基于視頻車(chē)輛運(yùn)動(dòng)軌跡場(chǎng)的交通事件檢測(cè)方法
2015-10-13 01:03:20李倩麗宋煥生
電視技術(shù) 2015年13期
關(guān)鍵詞:檢測(cè)
李倩麗,宋煥生,2
(1.長(zhǎng)安大學(xué) 信息工程學(xué)院,陜西 西安 710064;2.陜西省道路交通智能檢測(cè)與裝備工程技術(shù)研究中心,陜西 西安 710064)
基于視頻車(chē)輛運(yùn)動(dòng)軌跡場(chǎng)的交通事件檢測(cè)方法
李倩麗1,宋煥生1,2
(1.長(zhǎng)安大學(xué) 信息工程學(xué)院,陜西 西安 710064;2.陜西省道路交通智能檢測(cè)與裝備工程技術(shù)研究中心,陜西 西安 710064)
針對(duì)現(xiàn)有交通事件檢測(cè)算法存在的模型復(fù)雜、運(yùn)算量大,并且檢測(cè)結(jié)果滯后的缺點(diǎn),提出了一種基于視頻車(chē)輛運(yùn)動(dòng)軌跡場(chǎng)的交通事件檢測(cè)方法。該方法以基于視頻的車(chē)輛跟蹤軌跡為基礎(chǔ),形成正常車(chē)輛運(yùn)動(dòng)軌跡場(chǎng),進(jìn)而將當(dāng)前車(chē)輛軌跡矢量與正常軌跡場(chǎng)矢量比較,最終實(shí)現(xiàn)了對(duì)超速、慢行、變道和逆行的異常交通事件的檢測(cè)。研究結(jié)果表明,與傳統(tǒng)方法相比,該方法算法簡(jiǎn)單,并且可以快速、準(zhǔn)確地對(duì)異常交通事件進(jìn)行檢測(cè)。
視頻;軌跡場(chǎng);交通事件檢測(cè)
隨著科技的發(fā)展,基于視頻的檢測(cè)技術(shù)得到迅速發(fā)展,交通視頻領(lǐng)域的研究熱點(diǎn)也逐步轉(zhuǎn)移到對(duì)基于視頻檢測(cè)技術(shù)的交通事件檢測(cè)的研究上[1]。Fernyhough等[2]通過(guò)對(duì)視頻序列中目標(biāo)的跟蹤軌跡學(xué)習(xí)、分析,構(gòu)造出事件模型,實(shí)現(xiàn)對(duì)異常事件的預(yù)測(cè)和檢測(cè);Mohnhaupt等[3]通過(guò)建立三維場(chǎng)景,得到交通檢測(cè)數(shù)據(jù),例如車(chē)輛的行駛方向及位置等;Kumar[4]利用運(yùn)動(dòng)目標(biāo)與交通場(chǎng)景內(nèi)的靜態(tài)物體以及動(dòng)態(tài)目標(biāo)之間的相互關(guān)系檢測(cè)異常事件。以上這些算法都存在運(yùn)算量大、模型復(fù)雜的缺點(diǎn)。