基于虛擬儀器和藍牙技術的線陣CCD圖像采集系統
2015-10-20 02:39:26許林林重慶大學物理學院重慶401331
網絡安全與數據管理 2015年10期
許林林,汪 濤(重慶大學 物理學院,重慶 401331)
基于虛擬儀器和藍牙技術的線陣CCD圖像采集系統
許林林,汪濤
(重慶大學物理學院,重慶401331)
采用ST公司生產的STM32F103系列主控芯片,該系列芯片能夠產生系統所需要的驅動線陣CCD的時序信號,通過藍牙技術進行數據傳輸,使用虛擬儀器編程軟件LabVIEW進行上位機軟件開發,從而能夠完整地做出所要求的一個線陣CCD圖像采集系統。該系統可以實現藍牙無線數據方式采集,軟件界面的開發時間縮短,操作性強。
STM32;線陣CCD;藍牙技術;LabVIEW;數據采集
0 引言
傳統的數據采集方式基本上是以有線的方式連接,線多且亂,有時會造成不必要的損失,而且使用大多基于C或C++的軟件界面,操作起來不易,開發時間比較長,功能上不能往外擴展。電荷耦合器件(Charge Couple Device,CCD)[1]已經在非接觸測量領域和傳感領域得到了應用,這種器件從20世紀60年代發展而來,具有很多優點,比如精度高、功耗低、尺寸小,壽命長等。在某一個有關于CCD的系統中,CCD的驅動時序要求是很重要的,影響著CCD的信噪比等特性,而像EPROM驅動、單片機驅動、IC驅動以及PLD驅動存在著很多缺點,比如調試困難、邏輯設計復雜、驅動頻率低[2],所以CCD驅動是所要考慮的。上述的這些問題是該系統所要解決的主要問題,也正是因為這些問題的要求,才設計出了這樣的一個系統。
根據上述所提出的問題,采用藍牙技術來實現無線數據傳輸,它具有很多優點,如功耗低、成本低、傳輸速率高、穩定性強、安全性高、使用便捷,關鍵是目前智能手機也都自帶藍牙功能。而其他的無線技術,比如WIFI,雖然傳輸速率高,但是安全性不夠;ZigBee技術耗能低、低成本但傳輸速率不高[3]。所以綜合以上考慮,使用藍牙適配器作為無線傳輸方式。
CCD驅動方面繼承了實驗室經常使用的ARM芯片,該芯片不止作為驅動芯片,也是整個系統的“大腦”,承擔著核心的作用,此芯片是ST公司生產的STM32F103系列,選用它主要因為其產生的驅動時序穩定、精確。對于界面開發,選用了LabVIEW作為編程開發軟件,它是虛擬儀器的軟件開發工具,虛擬儀器在國內已經比較成熟,而且它是一種圖形化編程語言,是未來編程語言的發展趨勢,具有很多優點,關鍵是強大的擴展功能是所需要的。
1 整體方案設計
系統主要由ARM處理器STM32F103、電平轉換、線陣CCD、濾波放大電路、A/D轉換及藍牙傳輸模塊等組成。此圖像采集系統的基本工作步驟是:首先微處理器芯片產生CCD所需要的4種驅動脈沖信號,使CCD能夠正常工作,然后CCD的光敏單元部分采集到光信號,并且輸出的是模擬信號,為了得到數字信號,必須經過放大處理然后輸入到A/D轉換當中,微處理器讀取數字信號結果并且存入到自己的存儲器當中,當這樣一幀數據接收完成之后,經過串口將數據送入上位機當中處理[4]。系統框架如圖1所示。
