智能掃地車系統(tǒng)設(shè)計(jì)與研究
2015-10-15 09:15:06李雪艷
機(jī)電信息 2015年33期
李雪艷
(北京工業(yè)職業(yè)技術(shù)學(xué)院機(jī)電工程系,北京100042)
0 引言
隨著社會(huì)的進(jìn)步和科技的發(fā)展,智能機(jī)器人的應(yīng)用越來越廣泛,家用電器也逐漸走向智能化,如一些簡(jiǎn)單而實(shí)用的送料機(jī)器人、吸塵器、家居機(jī)器人、自動(dòng)掃地機(jī)器人等逐漸出現(xiàn)在人們的家庭生活中。未來智能家居機(jī)器人在人們的生產(chǎn)、生活中將起到巨大的作用,它將大大提高人們的勞動(dòng)效率,改善人們的生活水平。本文設(shè)計(jì)的基于單片機(jī)技術(shù)的智能掃地機(jī)器人集合了單片機(jī)、電子信息、控制技術(shù)、計(jì)算機(jī)、機(jī)械、傳感器、人工智能等諸多學(xué)科,有機(jī)地將吸塵器技術(shù)和移動(dòng)機(jī)器人技術(shù)融合起來,有力地滿足了普通室內(nèi)衛(wèi)生清掃以及危險(xiǎn)環(huán)境的清洗工作,是對(duì)掃地智能機(jī)器人的一個(gè)有效嘗試。
1 智能掃地車的總體方案設(shè)計(jì)
智能掃地車的主要構(gòu)件有:掃地功能設(shè)計(jì)、行走驅(qū)動(dòng)裝置、清掃裝置、垃圾收集裝置、傳感檢測(cè)裝置、爬壁裝置、電源裝置等,如圖1所示。
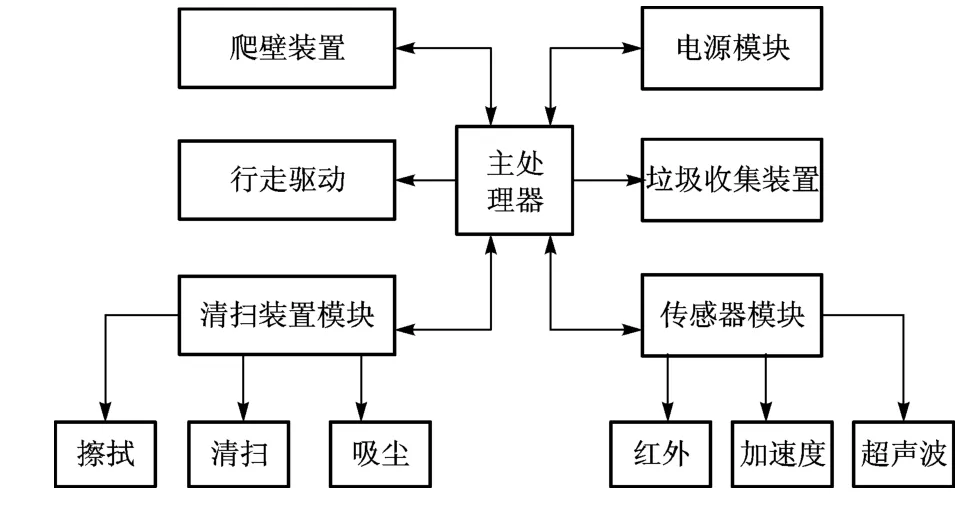
圖1 系統(tǒng)總體結(jié)構(gòu)圖
1.1 掃地功能設(shè)計(jì)
在智能掃地車的底盤前方,設(shè)計(jì)兩個(gè)轉(zhuǎn)向相反的都由直流減速電機(jī)驅(qū)動(dòng)的旋轉(zhuǎn)掃帚,使兩個(gè)掃帚的旋轉(zhuǎn)方向相反且都向內(nèi)側(cè)旋轉(zhuǎn),以便于垃圾的收集。
1.2 行走驅(qū)動(dòng)裝置
智能掃地車的行走驅(qū)動(dòng)采用的是電機(jī)帶動(dòng)驅(qū)動(dòng)輪行走的方式。驅(qū)動(dòng)輪安裝于智能掃地車的底盤后端處,前端裝上轉(zhuǎn)向裝置,驅(qū)動(dòng)輪和轉(zhuǎn)向裝置在單片機(jī)控制下由電機(jī)驅(qū)動(dòng),來實(shí)現(xiàn)平穩(wěn)前進(jìn)、后退和轉(zhuǎn)向等功能。這種行走驅(qū)動(dòng)主要是由兩個(gè)步進(jìn)電機(jī)和電機(jī)驅(qū)動(dòng)電路組成的。主處理器采用PWM控制方式,通過PWM控制可以方便地實(shí)現(xiàn)機(jī)器人的前進(jìn)和左右電機(jī)的調(diào)速,可以方便地實(shí)現(xiàn)機(jī)器人前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)、調(diào)頭等功能。
1.3 清掃裝置
在智能掃地車底部安裝吸塵器、軟毛刷、清潔布等清掃裝置,在掃地車行走過程中自動(dòng)依次進(jìn)行吸塵、掃地、擦地等工作,收集到的垃圾直接送進(jìn)垃圾收集裝置中,實(shí)現(xiàn)先掃后擦、深度清潔的目的。
1.4 垃圾收集裝置
