電力機車列車管預控壓力控制仿真研究
2015-10-17 00:26:39賀元玉王俊勇
鐵道機車車輛 2015年4期
賀元玉,王俊勇
(西南交通大學 機械工程學院,四川成都610031)
電力機車列車管預控壓力控制仿真研究
賀元玉,王俊勇
(西南交通大學 機械工程學院,四川成都610031)
列車制動系統是保證列車安全運行的關鍵技術,更加精確快速的控制列車管和制動缸壓力都對機車制動控制系統提出了更高的要求。以HXD2電力機車中使用的新型制動機為基礎,利用減壓閥、高速開關電磁閥、壓力傳感器、經典PID控制的方式,以AMEsim軟件為平臺搭建機車列車管預控壓力控制系統(即均衡風缸壓力控制),并分別仿真分析機車在充風緩解、初制動、全制動(制動區)、緊急制動4個關鍵制動工況下對列車管預控壓力的控制特性。
機車制動;均衡風缸;減壓閥;高速開關閥;PID控制;仿真
目前在我國高速、重載鐵路運輸發展進程中,以和諧系列電力機車為標志,已經廣泛使用以微型計算機為控制中心的第3代機車電空制動機。其通過在傳統空氣制動機基礎上添加中央處理單元、高速電磁閥、EP模塊等電氣控制部件,由制動控制單元(Brake Control Unit,以下簡稱BCU)計算發出制動動作指令,完成機車車輛的調速以及最終停車。第3代制動機實現了功能模塊的集成并且通過網絡通信完成指令及故障的迅速反饋。更加穩定精確的控制列車管、制動缸壓力的變化。
1 均衡風缸壓力控制系統機理分析
制動控制器(大閘)通過手柄驅動主軸,依靠齒輪傳動系統,帶動定位凸輪、開關凸輪,同時齒輪系統將驅動制動控制器內部的角位移傳感器主軸旋轉,使傳感器碼器輸出相應的電流信號(4~20 mA),以實現不同的制動控制指令輸出。BCU接收到對均衡風缸壓力要求通過控制電磁閥完成壓力調節,形成對列車管預控壓力的輸出。

圖1 自動制動控制原理圖
均衡風缸壓力調節模塊通過電磁閥,按照制動控制單元的目標值對來自總風缸的壓力空氣進行調節輸出,經過中繼閥流量放大后進入列車管,完成對列車管壓力的控制。如圖1所示。
2 減壓閥模型建立
減壓閥通過控制閥口的開度來改變節流面積從而使流體的流速以及動能發生變化,形成不同的壓力損失,完成降低通過減壓閥后介質壓力降低的功能。需要減壓閥保證出口壓力在一定的誤差范圍內保持穩定并且起到減壓和穩壓的作用。此處選用的是減壓閥為直動式減壓閥,即通過跳崖旋鈕直接來調節調壓彈簧的壓力來改變閥的出口壓力。其屬于常用膜片式減壓閥,結構如圖2所示。

圖2 減壓閥結構圖
2.1 力平衡方程
在調節減壓閥工作閥口開度大小的過程中,閥桿位移直接連接調壓彈簧與閥座之間的運動,從而形成與閥芯之間的工作閥口的調控。所以此處以閥桿為受力分析部件,如圖3所示,列出減壓閥內部力平衡方程:

圖3 運動部件力平衡示意圖
根據牛頓第二定律,可運動部件的運動方程可以寫為:

式中m為可運動部件質量,kg;h為閥芯開度,m;F1為調壓彈簧壓力,N;F2為復位彈簧復位力,N;Ff為摩擦阻力,N;A1為反饋壓力在膜片的有效作用面積,m2。
常用摩擦力經驗公式為:

其中

式中Ffc為靜摩擦力,N;Ffv為庫倫摩擦力,N;Ffs為粘性摩擦力,N;Bv為粘性摩擦系數,N·s/m;v為可運動部件運動速度,m/s。
2.2流量表達式
根據sanvilleF.E.的研究,實際氣動元件的流量可以用式(5)、式(6)計算得出。

