3D街景測量及數據處理研究
2015-10-09 20:34:33張淑峰
科技資訊 2015年18期
張淑峰
摘 要:該文以城市三維街景測量和數據處理為研究對象,探討將激光掃描儀、差分全球衛星定位系統、CCD相機集成于一體的3D測量系統,并論述了數據處理的流程和三維建模的方法,相信對從事相關工作的同行能有所裨益。
關鍵詞:3D 街景 測量 數據處理
中圖分類號:P208 文獻標識碼:A 文章編號:1672-3791(2015)06(c)-0045-02
目前,空對地觀測已發展有機載和星載的高分辨率、高光譜和雷達觀測技術,但仍未解決城市高層建筑遮擋區、高層建筑物立面,以及城市和眾多工程建設所需的高速度的三維測量問題。將激光掃描儀(Laser Scanner, LS)、差分全球衛星定位系統(Differential Global Positioning System, DGPS)、CCD相機(Charge Coupled Device, CCD)集成于一體,并開發多源信息復合處理的軟件,使之構成綜合、完善、靈活的工程實用系統,并具備應用需求的多項基本功能。研制了具有自主控制、移動地理坐標框架特點的車載式近景目標三維數據采集系統的實驗樣機和相應的數據處理軟件包。系統集成了新近發展的多種傳感器,可以實時地完成載體的GPS定位數據、建筑物的激光掃描數據以及CCD影像數據的采集。相應的數據處理軟件包具有如下功能:后處理GPS數據,提供載體的地理位置、速度和傳感器的坐標和方位;后處理激光掃描數據,提供建筑物的距離、高度或寬度乃至特征線;后處理CCD影像數據,提供經過糾正的建筑物的立面紋理;建立建筑物的三維模型,實現建筑物的三維重建。
1 系統硬件構成
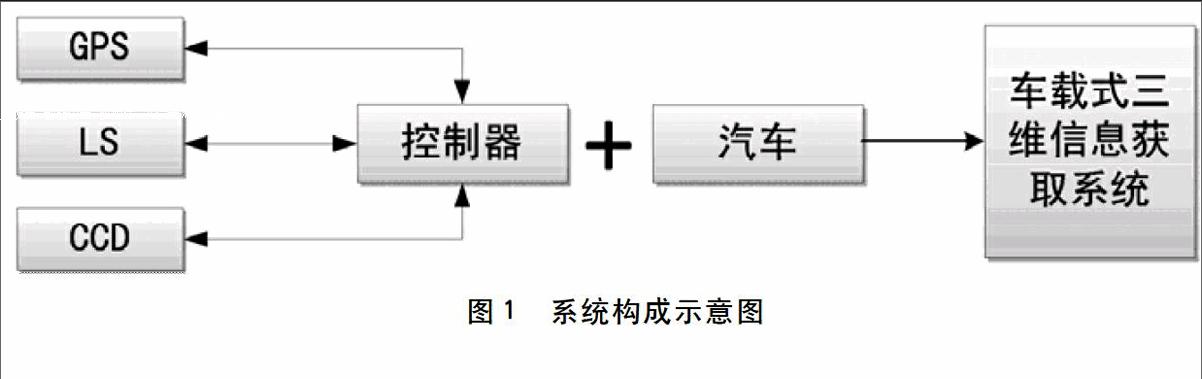
系統硬件主要由DGPS、LS、CCD三種傳感器、系統控制器以及汽車構成。作業示意框圖如圖1所示。
由3臺車載GPS接收機和1臺基站接收機構成GPS差分系統,按照一定的采樣頻率接收信號,以為LS和CCD提供定位和定向數據。LS在垂直于行駛方向作二維掃描,以汽車行駛方向作為運動維,構成三維掃描系統。掃描數據經過后處理,用以提取相對建筑物的攝影距離、高度和寬度乃至特征線。CCD提供數字影像,經糾正后形成建筑物的紋理,并構成建筑物三維模型。而系統控制器則用于設備的接口、同步、控制,數據的采集、記錄和傳輸。
系統以汽車為運載平臺,車內緊靠駕駛室設有較寬敞的工作臺,其上安置有以工控機為主的控制系統。車頂安裝有堅固座架,特制的集成傳感器的安裝平臺安裝在座架上。CCD、LS、DGPS安置在安裝平臺的相應位置。安裝平臺由下支架和上支架兩部分組成。各支架均使用U83的鋼管。下支架與座9架固連,其上裝有3個DGPS接收天線,上支架相對下支架有360°旋轉自由度,以適應不同方位目標的CCD攝像與LS的掃描。上支架3的中部裝有激光掃描儀LS及其防護罩,上支架兩側分別設有托板,每個托板上裝有2臺CCD數碼相機箱體,上箱體上還裝有攝像機。上箱體相對下箱體有50°旋轉仰俯角,以對高層建筑物上部攝像。所有控制線路密封地與車內工控機相聯接。
1.1 DGPS接收機
汽車頂部3臺DGPS接收機用以實時測定激光掃描儀系統LS和數碼相機CCD的空間位置。使用專門建立的室外試驗場(或室內試驗場),預先精密地測定了DGPS、LS和CCD的相對三維位置。