伍友龍[5]通過(guò)直線(xiàn)擬合,將復(fù)雜的運(yùn)動(dòng)車(chē)輛跟蹤軌跡曲線(xiàn)擬合為直線(xiàn),將軌跡曲線(xiàn)曲率變化用直線(xiàn)差角代替,分析得到運(yùn)動(dòng)車(chē)輛行駛方向變化,從而實(shí)現(xiàn)對(duì)異常事件的檢測(cè),該算法簡(jiǎn)單,但是不能滿(mǎn)足實(shí)時(shí)檢測(cè)事件的要求。
針對(duì)目前現(xiàn)有的交通事件檢測(cè)算法存在的缺點(diǎn),本文提出了一種基于視頻的車(chē)輛運(yùn)動(dòng)軌跡場(chǎng)的交通事件檢測(cè)方法,在目標(biāo)車(chē)輛提取與跟蹤過(guò)程中,采用了傳統(tǒng)的基于像素塊的幀間差分法提取運(yùn)動(dòng)目標(biāo)[6]和基于特征的跟蹤方法[7]。而對(duì)于事件的檢測(cè)部分,本文提出一種新的檢測(cè)方法,在視頻圖像中形成一個(gè)正常車(chē)輛運(yùn)動(dòng)的軌跡場(chǎng),將當(dāng)前車(chē)輛運(yùn)動(dòng)軌跡矢量與正常軌跡場(chǎng)矢量比較,最終實(shí)現(xiàn)了對(duì)超速、慢行、變道和逆行的異常交通事件的檢測(cè)。
1 基于目標(biāo)特征點(diǎn)的跟蹤
異常交通事件的檢測(cè)是建立在對(duì)運(yùn)動(dòng)車(chē)輛跟蹤并獲得其運(yùn)動(dòng)軌跡的基礎(chǔ)之上,因此,車(chē)輛行為分析的精度很大程度上取決于對(duì)運(yùn)動(dòng)車(chē)輛跟蹤的準(zhǔn)確性。
本文采用基于特征的目標(biāo)跟蹤算法,使用基于像素塊的幀間差分法進(jìn)行運(yùn)動(dòng)目標(biāo)提取,其公式如下
(1)

特征的提取是基于特征的動(dòng)態(tài)目標(biāo)跟蹤方法的關(guān)鍵所在,本文以塊為單位選擇角點(diǎn)為特征點(diǎn),選擇Moravec角點(diǎn)檢測(cè)算法,實(shí)現(xiàn)對(duì)目標(biāo)的跟蹤,其計(jì)算公式為

GrayImage[x+i][y+j])2
(2)
由于需要計(jì)算角點(diǎn)周?chē)?個(gè)塊的能量變化情況,其計(jì)算量較大,為減少運(yùn)算量,本文只計(jì)算觀(guān)察窗口在左、右斜對(duì)角線(xiàn)方向以及橫向、縱向4個(gè)方向上平均能量的變化情況,并為盡量避免乘方運(yùn)算,使用絕對(duì)差值代替能量值進(jìn)行計(jì)算,取絕對(duì)差的最小值作為該點(diǎn)的角點(diǎn)興趣值。
