條煙傳輸控制儀的設計與應用
2012-07-06 08:11:10萬二平
科技傳播 2012年7期
葉 波,萬二平
重慶大學機械工程學院,重慶 400030
0 引言
系統自動化已經成為提高煙草企業自動化水平和管理水平的重要手段。在煙草物流自動化[1-2]中,條煙儲存輸送系統是重要的機械設備之一。近十年來條煙傳送技術也在不斷發展,這為條煙的封裝也進一步提供了便利。目前國內外都已把機電一體化技術應用到煙草加工行業里,特別是PLC[3-4]技術的應用日益廣泛。
筆者針對一家煙草公司實際生產中的項目要求,為了解決條煙輸送中的偏斜后如何擺正以及條煙豎立后如何使其臥置等問題,提出了一套解決方案,此方案中主要使用的就是PLC程序來控制整個系統,來使條煙正確地進入包裝箱,經過實驗,證明其方案可行。
1 控制儀的安裝
將儀器固定在包裝機傳送帶上方前后兩個鋁型材方柱上。

圖1 條煙傳送控制儀整體框架圖
2 控制儀的控制方案
2.1 斜煙傳送定位控制方案
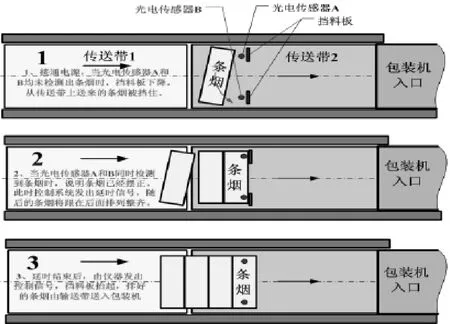
圖2 斜煙傳送定向控制說明圖
1)儀器設有兩個擋料板,一邊一個,同步動作。工作過程參看圖2的1、2、3說明;
2)傾斜條煙的一邊被擋料板擋住,然后在運輸帶作用下將其推移到正確位置。用A、B兩個光電傳感器[8-10]檢測條煙是否來到,當A、B同時接通時,說明條煙已經擺正;
3)當A、B傳感器同時接通時發出指令,開始按預定的時間延時(1s~10s可調整),在此期間后續的條煙將排列整齊,延時結束擋料板提起,條煙傳送到包裝機入口。
2.2 豎煙翻轉調整方案
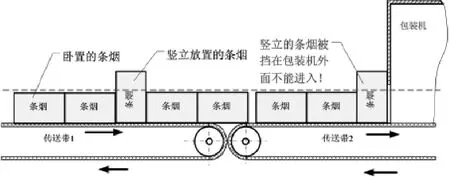
圖3 豎直條煙處理必要性的說明圖
2.2.1 豎煙翻轉調整的必要性
通過現場考察發現,在條煙在進入包裝機前的輸送過程中,除條煙傾斜進入引起包裝機故障及打壞條煙的問題外,還存在另外一個問題。即設備要求條煙送入包裝機應保持“臥置”狀態。但總有少部分條煙在傳送過程中出現“豎立放置”的情況,從而被擋在包裝機入口之外,必須靠工人把它們改成臥置。這樣不但增加了工人的勞動量,同時還影響生產效率。因此,研制能發現豎立放置的條煙,并自動翻轉使其成為臥置的“條煙翻轉裝置附件”是十分必要的。
2.2.2 豎煙翻轉調整方案