該系統選用NovAtel DL-4-L1/L2型GPS接收機,其后處理動態精度10mm±0.002mm,原始數據輸出頻率和位置輸出頻率為20 Hz,信號重捕獲時間為0.5s(L1)、6s(L2),差分速度精度為±0.03m/s,時間精度為±1.2 ns。選用的GPS-600型天線具有零相位中心及抗電磁波干擾及多路徑誤差的特性。使用自行開發的軟件,實現單歷元相對定位,以獲得平臺上各傳感器的實時三維空間位置。
1.2 激光掃描儀
采用RIEGL公司的LMS-Q140-i 80型掃描儀,是一種二維激光掃描儀,在該系統上豎直安裝,進行“鉛垂面”掃描。主要用以在動態狀況下測定被攝物體的高度。該掃描儀的主要性能包括:安全級別屬A級;掃描角度為±40°內;掃描距離為最小2m,最大350—700 m;標稱精度為±(2.5~5)cm;采樣頻率為28kHz;最大掃描速度為40線/s。
1.3 CCD相機
該系統的CCD數碼相機,用以獲取被攝物體的紋理。基于多片空間后方交會的CCD數碼相機的精確檢校,是建立該系統的重要技術組成。據多次試驗,主距與主點坐標的檢測中誤差均小于1個像素,光學主畸變系數K1檢測中誤差小于10-11。
該系統選用日本尼康公司的Nikon D1x型數碼相機,其主要性能指標是:變焦主距為17—25mm和28—70mm;芯片像幅為23.7mm×15.6mm;芯片分辨率為3008×1960像素。
1.4 控制器
該系統控制器為一個集成化的操作平臺,安置在汽車駕駛員后。主要功能是:對各傳感器進行參數設置、啟動和關閉操作,以及對傳感器采集的數據實施傳輸和記錄。所采集的數據包括數碼相機的影像數據、激光掃描儀的線陣數據以及GPS定位的偽距觀測量和導航電文。數據采集電控系統硬件設計、研制和優化,包括工控機系統的組成,單片機系統的設計,系統與傳感器接口及信號連接的設計和實現。工控機系統是采集軟件的硬件平臺和傳感器接口的硬件平臺;單片機系統用于實現CCD相機的手動和自動拍攝以及GPS同步信號的發送。
1.5 控制軟件功能
該軟件的主要功能是配合硬件采集系統,完成以下操作:
(1)全球衛星定位系統GPS的實時數據采集;(2)激光掃描儀LMS的實時數據采集;(3)數碼相機的拍攝控制與采集圖像的存取和傳輸;(4)GPS數據與LMS和CCD數據的“同步”。
該軟件系統在Win98/2000的搶先式多任務操作系統下開發,運用較先進的多線程技術解決了海量數據采集過程的實時、同步和可靠性問題;主要應用Win32下的重疊I/O串行通信和并行通信技術。
2 數據處理與三維建模
在多種傳感器集成的本車載移動測量系統中,GPS實時提供平臺的運動軌跡與方位參數,數碼相機CCD以人工設置的各種參數連續進行攝像,掃描儀LS按其自有的頻率實施掃描,以獲得目標與掃描儀的相對關系。由于多種傳感器安置在車上的不同位置,參考坐標系統不同,各傳感器采集的數據描述復雜,數據的采樣間隔也不一樣,因此對各種數據進行了匹配與整合。
2.1 GPS數據處理
基線解算采用加拿大GrafMov6.03軟件,該軟件具有移動基線單歷元解法,可動態初始化。單歷元解算過程中的關鍵問題是快速解算整周模糊度。數據處理中,將三個接收機間的固定基線長度作為約束條件,約束整周模糊度的搜索空間,以提高解算速度和可靠性。基線解算具有正算和逆算兩種方法,以盡量減少因失鎖而引起的數據丟失。將解算的基線向量作為觀測值,用已知的基線長度作為約束,用附有條件的間接平差單歷元解算天線坐標。根據天線與其他傳感器間的固定關系解算各傳感器中心的坐標。