本文采用塊匹配法,以角點(diǎn)所在塊為中心,在其周?chē)x擇一定大小的區(qū)域作為匹配模版,以SAD為匹配準(zhǔn)則,采用全搜索法在時(shí)間序列中選擇該角點(diǎn)的匹配位置,進(jìn)而實(shí)現(xiàn)目標(biāo)跟蹤。
2 車(chē)輛運(yùn)動(dòng)軌跡場(chǎng)的形成
在不影響檢測(cè)結(jié)果的前提下,為減少計(jì)算量,首先將圖像劃分成小塊,塊的大小應(yīng)與幀差法提取運(yùn)動(dòng)目標(biāo)時(shí)所取塊大小相同,再以每個(gè)小塊中心為原點(diǎn)建立如圖1所示的局部坐標(biāo)軸,其中實(shí)線(xiàn)為局部坐標(biāo)軸,虛線(xiàn)為圖像坐標(biāo)軸。
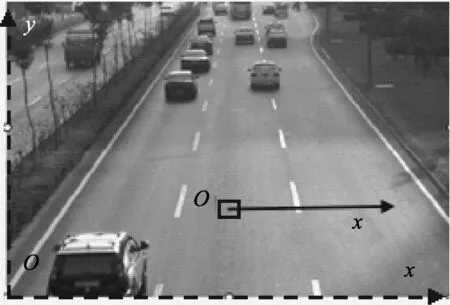
圖1 局部坐標(biāo)軸與圖像坐標(biāo)軸示意圖
在視頻序列播放過(guò)程中,保存視頻序列中軌跡長(zhǎng)度滿(mǎn)足跟蹤150幀以上的運(yùn)動(dòng)車(chē)輛行駛軌跡信息,軌跡的信息包括軌跡線(xiàn)上每個(gè)軌跡點(diǎn)的坐標(biāo)、長(zhǎng)度、方向,其中坐標(biāo)指軌跡點(diǎn)相對(duì)于視頻圖像坐標(biāo)軸的位置坐標(biāo),長(zhǎng)度指當(dāng)前軌跡點(diǎn)相對(duì)于在同一條軌跡線(xiàn)中上一幀保存的軌跡點(diǎn)之間的距離,單位為像素,方向指當(dāng)前軌跡點(diǎn)與在同一條軌跡線(xiàn)中上一幀保存軌跡點(diǎn)之間的連線(xiàn)相對(duì)于當(dāng)前軌跡點(diǎn)所在小塊局部坐標(biāo)軸的角度。當(dāng)視頻序列播放到1 500幀時(shí)(根據(jù)場(chǎng)景中車(chē)流量設(shè)定,此處的車(chē)流量為先驗(yàn)所得),將1 500幀中保存的所有經(jīng)過(guò)每個(gè)小塊的軌跡點(diǎn)的長(zhǎng)度和方向分別求和、求平均,最后平均值作為每個(gè)小塊相對(duì)于局部坐標(biāo)軸的二維矢量,所有小塊的二維矢量就構(gòu)成了運(yùn)動(dòng)車(chē)輛的軌跡場(chǎng),如圖2所示。

圖2 運(yùn)動(dòng)車(chē)輛軌跡場(chǎng)
3 交通事件檢測(cè)
當(dāng)發(fā)生變道、逆行、慢行、超速異常交通事件時(shí),其對(duì)應(yīng)的異常車(chē)輛軌跡矢量與正常車(chē)輛軌跡矢量對(duì)比示意圖如圖3所示,其中實(shí)線(xiàn)為正常軌跡,虛線(xiàn)為異常軌跡。定義異常軌跡與正常軌跡之間長(zhǎng)度差為Δd,夾角為Δθ,計(jì)算公式分別為式(3)和(4)
Δθ=abs(θ(x,y)-θ(xi-yi))