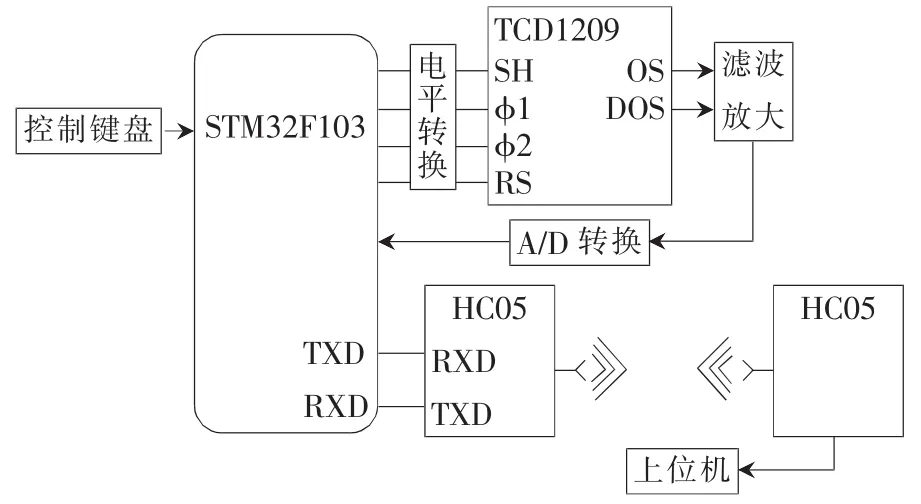
圖1 系統框架
2 系統硬件組成
2.1藍牙模塊的選擇
采集模塊選用的是藍牙模塊HC05,這個模塊是實驗室經常使用的,在資料和調試上是非常成熟的。這塊藍牙器件的數據傳輸率范圍極廣,基本上在4 800b/s~1 382 400b/s之間,電壓精度要求不高,一般的單片機系統電壓是可以兼容的,此款藍牙可以與電腦、手機等智能終端配對。表1展示了所使用的藍牙部分參數。
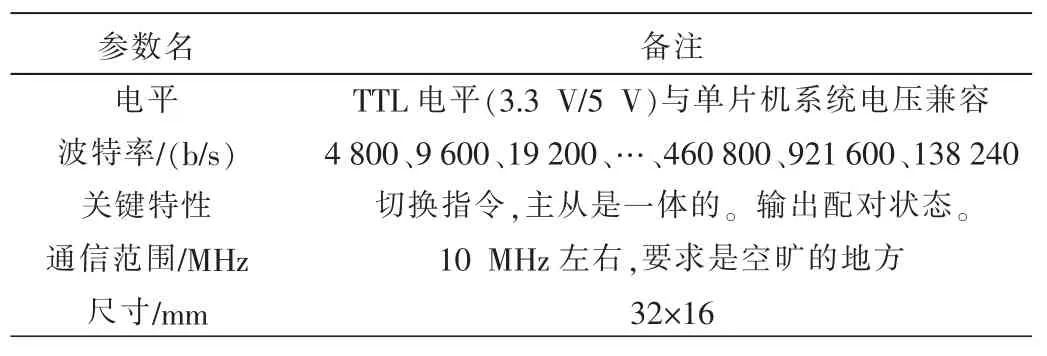
表1 藍牙基本特性
2.2微處理器的選擇
根據系統的需要,整個測量系統的控制,對于采集信號的調理和轉換,與上位機之間的通信以及藍牙適配器的連接,對于傳感器CCD的驅動控制,選擇了由ST(意法半導體)公司出產的一款ARMv7-M架構的32位微處理器。它的內核是Cortex-M3,該處理器非常高效,功耗低,實時性能好,而且價格便宜。根據提供的數據資料可以知道該款微處理器最大的工作時鐘頻率達到了72MHz,滿足系統的實時性要求。它具有128KB閃存,20KB靜態RAM,滿足圖像采集系統的要求。它具有基本的32位Thumb-2指令集架構。此器件在整個的設計上解決了很多的問題。
2.3線陣CCD驅動設計
在CCD驅動設計上,選擇了經常使用的TCD1206SUP,該CCD傳感器價格上比較便宜而且滿足要求。此器件的驅動電壓脈沖是兩相5V,有效像元數為2 160個,滿足了實際需求,每一行的輸出像元是2 236個。根據數據每一個是14μm×14μm,有效總長度為30.24mm。
此款CCD器件TCD1206SUP需要4路驅動信號,由上述微處理器STM32F103系列來產生滿足需求的時序,包括:兩相電荷轉移脈沖、復位的脈沖RS以及所要的光積分脈沖SH。圖2是波形圖。
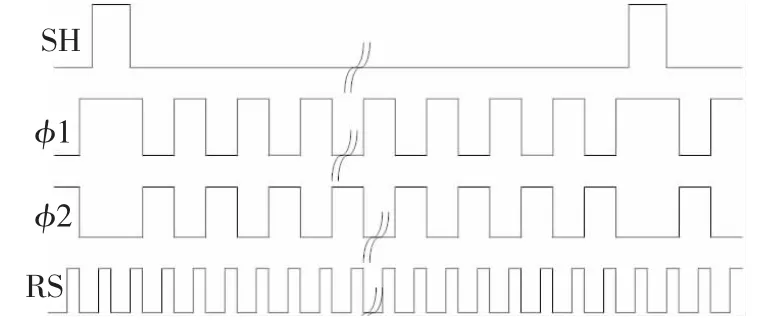
圖2 CCD驅動波形
由圖2可以解讀出當在SH下降沿時,φ1、φ2各自保持為高低電平交替存在,當光積分脈沖是處在高電平期間時,驅動脈沖φ1是高電平,φ2是低電平狀態的。這樣的驅動時序是為了保證在光敏區間的采集信號能夠完完全全地轉移到CCD這樣一個模擬移位寄存器當中,這是關鍵所在。但是在控制SH的電平時間上一定要把握住其時間上的要求,因為如果SH的高電平時間過長的話,那么信號轉移到模擬移位寄存器里的信號將不僅是有效信號,而且還有少量的噪聲信號[5],這將嚴重影響有效信號的獲取。實際上噪聲信號的多少主要取決于所設置的這個SH在高電平上的時間長短[6]。通過以上來看,時間長短是必須注意的地方。
2.4A/D轉換