1)裝置由電磁旋轉機構F、擋桿、撥桿、微動開關E和光電傳感器C等組成;
2)工作狀態1為正常工作位置。如果出現條煙豎立,當隨傳送帶移至擋桿時將被擋住而不能移動,此時微電腦接收從微動開關E發出的指令而產生預定的延時,在此期間前面的條煙已經隨傳送帶走出一段距離,為翻轉該豎立條煙創造了條件;延時結束進入工作狀態2,微電腦控制電磁旋轉機構F反時針快速轉動固定角度,撥桿打在豎立條煙的背部而被翻轉成為臥置狀態,然后該旋轉機構馬上返回狀態1的正常位置,為翻轉后面來的豎立條煙做好準備。
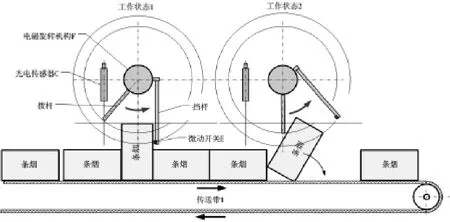
圖4 豎煙翻轉調整原理說明
2.2.3 特殊情況的處理
偶爾會出現兩條煙并排豎起的特殊情況,這時如果電磁旋轉機構工作將可能損壞條煙,這是不允許的。為此專門設置了一只光電傳感器C,用來檢測當豎立的條煙被擋桿擋住時,是否后面緊跟著又有一條豎立條煙? 出現這種情況后,微動開關E、和光電傳感器C將同時接通,微電腦通過邏輯判斷,將指示電磁旋轉機構F不動作,并發出報警信號,通知工人前來處理。
3 PLC控制程序說明
為了提高系統可靠性和減小控制儀的體積、增加系統調整的靈活性,系統采用步進電機[11-13]作為旋轉機構的電機,并采用三菱PLC作為控制中心。PLC控制程序如下。
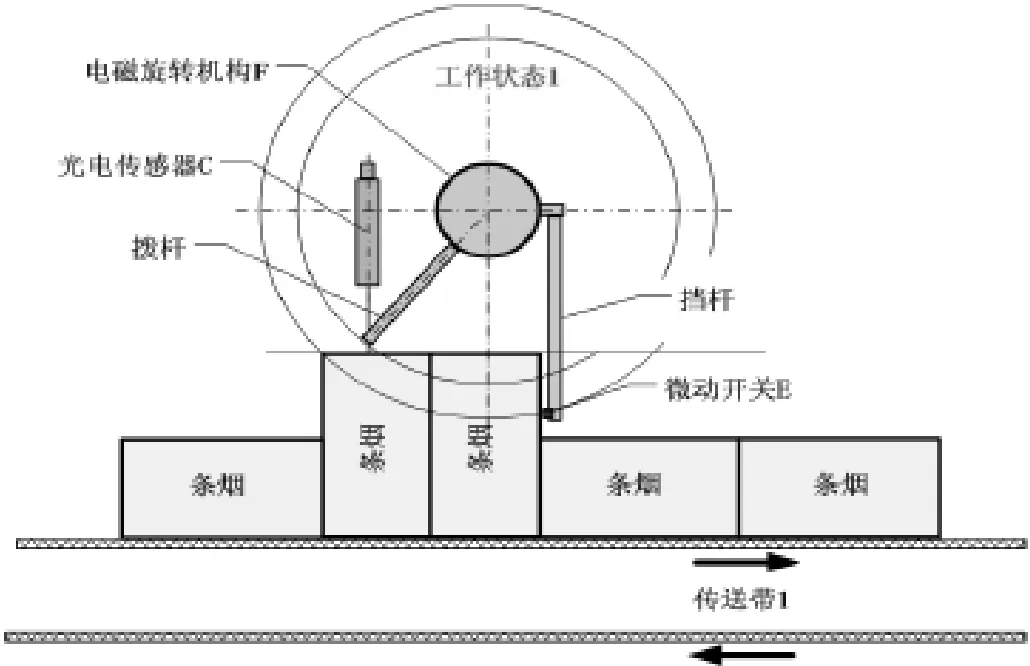
圖5 特殊情況處理說明圖
3.1 斜煙定向調整程序(如圖6所示)
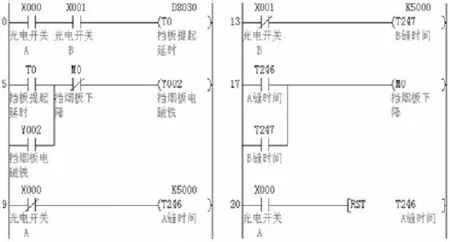
圖6 斜煙調整PLC梯形圖
3.2 豎煙調整程序(如圖7所示)

圖7 豎煙調整PLC梯形圖
4 PLC外設元件和接線圖
如圖8所示。控制儀包括豎煙調整和斜煙定向調整兩個控制箱。圖中綠線框內的元件在豎煙調整控制箱中,綠線框外的元件在斜煙調整控制箱中。三菱PLC和系統電源在豎煙調整控制箱中。兩個控制箱之間通過航空插座和電纜連接。
5 結論
系統采用三菱PLC對條煙傳輸過程實施自動控制,使傾斜的條煙自動對齊,豎立的條煙自動臥倒,有效地避免了條煙包裝中常常出現的打壞條煙的故障。實踐證明系統調整方案和系統結構是合理的,對條煙包裝線是一種良好的技術進步。
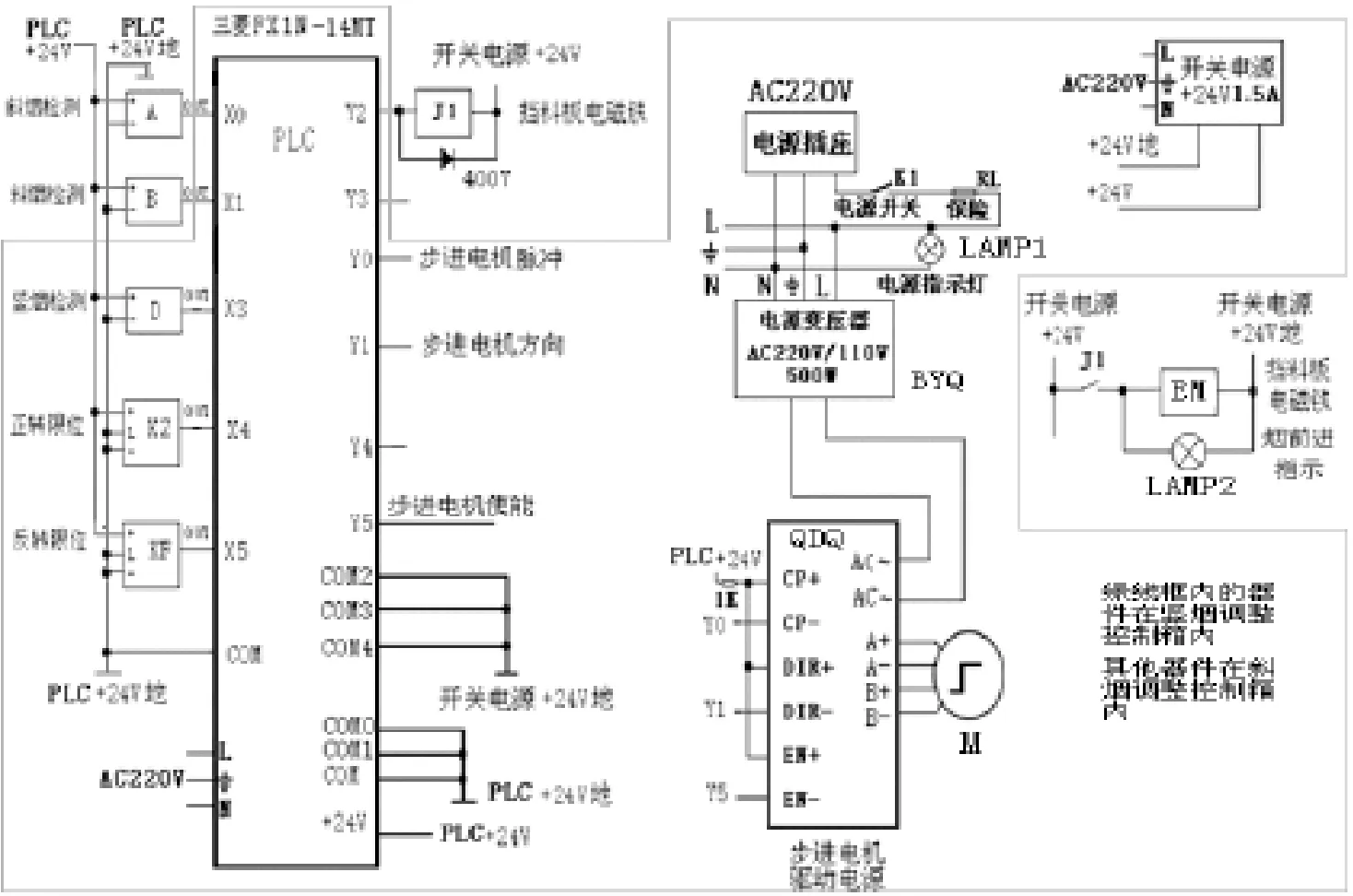