(3)
Δd=d(x,y)-d(xi-yi)
(4)
式中:θ(x,y),d(x,y)分別表示中心位置為(x,y)的小塊的二維矢量的方向和長(zhǎng)度;θ(xi,yi),d(xi,yi)分別為當(dāng)前處在以(x,y)為中心的小塊內(nèi)軌跡點(diǎn)的方向和長(zhǎng)度。
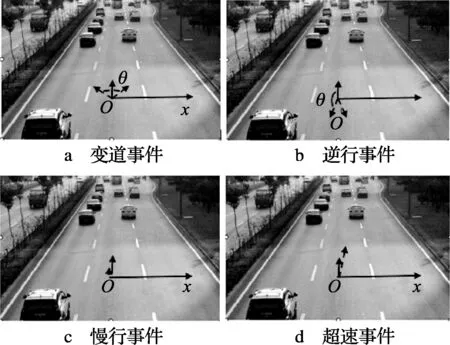
圖3 異常車(chē)輛軌跡矢量與正常車(chē)輛軌跡矢量對(duì)比示意圖
變道時(shí)對(duì)應(yīng)滿(mǎn)足條件為Δθ值為(60°,180°),逆行時(shí)對(duì)應(yīng)條件為Δθ滿(mǎn)足(180°,360°),慢行時(shí)對(duì)應(yīng)的條件為d
4 實(shí)驗(yàn)結(jié)果與分析
本文提到的方法,采用VC++6.0的開(kāi)發(fā)工具,對(duì)幾段視頻(720×288,25 f/s)進(jìn)行了測(cè)試,在幀差提取運(yùn)動(dòng)目標(biāo)部分,塊的大小n采用8×6,閾值T確定為30時(shí)提取到的運(yùn)動(dòng)目標(biāo)效果最好,平均處理速度為每幀20 ms,完全滿(mǎn)足了實(shí)時(shí)處理的需求。圖4為變道、逆行、超速、慢行檢測(cè)結(jié)果,正常車(chē)輛運(yùn)動(dòng)軌跡形成的二維矢量,為方便觀(guān)察,長(zhǎng)度為相隔5幀的距離,單位為像素。圖中軌跡編號(hào)為該軌跡在當(dāng)前視頻圖像序列中被檢測(cè)到的順序編號(hào),該方法不需要二維空間映射、三維空間映射的復(fù)雜程序,大大提高了程序的處理速度。
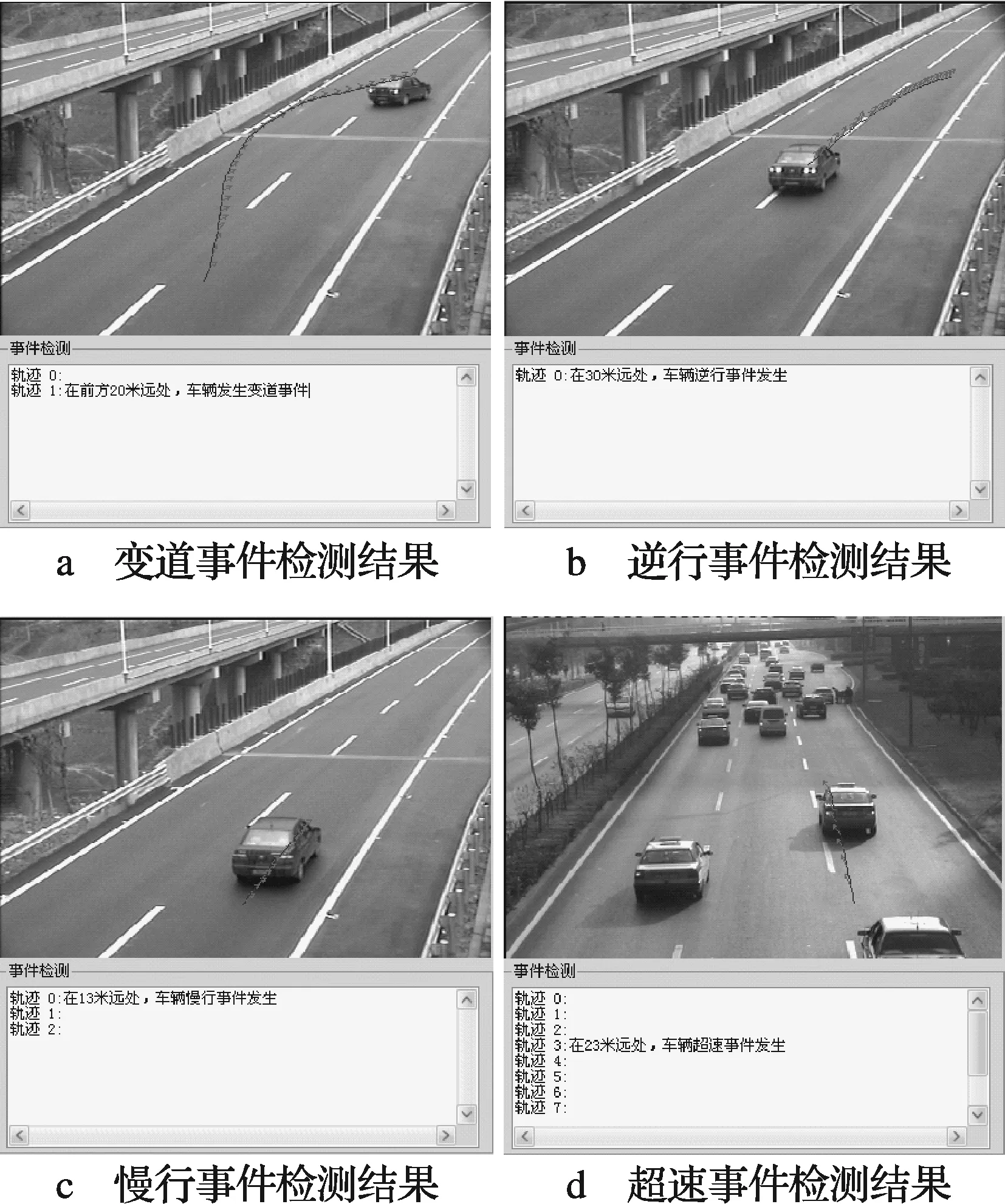
圖4 異常交通事件檢測(cè)結(jié)果
5 結(jié)論
本文采用在視頻圖像上建立正常車(chē)輛行駛的軌跡場(chǎng),通過(guò)當(dāng)前車(chē)輛軌跡矢量與軌跡場(chǎng)矢量相對(duì)比的方法,實(shí)現(xiàn)了對(duì)超速、慢行、逆行、變道等常見(jiàn)異常交通事件的檢測(cè)。實(shí)驗(yàn)表明,該方法算法簡(jiǎn)單,可以快速、準(zhǔn)確地檢測(cè)到異常交通事件的發(fā)生,有待在其他異常交通事件的檢測(cè)上進(jìn)一步應(yīng)用,以及在視角、天氣、車(chē)輛遮擋等可能導(dǎo)致目標(biāo)跟蹤丟失的交通場(chǎng)景下檢驗(yàn)其算法的普遍性。
[1] 徐楊,吳成東,陳東岳. 基于視頻圖像的交通事件自動(dòng)檢測(cè)算法綜述[J].計(jì)算機(jī)應(yīng)用研究,2011,28(4):1206-1210.