其實在STM32F103系列處理器的內部是有A/D轉換模塊的,但是由于CCD驅動頻率為1MHz、500kHz、250kHz,當微處理器工作頻率達到72MHz時,A/D轉換速度卻達不到1MHz,所以需要一個外部的A/D芯片。經過提供的數據資料分析,采用了AD9945信號處理器。采用AD9945的原因是其采用了40MHz單通道架構,設計主要是為了用于采樣、調節交錯和對逐行掃描區域CCD陣列的輸出。它的內部寄存器部分使用的是串行接口。AD9945的組成部分包括:CDS(相關雙采樣)、VGA(數字控制增益放大器)、ADC(12位模數轉換器)以及黑色電平鉗位電路[7]。它是由3V電源供電,功耗典型值大約為140mW,封裝形式是采用32引腳的LFCSP。
3 硬件系統軟件設計
TCD1206SUP的SH、φ1、φ1和RS這些驅動時序信號分別是由微處理器STM32F103的TIM1_Channel1、TIM2_Channel1、TIM2_Channel2和TIM3_Channel1這些定時器通道產生的,其中高級定時器TIM1在PWM_1模式工作,而通用定時器TIM2在翻轉模式工作,通用定時器TIM3工作在PWM模式。把TIM2的翻轉頻率設置為0.5MHz,TIM2_Channel1和TIM2_Channel2的輸出極性相反,TIM3的工作頻率為1MHz。
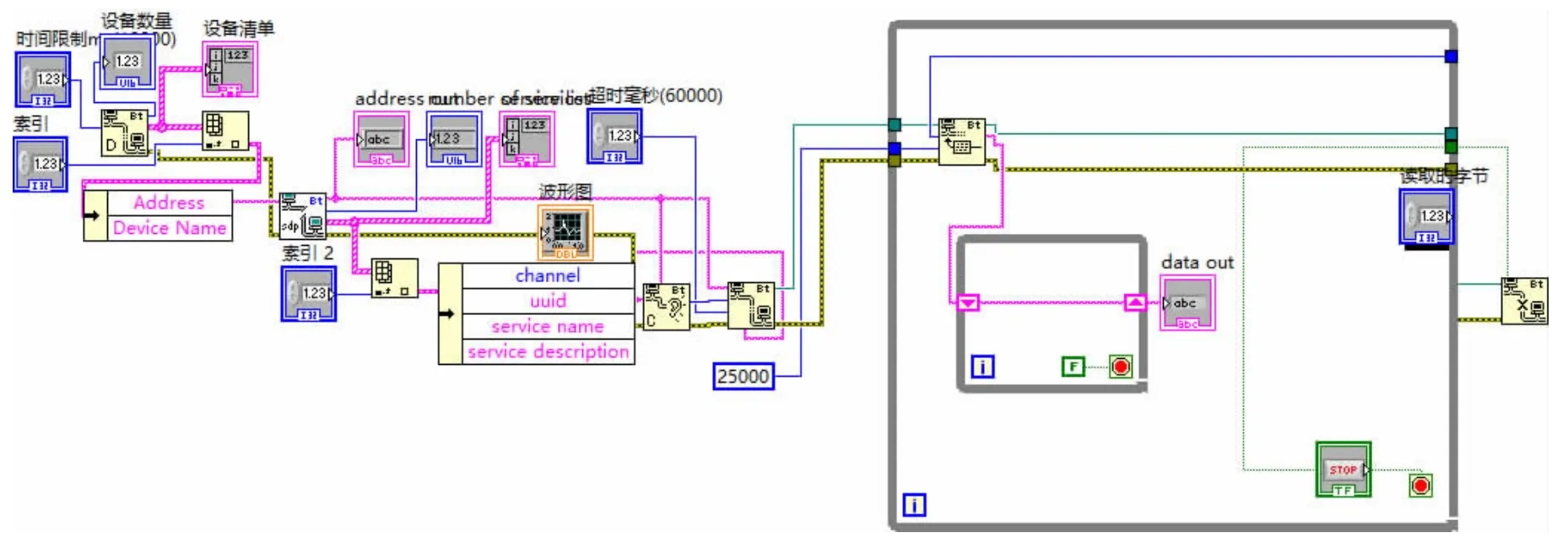
圖3 部分LabVIEW程序
TCD1206SUP會在φ1、φ2的下降沿輸出信號,它是雙通道的,TIM2_Channel1輸出信號的下降沿以及TIM2_Channel2的下降沿應該與TIM3輸出信號的下降沿對齊,這樣才能夠有效、及時地釋放出采集信號。在工作模式上將TIM1設置為主工作模式,而TIM2設置為從工作模式。TIM2的門控信號是TIM1的OCxRef,這是一個輸出信號,TIM1的輸出為低電平,參考輸出為高電平;否則輸出為高電平,參考輸出為低電平。這些工作條件是TIM1定時器的計數值小于它的計數器預裝載值。當定時器TIM1為高電平的參考電平時,TIM2處在正常工作狀態,反之,在前者處于低電平工作狀態時,后者將處于停止工作狀態,此時TIM1_Channel1通道將會輸出高電平狀態,所以應該始終使TIM2_Channel1的輸出電平為高電平。這一點是關注的重點部分,是整個驅動時序的關鍵,所以一定要控制好這兩個定時器在周期上始終是匹配的。
4 上位機軟件開發
上下位機的配對主要以主從的形式進行。在下位機部分主要是用藍牙模塊,使用它作為系統的從機部分,在通過上電之后,與MCU通信,同一時間上,還要等待和允許主機對藍牙模塊進行搜索。在上位機接口部分,所要求的程序由LabVIEW軟件編寫。在軟件部分,接口所需要的程序由LabVIEW圖形化軟件編寫。作為主機部分,上位機對下位機進行全面的搜索、搜索服務、建立連接、傳輸數據[8]。部分LabVIEW程序框圖如圖3所示。
5 結論
本文主要介紹了一種基于LabVIEW虛擬儀器機藍牙技術的CCD圖像采集系統。此系統解決了許多復雜的采集問題,實現了無線藍牙傳輸數據圖像采集。基于LabVIEW圖形化編程系統在應用上有很大的靈活性,后續功能升級方面的空間比較大。事實上,這個系統還可以作為其他系統來使用,例如光譜分析時就可以使用。
