淺談綜采工作面刮板機技術(shù)管理
2015-10-17 01:39:10徐希剛
現(xiàn)代工業(yè)經(jīng)濟和信息化 2015年23期
徐希剛
(琿春礦業(yè)(集團)公司安管部,吉林琿春133300)
?
淺談綜采工作面刮板機技術(shù)管理
徐希剛
(琿春礦業(yè)(集團)公司安管部,吉林琿春133300)
由于刮板輸送機受地質(zhì)條件影響,經(jīng)常發(fā)生上竄下滑現(xiàn)場導(dǎo)致刮板機輸送機與轉(zhuǎn)載機搭接不合理,經(jīng)過科學(xué)的計算與實際的考察,改變刮板機偽傾角角度、改變推溜工藝、利用外力控制等方法,有效控制刮板輸送機運動狀態(tài)。
上竄下滑;偽傾角;受力合力
1 概況
刮板輸送機是綜采工作面配套設(shè)備,主要承擔(dān)工作面運煤任務(wù),但由于工作面環(huán)境的復(fù)雜性等因素,往往造成工作面刮板輸送機上竄或者發(fā)生下移等狀況,導(dǎo)致刮板輸送機與轉(zhuǎn)載機搭接不良或者搭接過度等現(xiàn)象,使得工作面運煤系統(tǒng)不暢通,工作面安全出口不符合規(guī)定等實質(zhì)性問題,嚴重制約原煤生產(chǎn)工作。
2 刮板輸送機運動的原因
從力學(xué)方面分析,將刮板輸送機想象成一個剛性整體,我們可以得知刮板輸送機的受力情況,假設(shè)剛性成體的重力為m g,當工作面傾角為0°時,輸送機受垂直向下的重力,以及反作用力,刮板輸送機受到的合力為0,所以刮板輸送機保持靜止狀態(tài)。但在實際復(fù)雜采場條件制約下,綜采工作面上、下順槽存在一定的高差,這使得工作面存在一定的傾角,刮板機受到了延工作面向上的摩擦力m gcosφ以及向下滑動的重力分力m gsinφ。從而導(dǎo)致工作面受到的合力不為0,當上順高于下順時,當工作面刮板輸送機受到的合力向下時,輸送機有向下竄動的趨勢;反之輸送機將有向上竄動的趨勢。
從生產(chǎn)工藝方面分析,當采煤工人違規(guī)操作推移刮板輸送機始終有一個方向向另一個方向推移,也會使刮板輸送機位置發(fā)生變化。當工作面始終保持有機頭向機尾推移刮板輸送機時,輸送機則有向機尾移動的趨勢,反之則有向機頭移動的趨勢。
知道溜子上下竄動的原因,結(jié)合工作面采場的實際條件,我們就可以控制溜子的移動趨勢,從而保證刮板輸送機與轉(zhuǎn)載機的搭接程度。
3 控制刮板輸送機上竄下滑幾種常見的方法
1)當工作面上、下順存在一定的高差時,工作面存在一定的傾角,使得工作面刮板輸送機處于運動狀態(tài)。這時我們可以調(diào)整工作面,使工作面存在一定的偽斜角度,將輸送機所受到的合力反向分解,使得刮板機運動的下滑量與偽傾斜向上運動的量相抵消,從而到達了控制刮板輸送機的目的(如圖1所示)。通過經(jīng)驗公式可知,一般偽傾角是傾角的1/2,也就是說上下的錯距是上下順高差的1/2。當工作面下順高于上順時,工作面刮板輸送機有整體向下的趨勢,我們可以將上順超前于下順一定的距離,工作面制造偽傾角,控制輸送機的運動趨勢。
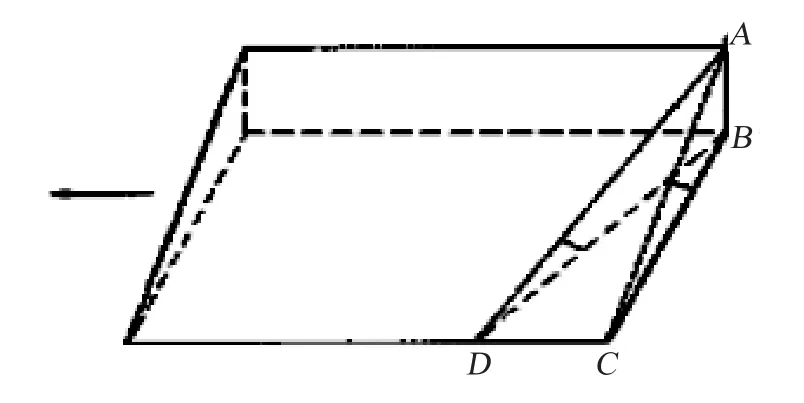
圖1 偽傾角控制刮板機示意圖
2)改變生產(chǎn)工藝來控制刮板輸送機移動。當工作面上、下順存在一定的高差時,工作面存在一定的傾角,使得工作面刮板輸送機處于運動狀態(tài)。在工作面認為制造一定偽傾角的同時,改變生產(chǎn)工藝,打破正常的推溜方法。當工作面刮板輸送機存在向下運動的趨勢時,可以改變推溜順序,始終保持由下向上推溜的方法,反之始終保持由上向下推溜的方法。
3)借助外力方法控制刮板輸送機。當工作面上、下順存在一定的高差時,工作面存在一定的傾角,使得工作面刮板輸送機處于運動狀態(tài)。在調(diào)整工作面?zhèn)蝺A角、改變刮板機推移工藝的同時,可以采用外力控制刮板機運動,當刮板機向下運動時,將輸送機頭處用兩個單體戧住,動刮板機向上運動時,則可以將刮板機尾采用兩個單體戧住。同時也可以設(shè)計支架與刮板機連接裝置,利用液壓支架,控制刮板機運動。
4 刮板輸送機上竄下滑的幾種假象