圖8 外設元件和接線圖
[1]程凌.一種多功能智能化條煙檢測裝置設計與應用[J].電工技術學報,2007,4:9-10.
[2]胡雪峰.封裝機條煙輸入方式的探討[J].煙草科技,2005,9:18-19.
[3]孫莉莉.西門子S7-200PLC在卷煙機烙鐵控制系統中的應用[J].自動化應用,2010,10:35-36.
[4]孫城,俞立,等.煙草全自動分揀系統的PLC控制[J].自動化儀表,2005,11:65-66.
[5]CHANG-KEUN P,JDD-MYUNG K,MI-JUNG C,et al.Definition of common PLC MIB and design of MIB Mapper for multi-vendor PLC network management[C]//IEEE International Symposium on Digital Object Identifier,Oct 11,2008,Power Line Communications and Its Applications,2008:152-157.
[6]SHUTING Z,Z YANG.A high performance architecture design of PLC dedicated processor[C]//3rd International Conference,Aug 20-22,2010,Ind.Inf.Lab.,Chinese Shuting Zeng,Zhi Yang.A high performance architecture design of PLC dedicated Acad.of Sci.,Shenyang,China 2010,2 :424-428.
[7]IN-SUNG J,MULMAN,B.M.,et al.PLC control logicerror monitoring and preditction using neural network,Oct 18-20,2008,Dept.of Ind.Eng.,Ajou Univ.,Suwon,2008,2:484-488.
