基于模糊控制的電動助力轉向系統控制策略研究
2015-10-09 21:21:20梁志宏
科技資訊 2015年18期
梁志宏
摘 要:隨著現代汽車電子控制技術的飛速發展,電動助力轉向(ElectricPowerSteering,簡稱EPS)系統正逐步取代傳統液壓助力轉向系統。該文通過對汽車電動助力轉向系統的動力學分析,建立了車輛了EPS系統的動力學模型,提出了基于模糊控制的EPS系統助力控制策略,并對其建模仿真,為電動助力轉向系統的設計與開發提供理論基礎和設計方法。
關鍵詞:電動助力轉向 助力特性 模糊控制
中圖分類號:U463.4 文獻標識碼:A 文章編號:1672-3791(2015)06(c)-0118-02
電動助力轉向系統是集合安全、環保和節能為一體的助力轉向技術,它的助力特性屬全車速感應型,通過對EPS控制器進行軟件的編程設定,能夠方便地對系統的助力特性進行調節,使汽車可以在不同工況下獲得相應的助力特性,從而提高駕駛員在轉向時的路感和手感。與傳統的液壓助力轉向系統相比,電動助力轉向系統的助力機構由復雜的液壓機構變成了依靠電動機產生助力的系統,系統通過控制助力電動機電流的方向和幅值,實現為轉向器提供助力扭矩的要求,提高了汽車在低速行駛時轉向操縱的輕便性;同時又保證了汽車在高速行駛時穩定的轉向手感,從而提高高速行駛時的操縱穩定性。由于取消了液壓泵、儲液罐、液壓管路等液壓系統,電動助力轉向系統比液壓助力轉向系統更容易進行裝配和檢測,能耗低,也更環保。[1-4]在汽車產品環保、低能耗和智能化的大方向下,目前國外多家大型公司的EPS產品已經成功裝配于微、輕型轎車,國內對EPS的研究已經取得了一定的成果,但與國際先進水平依然存在一定的差距。著眼于未來的汽車轉向系統巨大的潛力,開發EPS系統,尤其制定性能可靠的EPS控制策略對于提高我國汽車行業的競爭力具有一定的現實意義。
1 電動助力轉向系統結構原理
1.1 電動助力轉向系統結構
電動助力轉向系統主要由裝在轉向器輸入端的轉向(轉矩)傳感器、機械式轉向器、車速傳感器、電子控制單元(ECU)、電動機、減速器和電源等組成。[4,5]ECU根據作用在轉向盤上的轉向轉矩信號以及車速信號、發動機轉速信號等,決定EPS系統是否投入工作。當轉向盤轉動時,經過對其轉矩信號的采集、判斷和處理后,根據ECU存儲器中制定的助力特性,控制電動機的旋轉方向和作用在電動機上的助力轉矩電流的大小及作用時間。通過減速器將輔助動力施加到轉向系統中,從而完成助力轉向的實時控制。低速行駛時助力作用大,轉向輕便;高速行駛時減小助力,以提高路感和操縱穩定性。