垃圾收集裝置安裝于智能掃地車底部、緊挨清掃裝置的后方,它內(nèi)部安裝了具有吸塵功能[1]的吸塵風(fēng)機(jī),吸塵風(fēng)機(jī)可以造成垃圾收集裝置內(nèi)外的氣壓差,該氣壓差可配合及保障前端清掃裝置將垃圾直接送入垃圾收集裝置。
1.5 傳感檢測(cè)裝置模塊
傳感檢測(cè)模塊包括4個(gè)紅外傳感器、4個(gè)超聲波傳感模塊[2]和3個(gè)循跡傳感模塊,主要功能是用于避障、避懸崖、路徑循跡等等。(1)紅外傳感器。紅外傳感器安裝于智能掃地車的前方,它利用物體的反射性質(zhì)來探測(cè)機(jī)器人工作環(huán)境中的障礙物以避免碰撞。在一定范圍內(nèi),如果有障礙物,紅外線遇到障礙物,被反射到達(dá)傳感器接收頭,反之發(fā)射出去的紅外線,隨著傳播距離的增加而逐漸減弱,最后消失。當(dāng)傳感器檢測(cè)到障礙物信號(hào)時(shí),發(fā)送有障礙物信號(hào)給單片機(jī)處理器,單片機(jī)經(jīng)過一系列分析處理,驅(qū)動(dòng)機(jī)器人的驅(qū)動(dòng)輪來躲避障礙物。(2)超聲波傳感器。根據(jù)超聲波在不同媒質(zhì)的界面處會(huì)產(chǎn)生反射現(xiàn)象,超聲波傳感器可以測(cè)得智能掃地車與障礙物的距離信息。單片機(jī)采取中斷捕獲的方式,超聲波發(fā)射時(shí),單片機(jī)開始計(jì)時(shí),當(dāng)接收到反射波時(shí),停止計(jì)時(shí),測(cè)得的時(shí)間就是超聲波從發(fā)射到返回接收的時(shí)間間隔,根據(jù)波的傳輸公式可以計(jì)算智能掃地車與障礙物之間的距離。波的傳輸公式:S=(v×t)/2。其中,S為智能掃地車到障礙物的距離;v為超聲波在空氣中的傳播速度;t為單次單片機(jī)從超聲波發(fā)射到碰到障礙物返回并接收所經(jīng)歷的時(shí)間。(3)加速度傳感器。加速度傳感器用來測(cè)量智能掃地車在行走中的行走加速度和地面的傾斜度,此外,壁懸崖也可以用加速度傳感器來測(cè)量。
1.6 爬壁裝置
爬壁裝置安裝于智能掃地車的底部,當(dāng)掃地車完成高層建筑或高空玻璃作業(yè)時(shí),爬壁裝置開始工作。而進(jìn)行平地作業(yè)時(shí),掃地行走裝置工作。爬壁裝置由四對(duì)曲柄滑塊機(jī)構(gòu)組成的強(qiáng)力吸盤組成,吸盤之間用皮帶連接起來,根據(jù)對(duì)角線劃分,四對(duì)強(qiáng)力吸盤分成兩組,第一組松開后前進(jìn),另外一組保持吸附狀態(tài);同理,第二組松開前進(jìn)時(shí)第一組保持吸附。兩組之間交替進(jìn)行,實(shí)現(xiàn)智能掃地車的整體運(yùn)動(dòng)。
1.7 電源裝置
智能掃地車的電源不宜采取拖線的方式,因此必須為掃地車配上蓄電池,方便掃地車四處行動(dòng),因此,本系統(tǒng)采用鋰電池來為智能掃地車供電。鋰電池大致可分為兩類:鋰離子電池和鋰金屬電池。鋰離子電池不含有金屬態(tài)的鋰,并且是可以充電的。本智能掃地車配有雙節(jié)655085鋰電池電池組,兩路輸出,具有熱保護(hù)、帶過流保護(hù)、過充保護(hù)、欠壓保護(hù)功能。本智能掃地車除了配有鋰電池以外,還在頂部安裝有太陽能電池板,當(dāng)智能掃地車不工作時(shí),可以將其放在陽光下照射,將太陽能轉(zhuǎn)化為電能存儲(chǔ)于蓄電池中,以實(shí)現(xiàn)能源的綠色化、環(huán)保化。