其中

式中A1為減壓閥等效通徑的面積,m2;PM,Pd為元件上、下游壓力,MPa;TM為元件上游溫度,K;σ為壓力比;b為臨界壓力比,b=0.2~0.5;
2.3基于AMEsim減壓閥PCD建模
根據建立的數學模型以及對減壓閥內部結構原理的分析,此處利用基于物理模型化的AMEsim軟件對減壓閥進行PCD建模如圖4所示。
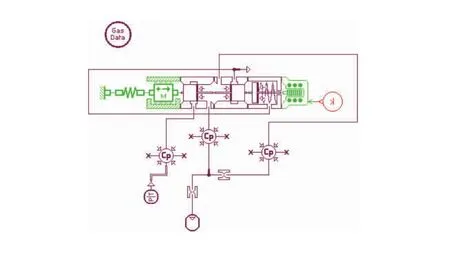
圖4 減壓閥PCD模型
主要參數取值見表1。
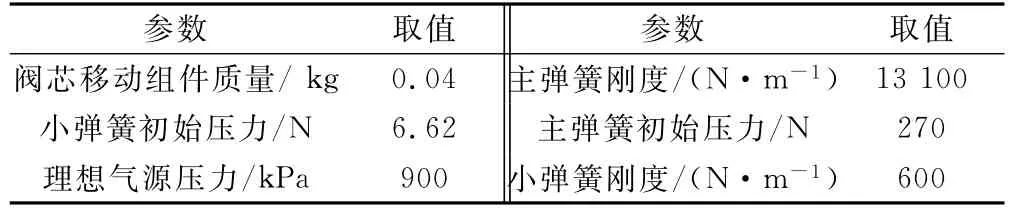
表1 減壓閥仿真模擬主要參數表
3 高速開關閥模型建立
本文所分析研究的空氣制動控制模塊中,對均衡風缸的壓力控制將以高速開關閥直接作為執行元件,通過高速切換完成精確壓力的輸出。此處將需要3種類型的高速開關閥實現這一功能,分別為常閉式二位二通電磁閥、常開式二位三通電磁閥以及常閉式二位三通電磁閥。
3.1開關閥功能模塊分析
根據電磁閥的特點,可以將其分解為4個子模型,無論何種模式的開關閥,其工作機理均由電、磁、機械、流體4大功能模塊有機聯系完成,各模塊之間的作用關系如圖5所示。
(1)當激勵前開關閥閥芯在彈簧復位力的作用下關閉閥口,關閉輸出閥口。
(2)在線圈感抗L和阻抗R的作用下使電磁線圈內電流逐步上升。同時引起電磁力F的變化完成電磁轉換。在初期由于F較小不足以克服阻力從而閥芯處于靜止,當電流增長到F足以克服阻力時閥芯開始運動,實現電—機械的轉換。
(3)當激勵撤除,線圈中電流逐步下降,但在初期彈簧復位力不足以克服電磁力F,當電磁力進一步減小小于彈簧復位力時,閥芯開始復位運動。

圖5 氣動高速開關閥功能模塊圖
3.2開關閥建模仿真
以二位三通電磁閥為例,模型根據對高速開關閥各功能模塊所用原理的分析,以A M Esim軟件為平臺建立如圖6所示模型。

圖6 二位三通常開電磁閥PCD建模
如圖所示,左側部分為電路以及磁路模塊,對BCU發出模擬信號進行電磁轉換,最終形成力的輸出完成對右側閥體動作的控制。

表2 高速開關閥主要仿真模擬參數
4 預控壓力控制系統建立
4.1PID控制原理
PID(比例—積分—微分)是一種線性控制器,在工業控制中廣泛應用。其實質為利用偏差,消除偏差。它根據給的目標值yr(t)與實際的輸出值y0(t)構成控制偏差e(t):

如圖3所示,整個PID控制系統由模擬PID控制器和被控對象組成,輸入輸出關系為:

其相應的傳遞函數為:

式中u(t)為控制器輸出的控制量;e(t)為偏差信號;Kp為比例系數;T1為積分時間常數;TD為微分時間常數。
4.2均衡風缸壓力控制系統結構分析
相對于HXD2機車通過單個兩位兩通常開電磁閥完成增壓的作用,采用如圖7所示的結構,通過兩位兩通、兩位三通電磁閥的重疊布置來提高緩解功能的穩定性,相互形成自動備用結構。工作狀態中兩電磁閥同時收到相同的來自BCU指令。兩者均正常工作時由電磁閥2來連通增壓氣路。當電磁閥2發生故障后,不需要BCU進行任何其他指令轉換,增壓功能自動由1、2電磁閥共同連通氣路進行實現。

圖7 均衡風缸壓力控制系統
緊急制動電磁閥在工作過程中必須常得電,直到接收到來自BCU的緊急制動指令后,常用制動電磁閥是在進行常用制動調速、停車過程中進行工作。同時,當常用制動電磁閥故障時,緊急排風電磁閥也可以作為冗余。壓力傳感器將輸出壓力反饋給BCU從而實現精確的閉環控制,當列車管出現泄漏等情況時,及時監控壓力變化,從而保證機車緩解制動性能的穩定。
根據圖7控制系統原理圖,使用前文所構造減壓閥、高速開關閥PCD模型并利用AMEsim軟件中PID控制模塊,搭建列車管預控壓力控制系統如圖8所示:
5 仿真結果分析
參照HXD2機車制動機工作性能實測參數,列車管緩解到定壓600 kPa用時t=10.3 s,穩定壓力值610.02 kPa;制動區實現階段減壓并且在全制動位列車管減壓170 kPa,壓力穩定值435 kPa;緊急制動列車管壓力從定壓降至40 kPa用時9.45 s。本文設置在列車管定壓為600 kPa模式下進行模擬仿真。PID主要參數設置為Kp=1.2,KI=0.007,Kd=0(選擇經典PID控制中的PI控制模式)。設置均衡風缸容積為0.6 d m3,理想氣源壓力為900 kPa,減壓閥穩定壓力值在650 kPa向緩解電磁閥進行供風,緩解電磁閥節流孔有效面積A1=0.85 mm2,制動電磁閥節流孔有效面積A2=0.4 mm2。
模擬機車在初制動、全制動(制動區)以及緊急制動模式下均衡風缸壓力控制曲線,以及在整個壓力調整過程中高速開關閥的動作曲線。

