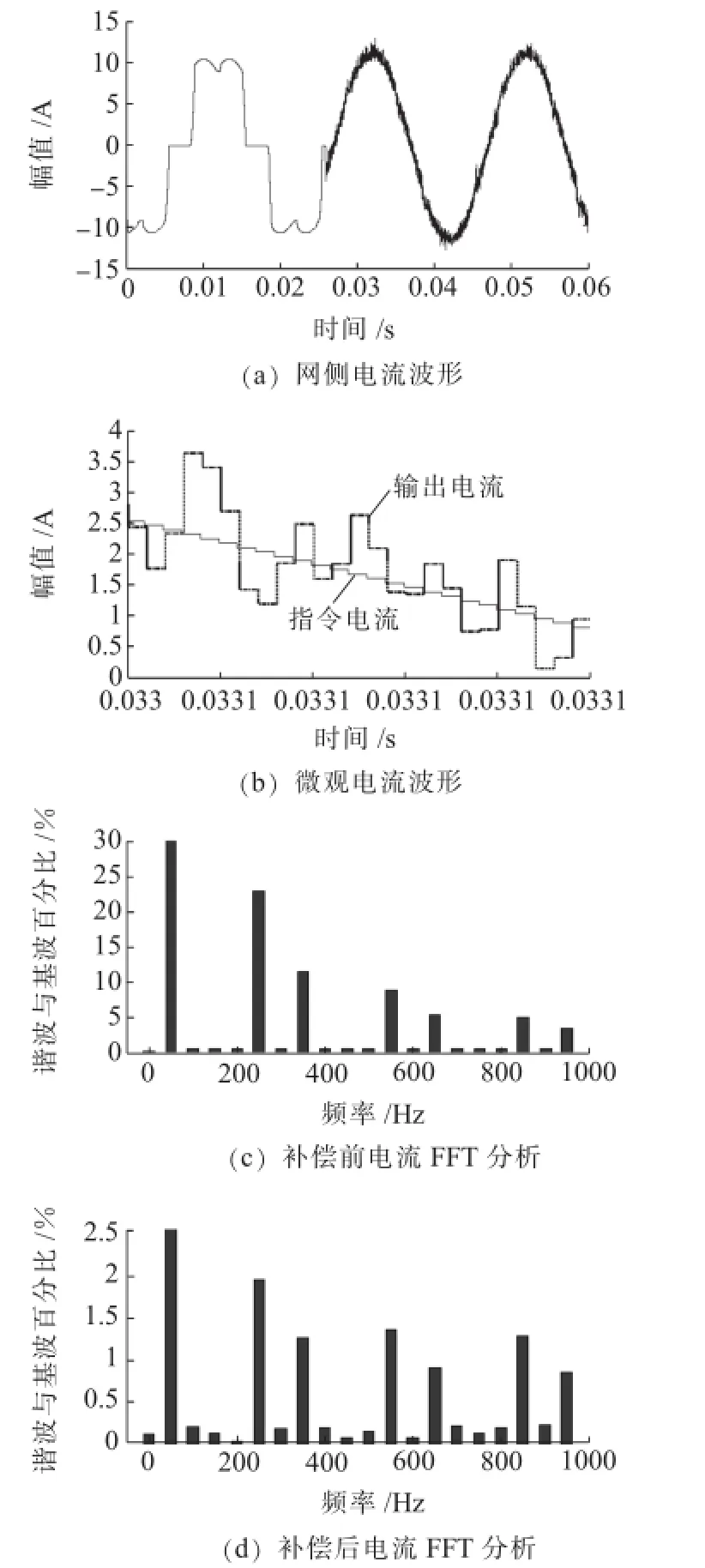
圖6 APF傳統滯環控制效果
如圖7(a)是采用基于電流預測的滯環控制補償前后的電流;由圖7(b)微觀電流變化可見實際輸出電流基本在環寬以內,在一個采樣周期內預測輸出電流對實際輸出電流進行預測,一旦預測出電流超出環寬就改變電流狀態,無需等到下一個采樣時刻,從而保證了輸出電流被限制在環寬以內;由圖7(c)可知補償后的諧波畸變率為4.77%。

圖7 基于電流預測的滯環控制效果
4 結束語
提出一種基于電流預測的APF滯環控制方法,目的是改善采樣率引起的控制誤差。在傳統滯環控制中加入了電流預測環節,基于APF的動力學模型預測輸出電流,利用線性插值預測指令電流,運用這2個預測電流參與滯環比較,改變了傳統滯環控制只能在采樣時刻判斷輸出電流是否超出環寬的不足,一旦預測出電流超出環寬就及時改變電流方向,大大減小了輸出電流超出環寬的幅值,提高了控制精度。為了克服預測算法的誤差,采用只在一個采樣周期內部進行預測,一旦有新的采樣值則重新開始預測,自動修正誤差,避免誤差的累積。仿真試驗驗證了該控制方法可明顯改善由采樣率導致的控制誤差,在采樣率較低的情況下也能有較好的控制精度。
[1]范小波,張代潤,孫茜,等.三相三線有源電力濾波器滯環電流控制策略[J].電力系統自動化,2007,31(18):57-60.