2 智能掃地車的電路設(shè)計(jì)
2.1 智能掃地車的主體電控設(shè)計(jì)
本系統(tǒng)由一個(gè)STC89C51 40I-PDIP40單片機(jī)、四個(gè)紅外傳感模塊、一個(gè)超聲波模塊、兩個(gè)步進(jìn)電機(jī)、一個(gè)L298N驅(qū)動(dòng)芯片和一個(gè)細(xì)分器組成。通過單片機(jī)給細(xì)分器發(fā)送脈沖,細(xì)分器可控制步進(jìn)電機(jī)的運(yùn)動(dòng),步進(jìn)電機(jī)為清掃裝置提供工作的動(dòng)力,同時(shí)驅(qū)動(dòng)智能掃地車向前運(yùn)動(dòng)。超聲波模塊和紅外傳感器不斷檢測(cè)車前是否存在障礙物,加速度傳感器檢測(cè)前方是否有低洼或懸崖,當(dāng)檢測(cè)到障礙物或前方有低洼、懸崖時(shí),傳感器將反饋信號(hào)傳送給單片機(jī),從而實(shí)現(xiàn)自動(dòng)避障(避懸崖)[3-7]。
2.2 智能掃地車的驅(qū)動(dòng)控制設(shè)計(jì)
智能掃地車驅(qū)動(dòng)主要包括電機(jī)控制驅(qū)動(dòng)[8]、紅外傳感器驅(qū)動(dòng)和系統(tǒng)時(shí)鐘程序。(1)電機(jī)控制驅(qū)動(dòng)。智能掃地車上包含有兩個(gè)直流電機(jī)。它們由L298N驅(qū)動(dòng)芯片驅(qū)動(dòng),每個(gè)電機(jī)有M1+、M1-、M2+、M2-兩組控制線。當(dāng) Mx+為高電平、Mx-為低電平時(shí),直流電機(jī)正向轉(zhuǎn)動(dòng)(x表示電機(jī)的序號(hào))。反之,Mx+為低電平、Mx-為高電平時(shí),直流電機(jī)反向轉(zhuǎn)動(dòng)。Mx+與Mx-都為高電平或低電平時(shí),則電機(jī)停止運(yùn)轉(zhuǎn)。直流電機(jī)執(zhí)行驅(qū)動(dòng)任務(wù)時(shí),單片機(jī)根據(jù)電機(jī)需要正轉(zhuǎn)、反轉(zhuǎn)或停止給予不同的電平。(2)紅外傳感器驅(qū)動(dòng)。紅外傳感器的工作原理:實(shí)時(shí)檢測(cè)傳感器前方的障礙物到傳感器的距離,然后輸出一個(gè)距離的電壓函數(shù),驅(qū)動(dòng)程序完成電壓的測(cè)量,然后再經(jīng)一個(gè)12位的ADC轉(zhuǎn)化器將電壓信號(hào)轉(zhuǎn)化為距離信息。本程序采用三通道連續(xù)的轉(zhuǎn)換方式,三通道分別對(duì)應(yīng)前、后、左、右四個(gè)傳感器,每間隔1 s執(zhí)行一次。設(shè)置完成后啟動(dòng)轉(zhuǎn)換,然后等待觸發(fā)中斷。由AD轉(zhuǎn)換結(jié)果均值計(jì)算電壓值,參考電壓為3.3 V,AD位數(shù)為12 bit,根據(jù)逐次逼近式AD原理,電壓計(jì)算公式為:ADC_Voltage=Vfer/2b×ADC_AvlResualtx(x=1,2,3)。(3)系統(tǒng)時(shí)鐘程序。