基于GPS的橋梁變形監測應用分析
2015-10-12 09:02:41鄧罡
地球 2015年7期
鄧罡
(湖南省邵陽市武岡市國土資源勘測院湖南邵陽422400)
基于GPS的橋梁變形監測應用分析
鄧罡
(湖南省邵陽市武岡市國土資源勘測院湖南邵陽422400)
隨著現代橋梁工程建造技術的不斷發展以及各類先進建筑材料的應用,大量設計獨特的新型大跨度橋梁建成并投入運營。大型橋梁本身結構十分復雜,人們對其運營安全問題也越來越重視,對此,需要引入對橋梁變形的監測。本文對基于GPS的橋梁變形監測技術進行了分析,并通過實例驗證了自適應Kalman濾波方法對監測數據處理的優越性。
橋梁變形監測GPS自適應Kalman濾波
1 GPS變形監測及橋梁變形監測中的應用
1.1變形監測
1.1.1變形監測概念
變形現象是自然界中各種物體普遍存在的,物體在受到各類外界因素的影響之后發生形變,并且形變會隨著時間和空間的變化而不斷發生變化,其中包括物體的位置、形狀和大小的形變,都被稱為變形[1]。對于建筑物來說,當其形變量在設計的承載范圍之內時,可以保證建筑物的安全使用,但是如果形變量一旦超過承載范圍,就可能影響建筑物本身結構的穩定性,而發生事故。因此,對建筑物的變形監測顯得尤為重要。對建筑物的變形監測主要是利用專業的測量儀器和方法,對變形體的形變量進行安全監測,比如對大地的形變監測、地表沉降監測等。通過獲取該變形體的形變數據,確定變形的形狀、大小和位置隨著時間變化的特征以及空間狀態,同時通過各種方法對所獲取的形變數據進行分析和處理,最終認識到變形體的具體變形規律和變形的原因,進而完成對變形體在未來一段時間內的變形預測。變形監測具有非常廣泛的應用,根據監測區域的差異可以分為以下三個方面[2]:
(1)對全球性的變形監測研究,例如全球板塊的運動、地球自轉速度的變化等;
(2)對地殼的形變、城市地面沉降等區域性的變形監測;
(3)針對某工程的建筑物及局部區域的變形監測、比如地標移動、滑坡體、橋梁變形監測等。
1.1.2橋梁變形的原因分析
為了對橋梁變形進行充分的研究,首先需要對橋梁變形的原因進行深入的分析。通過確定引起這些變形的權重關系并對監測數據進行分析,建立相匹配的數學模型,從而對橋梁的變形進行預測,為橋梁的安全運營提供科學的依據。通常情況下,橋梁的變形主要包括以下三個方面的原因[3]:
(1)自然條件。由于橋墩所處的地理位置較為特殊,橋墩的水文地質、工程地質以及其所在位置土壤的物理特性、誰知條件、氣候變化等因素都可能導致橋墩發生不同程度的沉降。另外,橋身和在屋的壓力以及其服役的時間、橋面車輛對橋身的撞擊等都會不定時和不定點的導致橋身發生變形。
(2)橋梁自身原因。橋梁自身原因主要是由于橋梁本身的設計問題,如果橋梁在運行過程中,實際荷載超過設計荷載,就會對橋身結構造成極大的傷害,加速橋梁的變形,導致橋梁的變形量超出預計范圍。
(3)設計和人為施工。勘測、設計的不合理以及運營管理缺乏科學性都可能導致橋梁的變形。橋梁結構和大小決定了橋梁的具體通行和荷載性能。地質條件的勘測是橋梁建設的基礎,一旦橋梁的建設規模超過地質條件的允許范圍,就會導致橋梁發生變形。另外,人為施工的缺陷也容易導致橋梁加速變形。
1.1.3橋梁變形監測的特點及方法
橋梁變形觀測具有重復觀測、觀測精度要求高等特點,同時需要多種觀測方法的綜合運用。由于形變是每時每刻都在發生的,這就需要對橋梁進行周期性的重復觀測,具體的觀測周期主要由變形量的大小以及變形的速度決定的。目前,針對橋梁變形的觀測方法主要包括以下幾種:
(1)精密水準測量。該方法是一種傳統的測量方法,測量結果可靠、數據精度高,但是需要消耗大量的人力和物力,這也使得該方法的應用范圍受到了較大的限制。
(2)三角高程測量。隨著現代電磁波測距技術的不斷發展,該測量方法的測量精度可以達到二等水準測量的標準,可以很好的滿足變形監測的精度要求。如果監測工作對精度的要求較高,但是又需要采用三角高程測量時,首先需要進行詳細的設計和論證,來保證達到監測要求。
(3)靜力水準測量。該方法主要是通過連通器對兩點之間的相對變形量進行測量,具有精度高、速度快等特點,被廣泛應用于各種工程變形監測工作中。
(4)GPS高程測量。GPS高程測量的精度相對于平面測量略低。通常采用靜態模式測量的精度可以達到±5mm,而動態模式測量的精度通常能夠達到±40mm,相對較低。目前國內外的橋梁變形監測工作中,GPS高程測量方法已經取得了不錯的成果。相對于其它方法來說,GPS技術結合了平面測量和高程測量,可以對工程進行垂直位移、水平位移以及撓度的同步觀測。其次,GPS測量具有精度高、全天候以及實時動態監測等優點,并且能夠提供某個時間段橋梁監測點與某個絕對參考系統的相對位置和移動信息,已經成為現代工程變形觀測技術發展的主要趨勢。
1.1.4橋梁變形監測的主要內容
橋梁變形監測的內容主要包括水平位移監測、豎直位移監測、撓度監測、傾斜監測、裂縫監測。水平位移監測主要是確定變形體在水平面上的位移隨時間變化的工作,而水平位移的方向可能是任意的,也就是說他具有無數種可能。通常我們通過對其不同時期的平面坐標進行描述,對比其變化前和變化后的平面坐標,確定其變形的距離和方向。采用的方法主要有基準線法和導線法。其中由基準線法就衍生出了很多種專門的觀測方法,如視準線法和引張線法。豎直位移觀測主要是用來觀測變形體在垂直方向上的變形,也被稱為沉陷觀測或者沉降觀測。其主要表現形式為高程隨著時間的變化,即高程關于時間的函數。在橋梁的運營期間,定期通過精密水準測量的方法對測點進行觀測,從而確定其高程,通過對不同時期同一測點高程的比較,從而確定高程隨時間的變化量,即它的沉降值。目前對變形體的沉降觀測方法有普通的幾何水準測量,也有液態靜力水準測量。撓度監測、傾斜監測、裂縫監測其實就是水平位移和垂直位移的綜合體,他們都可以通過對水平位移和垂直位移來表示,是水平位移和垂直位移演變的結果。撓度觀測、傾斜觀測、裂縫觀測都有其專門的觀測方法,比如說用來撓度觀測正垂線結構,用于傾斜觀測的投影法,用于裂縫觀測的玄式位移計等。
1.2 GPS原理及在橋梁變形監測中的應用
GPS是當前應用最廣泛的衛星定位系統之一,目前的GPS衛星星座由24顆GPS衛星布設,全球覆蓋率達到了98%[4]。
1.2.1GPS定位原理
GPS的定位原理是利用空間分布的GPS定位衛星以及衛星于地面點的距離交匯計算出地面交匯點的位置,即通過空間的距離交匯原理實現定位。假設在地面待定位置上安置一臺GPS接收裝置,該裝置在同一時刻接收到4顆以上的GPS衛星所發射的信號。通過一定的方法測定所有衛星在該時刻的位置以及它們與接收機之間的距離,然后利用距離交匯法計算出測站P的位置以及接收機的時鐘差δt。