2.2 掃描數據處理
激光掃描數據的處理過程可細分為數據的濾波、糾正、分類和特征提取與建模。采用的處理流程是:(1)從數據庫中調入原始數據,根據已知參考信息對原始觀測值進行概算,將地形數據與地物數據分離;(2)對地物數據進行濾波,去除噪聲和遮擋物(如樹木等)的影響,得到建筑物數據;(3)根據建筑物特征,對連續掃描的激光測量斷面進行整體匹配糾正,得到建筑物特征;(4)根據糾正信息對原始測量數據進行重新計算,得到反映建筑物表面幾何特征的三維掃描坐標;(5)提取建筑物的高度以至特征線。
2.3 影像數據處理
研制了被攝目標表面正射投影方向紋理的糾正軟件,以及支持OpenGL映射紋理的相應結構的紋理的重構軟件。
該模塊基于視差理論的機器立體視覺,運用車載動態攝像機對同一景物從不同位置成像獲得立體像對、輔以GPS定位與激光掃描提取框架模型坐標,通過各種算法匹配出相應像點,從而計算出視差,然后采用基于數字近景攝影測量的方法恢復深度(距離)信息,以提取空間模型的三維坐標。在恢復空間模型的同時,直接進行三維空間信息紋理糾正,并獲得紋理信息。最后,建立基于地面三維測量數據的城市環境與工程建筑物的虛擬現實表示的數字近景目標三維城市景觀系統。
2.4 三維表達
為適應不同環境的需要,在三維表達方面實現有兩種建模系統,即基于地面CCD影像的建模系統和基于地面與空中影像相結合的建模系統。
依據三維空間建模的方法不同,本系統軟件具有以下三個功能:
(1)在不具備定位控制基準信息的前提下,僅利用CCD相機獲取的影像,利用立體像對的空間關系,并通過相對控制條件的引入,實施光束法平差,建立空間三維模型。(2)在引入GPS空間定位數據、激光掃描數據和CCD相機影像數據基礎上,利用空間的起算基準數據,解算基于此起算標準的空間三維模型坐標,再建立真實三維模型。(3)利用空地一體,即基于空中遙感影像與地面控制點,解算和提取模型框架的空間三維坐標,并輔與地面側面的紋理影像,建立可視化、可量測化真三維模型。使用本系統所制作的山東科技大學青島校區可視化三維模型,其中圖(a)為低俯角圖,圖(b)為高俯角圖。
3 結語
(1)集成多臺全球定位系統GPS接收機、二維激光掃描系統LS及多臺CCD相機,構建了一種新穎的車載式城市信息快速獲取系統。(2)該系統聯同空對地觀測手段,特別是低空傾斜影像航空攝影測量手段,構成了數字城市真三維建模的完整技術,以較高的作業效率為特點。(3)本系統在多傳感器的集成、車內實時控制器硬軟件的設計與制作以及基于建筑物平行線組的單片攝像建模的理論與實現等方面的研究工作,對數字城市的實現有明顯的作用。
參考文獻
[1] 魏波,張愛武,李佑鋼,等.車載三維數據獲取與處理系統設計與實現.中國體視學與圖像分析,2008(1):30-33.
[2] 李暢,張劍清,胡敏.數碼城市的街道立面自動三維重建.武漢大學學報工學版,2009(3):358-361.
[3] 王芬旗,廖佳,王苑楠,朱秋曄.基于Alatu earth的城市街景仿真輔助審查應用研究.城市勘測,2011(5):24-27.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
當代化工研究(2016年9期)2016-03-20 16:22:13
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