整個(gè)軟件系統(tǒng)的核心是系統(tǒng)時(shí)鐘,它控制所有程序的啟動(dòng)時(shí)機(jī)、模式切換節(jié)點(diǎn)及狀態(tài)保持時(shí)間等涉及時(shí)間判斷的機(jī)制。本系統(tǒng)時(shí)鐘軟件的時(shí)鐘源使用高階定時(shí)器TIM1。TIM1是高級(jí)控制定時(shí)器,它由一個(gè)可編程的預(yù)分頻器驅(qū)動(dòng),可以產(chǎn)生輸出波形或測(cè)量輸入信號(hào)的脈沖寬度。預(yù)分頻器選用RCC時(shí)鐘控制預(yù)分頻器和定時(shí)器預(yù)分頻器,可以實(shí)現(xiàn)波形周期和脈沖寬度從微秒至毫秒的調(diào)節(jié)。
2.3 電路設(shè)計(jì)
智能掃地車的電路設(shè)計(jì)中最重要的是循跡避障模塊,小車前方的循跡避障模塊不斷檢測(cè)小車正前方是否存在障礙物,當(dāng)檢測(cè)到障礙物時(shí),循跡避障模塊將信號(hào)反饋給單片機(jī),單片機(jī)發(fā)送驅(qū)動(dòng)信號(hào)驅(qū)動(dòng)步進(jìn)電機(jī)轉(zhuǎn)動(dòng),步進(jìn)電機(jī)通過正轉(zhuǎn)、反轉(zhuǎn)或者停止帶動(dòng)驅(qū)動(dòng)輪做相應(yīng)運(yùn)動(dòng),從而實(shí)現(xiàn)小車的避障。小車控制電路圖如圖2所示。

圖2 小車控制電路圖
3 結(jié)語
本文設(shè)計(jì)的智能掃地車,集掃地、擦地、清洗等功能于一體,解決了日常生活中地面上的垃圾問題,且在原行走驅(qū)動(dòng)模塊中增加了四對(duì)強(qiáng)力吸盤裝置,可與四只驅(qū)動(dòng)輪相互配合,既可在平地行走清掃,也可對(duì)垂直地面進(jìn)行作業(yè),如擦玻璃等,這樣也可以解決高層住戶玻璃窗臺(tái)不好擦洗的難題。同時(shí),小車頂部的太陽能電池板還可在陽光充足時(shí)對(duì)小車電池進(jìn)行充電,既節(jié)能又綠色環(huán)保,能使智能掃地車更好地為清潔工做出貢獻(xiàn)。
[1]馬翔,朱世強(qiáng),吳海彬.智能吸塵器的開發(fā)及設(shè)計(jì)[J].電子技術(shù)應(yīng)用,2000,26(8):6-8.
[2]劉喜昂,周志宇.移動(dòng)機(jī)器人的超聲模糊避障算法[J].微計(jì)算機(jī)信息,2004(1):31-32.
[3]魏兵,熊禾根.機(jī)械原理[M].武漢:華中科技大學(xué)出版社,2007:5-30.
[4]李金山,李琳,譚定忠.清潔機(jī)器人概述[J].中國科技信息,2005(5):18.
[5]王洪,銀金光.工程力學(xué)[M].北京:中國林業(yè)出版社,北京希望電子出版社,2006:175-300.
[6]鄭玉華.典型機(jī)械(電)產(chǎn)品構(gòu)造[M].北京:科學(xué)出版社,2004:230-400.
[7]鄧英劍,楊冬生.公差配合與測(cè)量技術(shù)[M].2版.北京:國防工業(yè)出版社,2008:25-241.
[8]賀紅林,趙淳生.機(jī)器人的超聲電機(jī)驅(qū)動(dòng)及其控制研究[J].壓電與聲光,2005,27(6):694-697.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04