1.2 電動助力轉向系統的控制策略
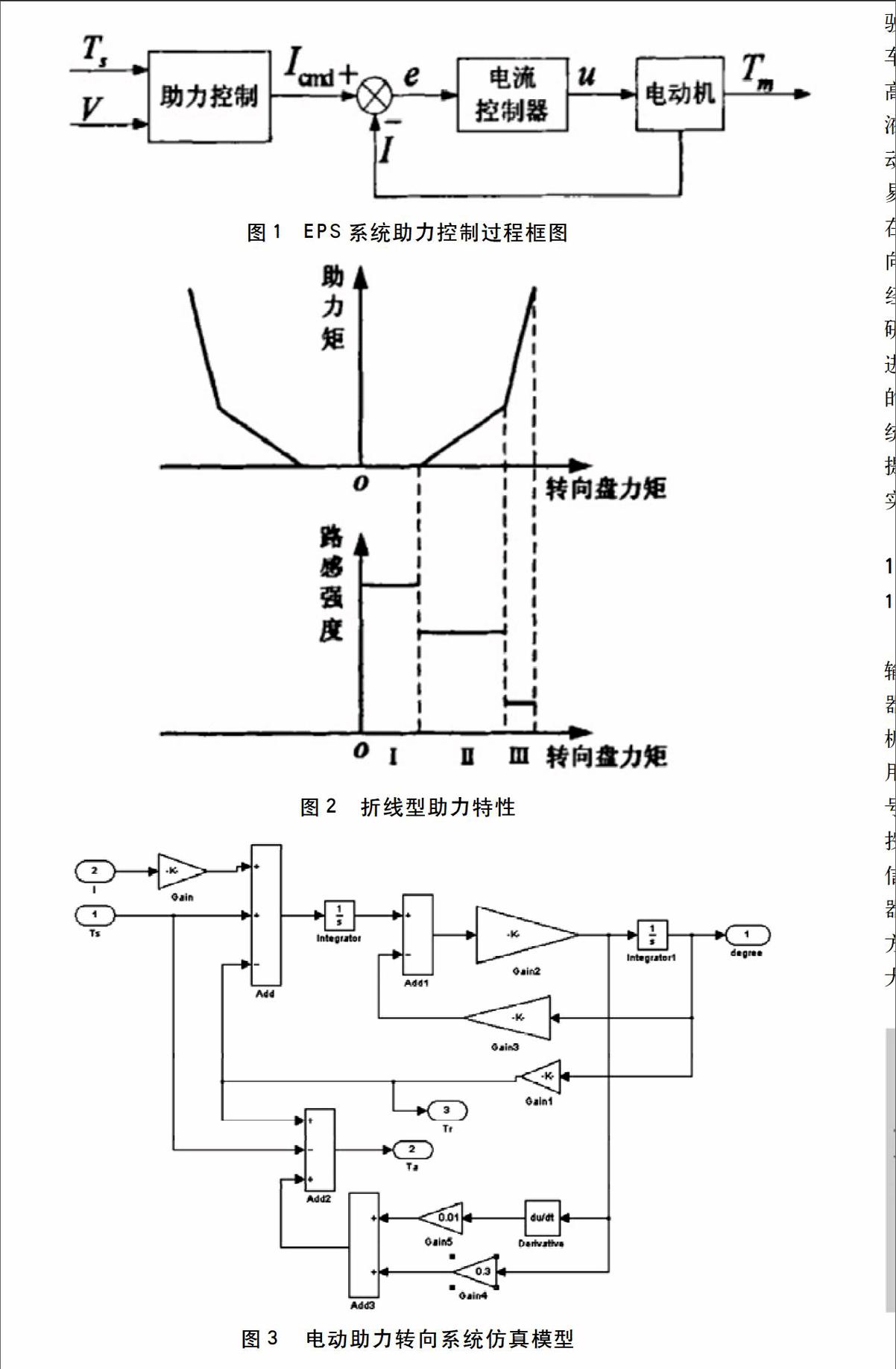
EPS系統的主要功能給助力電動機提供一個合適的驅動力、保持良好的轉向路感,同時確保轉向響應速度、抑制來自轉向系統內部的振動和路面不平造成的振動和沖擊。EPS系統控制策略主要包括轉向助力控制、回正控制和阻尼控制等。而轉向助力控制是其基本的控制策略。在汽車轉向過程中,ECU根據駕駛員作用在轉向盤上的輸入轉矩和當前車速信息,由存儲在ECU中的助力特性決定應提供多大的助力電流給電動機,從而得到與不同行駛工況相適應的轉向助力。圖1所示為EPS系統的助力控制過程框圖,ECU根據轉向盤轉矩傳感器檢測到的轉矩信號和車速傳感器檢測到的車速信號V,由轉向助力特性確定電動機的目標電流,之后由電流控制器控制電動機的電流,使電動機輸出目標助力矩Tm。
EPS的助力特性由嵌入其ECU中的程序設置,可以輸出任意形狀的助力特性曲線,且調節方便。該文采用如圖2所示的一種折線型的助力特性曲線,該特性曲線由直線行駛區I、強路感區II和輕便轉向區Ⅲ等三個助力區域組成。在無轉向或轉向角非常小的中心區域對應助力曲線采用直線行駛區I;輕便轉向區則是對應轉向角較大的區域;強路感區介于二者之間。
折線型助力特性曲線可用以下函數表示,式中,、分別為助力特性曲線的梯度,其具體數值隨車速的增加而減小,Td為轉向盤輸入力矩。該助力曲線的特點是轉向助力與轉向盤力矩成分段線性關系,易于編程實現。
(1)
2 基于模糊控制的轉向助力控制
2.1 電動助力轉向系統數學模型
電動助力轉向系統的數學模型由轉向機構機械模型、電動機模型、ECU控制算法模型等模塊組成,[8,9]根據EPS系統各模塊間的聯系建立系統仿真模型如圖3所示。輸入為系統給定信號即轉向盤轉矩和反饋信號即電動機的電流I,輸出為作用到轉向軸下端的轉角degree和助力力矩。
2.2 模糊規則的建立
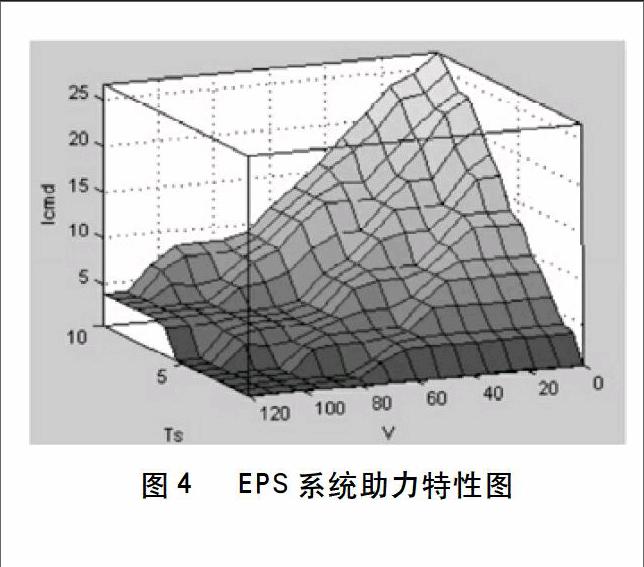