[2] KAMIJO S,MATSUSHITA Y,IKEUCHI K M,et al.Traffic monitoring and accident detection at intersections[J].IEEE Trans. Intelligent Transportation Systems,2000,1(2):108-118.
[3] MOHNHAUPT M,NEUMANN B. On the use of motion concepts for top-down control in traffic scenes[C]//Proc. Eur. Conf. Computer Vision.Antibes,F(xiàn)rance:[s.n.],1990:598-600.
[4] KUMAR P,RANGANATH S,HUANG Weimin,et al.Framework for real-time behavior interpretation from traffic video[J].IEEE Trans. Intelligent Transportation Systems,2005,6(1):43-53.
[5] 伍友龍. 基于圖像分析的高速公路交通事件檢測(cè)算法研究[D].長(zhǎng)沙:長(zhǎng)沙理工大學(xué),2005.
[6] YIN Hongpeng,CHAI Yi,YANG Xiaoyan. Fast-moving target tracking based on mean shift and frame-difference methods[J].Systems Engineering and Electronics,2011,22(4):587-592.
[7] SONG Huansheng,LU Shengnan,MA Xiang,et al. Vehicle behavior analysis using target motion trajectories[J].IEEE Trans. Vehicular Technology,2014,63(8):3580-3591.
宋煥生(1964— ),教授,博士生導(dǎo)師,從事基于機(jī)器視覺(jué)的交通感知及交通預(yù)警方面的研究。
責(zé)任編輯:任健男
青島海爾入股兆馳股份 布局智慧家庭生態(tài)圈
近日,青島海爾發(fā)布公告,擬出資3.7億元認(rèn)購(gòu)兆馳股份非公開(kāi)發(fā)行股份3 000萬(wàn)股。認(rèn)購(gòu)?fù)瓿珊螅鄭u海爾占兆馳股份屆時(shí)已發(fā)行股份總數(shù)的1.58%,將成為兆馳股份股東,雙方將在促進(jìn)U+戰(zhàn)略落地等方面開(kāi)展合作。
據(jù)了解,兆馳股份目前主要從事消費(fèi)類(lèi)電子產(chǎn)品生產(chǎn)等業(yè)務(wù),并擬由消費(fèi)類(lèi)電子制造向互聯(lián)網(wǎng)電視運(yùn)營(yíng)商轉(zhuǎn)型。
對(duì)于入股兆馳股份,海爾在公告中稱(chēng),此舉旨在“進(jìn)一步促進(jìn)海爾U+智慧生活戰(zhàn)略的落地,布局智慧家庭生態(tài)圈,提升用戶(hù)體驗(yàn),聚集用戶(hù)流量。”
Method of Detecting Traffic Incident Based on Vehicle Trajectory Field
LI Qianli1, SONG Huansheng1,2
(1.DepartmentofInformationEngineering,Chang’anUniversity,Xi’an710064,China;n>andTechniqueResearchCenterforRoadandTrafficDetection,Xi’an710064,China)
Currently the existing traffic incident detection algorithm has some disadvantages such as complex model, heavy computation. And the detection result has time lag. In this paper, a method of detecting traffic incident based on vehicle trajectory field is introduced. The method obtains the video-based vehicle tracking trajectory, establishes a normal vehicle trajectory field, then compares the current vehicle trajectory with the normal vehicle trajectory field and realizes the function of abnormal traffic incident detection such as over-speed, low running speed, changing lane, retrograde in the end. The results show that compared with the traditional approaches, this approach has simple algorithm and also can detect traffic incidents quickly and accurately.
video; trajectory field; traffic incident detection
【本文獻(xiàn)信息】李倩麗,宋煥生.基于視頻車(chē)輛運(yùn)動(dòng)軌跡場(chǎng)的交通事件檢測(cè)方法[J].電視技術(shù),2015,39(13).
國(guó)家“863”計(jì)劃項(xiàng)目(2014G3242005)
TN391.9
A
10.16280/j.videoe.2015.13.011
李倩麗(1989— ),女,碩士生,主研視頻檢測(cè)技術(shù)、圖像處理;
2014-12-04
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48