[8]Kh.S.KARIMOV,I.QAZI,T.A.KHAN.Low temperature properties of organic-inorganic Ag/p-CuPc/n-GaAs/Ag photoelectric sensor[J].Science in China.Series E,Technological sciences,2008,51(2).
[9]KIN S C,QUNQI L,YUNJIANG R.Optical sensing based on light coupling between two parallel long-period fiber gratings[J].Photonic sensors,2011,1(3):204-209:
[10]LEI Z,JING Y L,LI M T.Micro/nanofiber optical sensors[J].Photonic Sensors,2011,1(1):31-42.
[11]SHI J,ZHANG H M,LIU X.Novel integrated position measurement unit for stepping motor servo control[J].Measurement,2011,44(1) :80-87.
[12]MAKOTO Y,HIDEO D.Wide range drive of hybrid stepping motor with flux-weaking control[J].Electrical Engineering in Japan.2011,174(4):68-74.
[13]MASI,A.,C,G.,LOSITO,R.,MARTINO,M.DSP-based stepping motor drivers for the LHC collimators[J].IEEE T NUCL SCI,2008,55(1):341-348.
猜你喜歡
奧秘(創新大賽)(2023年3期)2023-05-06 01:48:20
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
浙江中西醫結合雜志(2017年2期)2017-01-12 18:23:59
當代化工研究(2016年9期)2016-03-20 16:22:08
聲屏世界(2014年6期)2014-02-28 15:18:09