[1]王慶有.CCD應用技術[M].天津:天津大學出版社,2000.
[2]周根榮,姜平.一種基于高速超微型單片機的CCD驅動電路設計[J].電子技術應用,2006,32(3),105-107.
[3]劉書生,趙海.藍牙技術應用[M].沈陽:東北大學出版社,2001.
[4]趙凱生,劉爽,龍再川,等.基于ARM的線陣CCD測量系統分析[J].光電技術應用,2006,21(1):31-34.
[5]許秀貞,李自田,薛利軍.CCD噪聲分析及處理技術[J].紅外與激光工程,2004,33(4):343-346.
[6]王慶有.圖像傳感器應用技術[M].北京:電子工業出版社,2003.
[7]王華偉,劉波,曹劍中.CCD信號處理電路設計研究[J].科學技術與工程,2007,7(16):4153-4156.
[8]侯國屏,王坤,葉齊鑫.LabVIEW7.1編程與虛擬儀器設計[M].北京:清華大學出版社,2005.
A linear CCD image capture system based on virtual instrument and Bluetooth technology
Xu Linlin,Wang Tao
(College of Physics,Chongqing University,Chongqing 401331,China)
This text takes STM32F103 as the main control chip.It uses this chip to produce the timing drive of linear CCD.Also,it translates data via bluetooth technology.And it uses the virtual instrument programming software LabVIEW to develop the program on upper computer.In the end,it realizes a linear CCD image capture system,which can realize Bluetooth wireless data gathering,shorten development time and operate strongly in the software interface.
STM32;linear CCD;Bluetooth technology;LabVIEW;data acquisition
TP216
A
1674-7720(2015)10-0089-03
2014-09-28)
許林林(1989-),男,碩士研究生,主要研究方向:嵌入式系統與數據采集處理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