圖8 均衡風缸控制系統PC D建模圖
5.1充氣緩解—初制動(減壓50 kPa)
在本次模擬仿真當中從圖9所描述的仿真結果曲線可以看出:均衡風缸壓力從0恢復至目標壓力(定壓600 kPa),最終穩定在600.84 kPa,用時t=9.85 s,滿足均衡風缸恢復至定壓的時間小于9~11 s的要求。
初制動過程中均衡風缸按照目標設定減壓50 kPa,穩定值為550.9 kPa,用時t=2 s,滿足要求在減壓(50 ±10)kPa情況下用時小于2~3 s,并且在達到穩定值的前后制動電磁閥出現1次得失電調節,緩解電磁閥一直處于失電狀態。

圖9 初制動壓力變化以及電磁閥動作曲線
5.2制動區
當司機控制自動制動控制器由初制動位緩慢至全制動位時,要求均衡風缸能夠階段下降且能階段保壓,且在到全制動位時滿足減壓170kPa的要求。按圖1中設置目標壓力,仿真20s開始進行階段比例降壓,經過6s時間完成至全制動位,在整個過程中均衡風缸壓力可以嚴格按照目標壓力輸出,最后穩定為432kPa,滿足要求。可以看出在整個制動區,制動電磁閥根據目標壓力的連續變化,不斷做出壓力調整直至全制動位。

圖10 制動區壓力變化以及電磁閥動作曲線
5.3緊急制動

圖11 緊急制動壓力變化曲線
在緊急制動狀態下,通過BCU發出指令信號使得常用制動電磁閥以及緊急電磁閥同時得電,迅速排空均衡風缸中的壓力空氣,并且緊急電磁閥保持得電狀態,避免在制動過程中出現緩解情況發生。仿真得到當壓力降至39kPa經過時間t=9.4s,滿足在定壓600kPa時,9~11s內下降至40kPa以下的要求。
6 結束語
均衡風缸壓力響應直接決定著機車對列車管壓力的輸出,文中使用高速開關閥作為緊急、常用制動電磁閥,搭建重疊緩解模塊,同時利用減壓閥、經典PID控制實現了對均衡風缸壓力的控制。利用機車BCU發出模擬制動指令信號,通過高速開關閥的快速響應,以小流量的方式迅速調節輸出壓力,達到列車管目標壓力預控值。同時,通過對所搭建模型在充氣緩解、初制動、全制動(制動區)、緊急制動等關鍵制動工況下的列車管輸出壓力進行仿真,仿真結果滿足我國關于電力機車制動機的技術要求,同時與HXD2機車實際運行工況下性能參數以及壓力變化過程相符合,具有壓力穩定值與目標值誤差小,輸出信號穩定,電磁閥動作響應快速等特性,能夠為列車管壓力控制的研究提供一定的理論基礎。
[1] TB 2056-89,電力機車制動機技術條件[S].
[2] 王俊勇,仝 雷,王海平.HXD2電力機車制動系統[J].機車電傳動,2008,(5):8-14.
[3] 王俊勇.準高速D F11機車制動系統研究與分析[J].西南交通大學學報,1997,32(6):637-642.
[4] 王俊勇,張 昕.動車組制動系統技術分析探討[J].鐵道車輛,2005,43(2):22-24.
[5] 周 浩,王樹海,仝 雷.HXD2大功率交流傳動電力機車空氣管路與制動系統[J].機車電傳動,2008,(5):15-18.
[6] 黃友銳,曲立國.PID控制器參數整定與實現[M].北京:科學出版社,2010.
[7] 黃維綱,王旭永,王顯正,鐘廷修.高速開關電磁閥開關特性的機理研究[J].上海交通大學學報,1998,32(12):38-41.
Simulation and Study on the Control of Electric Locomotive Brake Pipe Pre-control Pressure
HE Yuanyu,WANG Junyong
(School of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031 Sichuan,China)
The locomotive brake system is the key technology to ensure the safety of train operation,and precise and rapid control of the pressure of brake pipe and brake cylinder also puts forward higher requirements to the brake control system.In this paper,based on a new type brake widely applied on HXD2 loco motive,using relief valve,high-speed switch valve,pressure sensor,and classic PID control mode,a brake pipe pressure control system is built,and the control behavior of the loco motive in the situation of brake release,first pressure drop,brake application and emergency brake is simulated and analyzed.
loco motive brake;equalizing reservoir;relief valve;high-speed switch valve;PID control mode;simulation
U264.331+9
A doi:10.3969/j.issn.1008-7842.2015.04.09
1008-7842(2015)04-0040-05
9—)男,碩士研究生(
2015-01-31)