假設在時刻t時,測站點P通過接收機同時接收到測點P到四顆GPS衛星G1、G2、G3、G4之間的距離ρ1、ρ2、ρ3和ρ4,通過GPS電文解譯出四顆GPS衛星的三維坐標(Xj,Yj,Zj),j=1,2,3,4,通過距離交匯方法計算出P點的三位坐標(X,Y,Z)的具體公式如下所示:
公式中的c表示光速、δt表示GPS接收機的時鐘差。
1.2.2GPS在變形監測中的應用
GPS技術經過多年的發展,已經成為多用途、多領域、多模型的國際化高技術產業,GPS信號被認為是最重要的資源之一。同時,隨著GPS系統的不斷發展和完善,其應用領域也不斷擴展。相對于傳統的測量方法,GPS技術具有明顯的優勢,其中GPS憑借全天候、高精度、高效率、實時動態等多種優點成為了現代工程變形監測的主要手段之一。由于監測對象和精度要求的差異,GPS變形監測工作中所采取的具體方式和數據處理的方式也存在一定的差異。GPS在變形監測中包含周期性重復測量、固定連續GPS陣列以及實時動態監測三種模型。其中,固定連續GPS陣列模型通常被用于監測變形速度較快以及突變情況的緩慢變形,而周期性重復測量和實時動態監測則被用于較為緩慢的變形監測。
2 實例分析
2.1工程概況
以邵陽市西湖大橋工程為例,該橋于1997年6月開工,1999年9月25日竣工,橋長747.08m,寬29.14米,系下承式鋼管砼系桿拱橋,其主橋箱梁柔性系桿多點連續頂推施工方案的設計和水下嵌巖逾30m深的挖孔樁垂直控制及灌注砼鋼中籠位固定成樁檢測方案為全國首創。該橋共有3個孔,其中跨徑最大的達到了180m,橋面為雙向6車道,同時還設有人行道,橋面的總寬度為21m,其中行車道的寬度為18m[5]。
本次對橋梁的變形觀測實驗,共布設20個橋梁監測點進行周期性重復觀測,觀測的時間從2014年8月5日到2014年12月16日止,觀測周期為一周觀測一次。在每個觀測站進行觀測時,將接收機設置為靜態模式,每期觀測90分鐘,設置采樣率為10Hz。
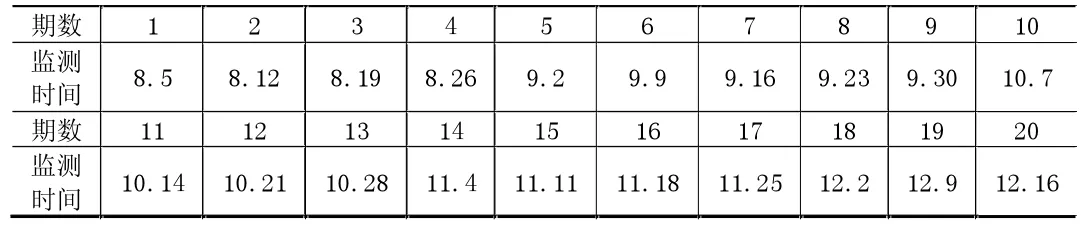
表1 橋GPS監測試驗觀測時間(2014年)
2.2橋梁檢測試驗數據處理分析
2.2.1自適應Kalman濾波
Kalman濾波算法通過遞推實現,即在數據處理的過程中,不需要對之前的觀測數據進行存儲,只需要提供當前時刻的觀測數據,最終得出估計誤差最小的狀態估計值[6]。
在利用Kalman濾波進行數據處理時,需要假設數據模型和噪聲是已知量,但是在實際應用過程中,這些條件通常屬于未知量,或者只能知道其中的一部分。在利用這些不確定的知識進行Kalman濾波的設計時,所得到的系統狀態估計值可能與最佳估值存在一定的誤差,或者可能估值是發散的。而通過大量的研究,自適應Kalman濾波的提出很好的解決了這一問題,其自適應的特點非常適合在動態系統中的應用。其中方差補償自適應Kalman濾波模型是當前應用最廣泛的一種自適應Kalman濾波模型,方差補償自適應Kalman同樣采用遞推算法,它通過利用已知信息來修正動態噪聲方差向量,從而使得計算所得到的估值更加接近實際。
離散線性系統的狀態方程和觀測方程如下:
公式中的Xk和Xk-1分別表示第k和k-1期的n維狀態向量,其中k=1,2,…;Φk,k-1分別表示第k期和k-1期的狀態轉移陣;Ωk-1表示第k-1期的r維動態噪聲向量;Γk,k-1表示第k-1期動態噪聲系數陣;Lk和Bk分別表示第k期m維的觀測向量和系數陣;Δk表示第k期m維觀測噪聲向量。要求{Ωk}和{Δk}為互補相關的零均值白噪聲序列,具體如下:

公式(4)中的DΩk表示動態噪聲方差;D△k表示觀測噪聲方差;δkj表示Kronecker-δ函數,如下:

假設標準的Kalman濾波狀態一步預測方程為:

預報誤差協方差陣為:

濾波增益矩陣為:

狀態濾波方程為:

濾波誤差協方差陣為:

公式中的X贊k,k表示濾波值,Lk-BkX贊k,k-1表示預報殘差。
假設{Ωk}和{Δk}為正態序列,X0表示正態向量。假設第i步的預測殘差如下:
公式中的Lk+i和L贊k+i/k分別表示第k+i期的觀測值與最佳預測值。
Vk+i的方差陣如下:

公式中的r=1,…,n;k=1,…,n。
假設在觀測時間段tk+1,tk+2,…,tk+n上DΩr-1Ωr-1為常值對角陣,則:
則,

公式中的ηk+1屬于零均值隨機變量,r=1,2,…,N。使得

又可以采用下面的形式表示:
則可以得到關于diagDΩΩ的線性方程:E=AdiagDΩΩ+η
當n>r時,則方程存在唯一解,則diagDΩΩ的LS估計為:

通過該公式可以計算出任意時段的DΩΩ,并且以計算出的結果作為動態噪聲協方差向量的實時估計。
2.2.2基于Matlab的自適應Kalman濾波程序設計
基于Matlab的自適應Kalman濾波程序設計步驟如下:
Step1:由變形監測系統的狀態方程和觀測方程確定系統的狀態轉移矩陣、動態噪聲向量以及觀測噪聲向量;
Step2:確定濾波的初始輸入參數;
Step3:通過Step1和Step2得到一步預測值、預報協方差向量、殘差和增益矩陣;
Step4:對其中的m組觀測數據進行讀取;
Step5:重新以Step3對讀取到的數據進行計算;
Step6:對濾波值和協方差陣進行計算;
Step7:存儲最后一組的狀態向量估計值和其所對應的協方差陣;
Step8:等待當前時段的觀測數據;
Step9:利用最新的一組觀測數據替換掉m組觀測數據中的第一組數據,并回到Step1,重新進行自適應Kalman濾波,如此遞推,最終實現自動濾波的目的。
2.2.3方差補償自適應Kalman濾波的應用
本次實驗共進行20期觀測,以每期觀測90分鐘為一個時段獲得監測點的實測空間坐標。在進行數據分析的過程中,首先利用標準Kalman濾波方法對所獲取的坐標數據進行濾波估計,分析實際觀測數據與計算結果的一致性;然后通過方差補償自適應Kalman濾波方法對所獲取的坐標數據進行預測估計,并分析實際觀測數據與計算結果的一致性;最后比較兩種方法之間的效果差距[7]。表2中所示為兩種Kalman濾波值與實測值的差值比較結果(取前5期觀測數據)。
從表2中的數據可以看出,利用標準kalman濾波和方差補償自適應Kalman濾波兩種方法對監測數據進行處理的結果的位移變形的總體趨勢基本相同。另外,在X、Y方向上實測值與自適應補償Kalman濾波值的絕對差值基本小于實測值與標準Kalman濾波值差值的絕對差值。經過對所有數據進行計算,其中在X方向上,在Y方向上,實測值與自適應Kalman濾波值的絕對差值平均為0.80mm,而實測值與標準Kalman濾波值的絕對差值平均為1.40mm。通過這一結果可以得出,方差補償自適應Kalman濾波方法相對于標準Kalman濾波方法具有更高的可靠性。

表2 監測點kalman濾波值與實測值的差值比較數據(單位:mm)
2.2.4預測對比分析
橋梁結構中,塔柱的變形幅度一般相對較大,本文以橋粱南塔柱為例,選取X方向的變形量為研究對象進行分析。在南塔柱測得的全部20期數據中,首先將前15期數據作為訓練樣本,以BP網絡進行訓練,對最后5期數據進行預測,再采用前15期的方差自適應Kalman濾波數據對后5期的數據進行預測,最后,與實測的最后5期數據進行對比,后5期的數據預測結果如表3所示。
從表3種的數據可以看出,方差補償自適應Kalman濾波每次預測的絕對誤差值基本趨于穩定,平均保持在0.85mm左右,而BP神經網絡每期的預測值的絕對誤差不斷增大,最大絕對誤差達到4.5mm。從這里可以看出,方差自適應Kalman濾波具有更好的預測精度,這主要是由于方差自適應Kalman濾波方法在預測的過程中會對動態噪聲進行不斷修正。
3 結論
本文首先對橋梁變形監測的相關理論進行了分析,并討論了常用的監測技術,其中GPS技術近年來發展迅速,經過多年的發展之后,其以實時、動態、高精度等特點被廣泛應用到橋梁變形監測工作中。通過對某大橋的實際監測數據進行分析,驗證了方差補償自適應Kalman濾波在對監測數據處理中的優勢。通過對橋梁變形監測數據的準確監測,對橋梁長期保持運營安全具有重要的意義。
[1]過家春.GPS技術在橋梁變形監測中的應用研究[D].合肥工業大學,2010.
[2]姚海敏.大型橋梁結構變形監測應用研究[D].中國地質大學(北京),2009.
[3]王建波,欒元重,許君一,劉娜.小波分析橋梁變形監測數據處理[J].測繪科學,2012,(03):79-81.
[4]羅運海.非量測數碼相機監測橋梁變形的研究[D].廣東工業大學,2013.
[5]王小敏,熊軍,馬木欣.基于GPS的大跨度橋梁變形監測與數據處理[J].武漢理工大學學報(交通科學與工程版),2009(02):219-222.
[6]王建波.小波變換在橋梁變形監測數據處理中的應用[D].山東科技大學,2011.
[7]胡現輝,尤相駿,潘國榮.電子水平儀在橋梁變形監測中的應用[J].測繪工程,2008,(01):51-54.
X924.2[文獻碼]B
1000-405X(2015)-7-222-3
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中國公路(2017年11期)2017-07-31 17:56:30
中國公路(2017年10期)2017-07-21 14:02:37
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:04