模糊集合理論(FuzzySetTheory)1965年由Zadeh教授提出,模糊控制是基于“專家知識或操作經驗,采用語言規則表示的一種人工智能控制策略。[8,9]電動機助力電流的控制決策所采用的是一個雙輸入單輸出的模糊控制器。輸入量分別為轉向盤轉矩和車速V,輸出量是電動機的助力電流。該文設的論域為[1,10],單位是N·m,V的論域為[0,120],單位是km/h。設的論域為[0,28],單位是A。制定好控制規則,建立轉向助力電流決策的模糊控制器后,可以得到該系統助力特性三維圖,如圖4所示。從圖中可以清晰地看到不同車速、轉向盤輸入轉矩下對應的助力電機轉向助力電流值。
3 系統仿真運行結果
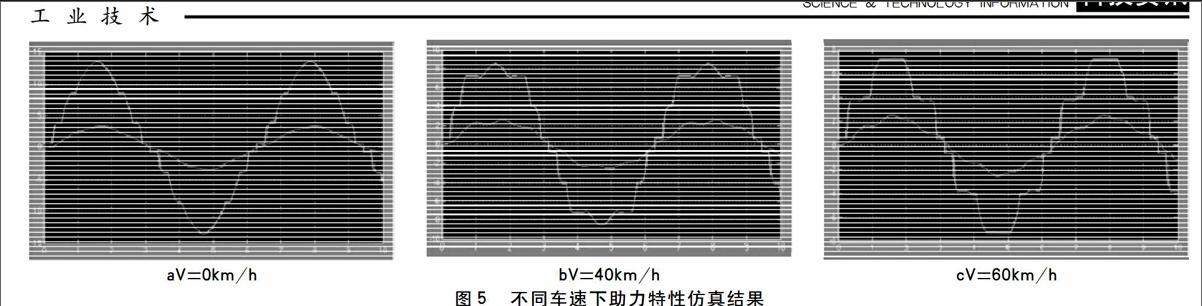
圖5中分別為車速在00km/h、40km/h及60km/h下的轉向助力特性曲線,曲線表明該文制定的助力控制策略是符合實際EPS系統在行駛過程中對轉向助力的要求的。通過該控制策略能得到與不同工況相匹配的轉向助力電流值。
4 結語
該文通過分析EPS系統的關鍵技術和工作原理對電動機特性參數與EPS系統的匹配進行了討論,完成了EPS系統各部件的選型及數學模型的建立。設計了一種基于模糊控制的EPS系統轉向助力控制策略,并在simulink中進行了仿真,得到了在不同車速和轉向盤轉矩輸入下的轉型助力特性曲線,該控制器對助力電機的電流具備較高的響應速度,所制定的轉向助力控制策略和控制方法基本可以滿足實際EPS系統的要求。
參考文獻
[1] 陳家瑞,馬天飛,蔣興閣等.汽車構造(第五版)[M].北京:人民交通出版社,2005.
[2] 齊軍國.汽車電動助力轉向系統的設計與實現的研究[D].上海:上海交通大學,2005.
[3] 劉惟信.汽車設計[M].北京:清華大學出版社,2001.
[4] 郭孔輝.汽車操縱動力學[M].長春:吉林科學技術出版社,199l.
[5] 葉耿,楊家軍,劉照,等.汽車電動式動力轉向系統轉向路感研究[J].華中科技大學學報,2002,30(2):24-26.
[6] 陳奎元,馬小平,季學武.電動助力轉向系統控制技術的研究[J].江蘇大學學報,2004,25(1):21-24.
[7] Thomas D.Gillespie(趙六齊,金達鋒.譯).車輛動力學基礎[M].北京:清華大學出版社,2006.
[8] 曾光齊,胡均安,王東,等.模糊控制理論與工程應用[M].武漢:華中科技大學出版社,2006.
[9] 李書龍,許超.電動助力轉向系統中的模糊控制[J].公路交通科技,2004,21(4):l01-103,108.