[2]吳峰,鄭建勇,梅軍,等.并聯有源濾波器PWM控制策略比較與實驗分析[J].電力系統及其自動化學報,2012,24(3):53-58.
[3]許曉彥,楊才建,Janusz Mindykowski.有源濾波器空間矢量脈寬調制電流跟蹤算法的優化[J].電力系統自動化,2012,36(4):80-84.
[4]楊勇,阮毅,葉斌英,等.三相并網逆變器無差拍電流預測控制方法[J].中國電機工程學報,2009,29(33):40-46.
[5]楊勇,趙方平,阮毅,等.三相并網逆變器模型電流預測控制技術[J].電工技術學報,2011,26(6):153-159.
[6]吳勇,徐金榜,王慶義,等.并聯有源電力濾波器電流預測控制[J].華中科技大學學報,2008,36(4):99-102.
[7]楊旭,王兆安.一種新的準固定頻率滯環PWM電流控制方法[J].電工技術學報,2003,18(3):24-28.
[8]洪峰,單任仲,王慧貞,等.一種變環寬準恒頻電流滯環控制方法[J].電工技術學報,2009,24(1):115-119.
[9]曹武,劉康禮,江楠,等.有源濾波過采樣數字滯環電流跟蹤控制方法[J].電力系統自動化,2014,38(6):85-90.
[10]曹武,趙劍鋒,江楠.有源濾波器同步坐標系下的空間矢量滯環電流控制新方法[J].電工技術學報,2013,28(12):173-180.
[11]申張亮,鄭建勇,梅軍,等.基于改進電壓空間矢量調制的有源濾波器雙滯環電流跟蹤控制策略[J].中國電機工程學報,2011,31(15):8-14.
[12]王文,羅安,徐先勇,等.有源濾波器雙滯環空間矢量離散控制方法[J].中國電機工程學報,2013,33(12):10-17.
Based on Current Predict of Active Power Filter Hysteresis Control
SUN Rong1,YUAN Xiaodong1,ZHOU Yuhao2,GE Le2,YANG Zhichao2
(1.Jiangsu Electric Power Company Electric Power Research Institute,Nanjing 211103,China 2.School of Electrical Engineering,Nanjing Institute of Technology,Nanjing 211167,China)
In order to reduce the APF control error caused by sampling rate,a method of predictive hysteresis control based on current prediction is proposed.The cause of hysteresis control error is analyzed.On the basis of the active filter dynamics model,output current prediction model is established,the target current is predicted by linear interpolation,and the working principle of this control method is introduced.A controller system is designed based on the CompactRIO.The experimental result comparisons between the proposed method and traditional hysteresis control show that the proposed method is effective in reducing control error.
active power filter;current predict;hysteresis control;control error
TM761,TN713.8
A
1009-0665(2015)05-0054-05
孫蓉(1979),女,江蘇江都人,高級工程師,從事電網穩定分析,電力電子與新能源并網技術工作;
袁曉東(1979),男,江蘇無錫人,高級工程師,從事新能源并網及主動配電網技術工作;
周宇浩(1990),男,江蘇蘇州人,碩士在讀,專業為光伏發電及電能質量治理;
葛樂(1982),男,江蘇泰州人,副教授,從事新能源與主動配電網研究工作;
楊志超(1960),男,江蘇常州人,教授,從事電網主設備安全運行、新能源與主動配電網研究工作。
2015-05-14;
2015-06-29
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