1)由于采場煤層賦存原因,導(dǎo)致掘進送到時,兩順槽不能完全成為一條直線,使得刮板輸送機頭、尾與巷幫距離發(fā)生變化,表面看好像刮板機運動,實質(zhì)指示巷道變化原因,實際沒有變化,此時不要貿(mào)然采取以上方法。
2)工作面煤層層理發(fā)生變化,或者是工作面過特殊地質(zhì)構(gòu)造地帶,使得工作面內(nèi)不成一條直線,工作面出現(xiàn)“鼓肚”、“凹坑”等現(xiàn)象,導(dǎo)致工作面刮板輸送機頭、尾發(fā)生了變化,此時不要貿(mào)然采取控制輸送機方法,應(yīng)該結(jié)合現(xiàn)場實際條件,采取加刮板機槽子、加支架處理。
5 管理刮板輸送機的心得體會
1)因為刮板機運動具有滯后性的特點,當發(fā)現(xiàn)刮板機運動了在進行處理就來不及了,管理刮板輸送機一定要超前控制,對工作面上下順前50m內(nèi)巷道的標高進行掌握,當兩順槽的高度差發(fā)生變化時,工作面?zhèn)蝺A角就應(yīng)該隨即調(diào)整。
2)當刮板輸送機運動后,采取調(diào)整偽傾角控制刮板輸送機時,一定要適度,切莫大抹大推,以防止工作面刮板輸送機反向運動,最后難以控制。
6 有效控制刮板輸送機的實際應(yīng)用
由于煤層賦存原因,使得工作面有時會進行轉(zhuǎn)角開采或則是工作面對接等工程,由于我們掌握了工作面控制輸送機的方法,從而有效的完成工作面大型的改造。
例如:由于煤層賦存等方面原因,12008綜采工作面回采推進至經(jīng)緯W507點前19.02 m時,工作面經(jīng)過改造擴寬43.66 m,工作面擴寬地帶為開切眼,安裝支架,工作面調(diào)寬處理,改造巷內(nèi)安裝支架30部。為了保證工作面對接合理,減少因?qū)舆^度或則不良而衍生出來的其他工作量,必須對刮板機進行調(diào)整。當工作面距離對接點20m時,經(jīng)過測量,刮板機輸送機尾與對接點間距為1.5 m,從而必須將刮板輸送機向上調(diào)整1.2 m,經(jīng)過區(qū)隊的合理施工,最終工作面對接順利完成,有效地保證了12008工作面的正常開采。
7 結(jié)語
如果我們將刮板輸送機位置以及運動狀態(tài)掌握好,有助于工作面運煤系統(tǒng)保持暢通,工作面上隅角的管理,控制好尾巷瓦斯積聚等系列問題以及一些大型生產(chǎn)準備提供可靠的理論依據(jù),從而有效地保證了原煤生產(chǎn)。
(編輯:劉楠)
On the Fully Mechanized Coal Face Scraper Technology Management
Xu Xigang
(Hunchun Mining(Group)Company Security Management Unit,Hunchun Jilin 133300)
Due to the scraper conveyor by the geological conditions,often resulting in channeling decline scene scraper conveyor and loader lap unreasonable,through scientific calculation and the actual inspection,change scraper pseudo inclination angle change push slip process control methods such as the use of force,effective control of the scraper conveyor motion.
upward decline;pseudo inclination;resultant force
TD528.3
A
2095-0748(2015)23-0025-02
10.16525/j.cnki.14-1362/n.2015.23.10
2015-10-25
徐希剛(1964—),男,吉林蛟河人,大專,畢業(yè)于遼源煤校采礦工程專業(yè),現(xiàn)任琿春礦業(yè)(集團)公司安全監(jiān)管部總工程師,研究方向:采煤、掘進、安全。
