基于電感數(shù)字轉(zhuǎn)換器的金屬探測小車設(shè)計(jì)
2015-10-21 00:16:02柳文強(qiáng)謝景衛(wèi)大連大學(xué)信息工程學(xué)院遼寧大連66大連大學(xué)素質(zhì)教育基地遼寧大連66
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2015年20期
柳文強(qiáng),謝景衛(wèi)(.大連大學(xué) 信息工程學(xué)院,遼寧 大連 66;.大連大學(xué) 素質(zhì)教育基地,遼寧 大連 66)
基于電感數(shù)字轉(zhuǎn)換器的金屬探測小車設(shè)計(jì)
柳文強(qiáng)1,謝景衛(wèi)2
(1.大連大學(xué) 信息工程學(xué)院,遼寧 大連 116622;2.大連大學(xué) 素質(zhì)教育基地,遼寧 大連 116622)
利用LDC1000電感數(shù)字轉(zhuǎn)換器設(shè)計(jì)了一個(gè)金屬探測小車。小車以MC9S12XS128單片機(jī)為控制核心,控制裝有LDC1000電感傳感器的擺臂左右擺動(dòng),進(jìn)行金屬探測。控制策略為先粗略掃描再精確定位,能在500mm×500mm的測試區(qū)域內(nèi)探測到探頭下方一定距離內(nèi)的特定金屬,并分辨出金屬的不同特性。該金屬探測小車探測精度高,測量信息準(zhǔn)確、穩(wěn)定,而且成本低,能適應(yīng)多種惡劣環(huán)境,在軍事領(lǐng)域、工業(yè)領(lǐng)域和安全領(lǐng)域都有很好的應(yīng)用前景。
LDC1000;MC9S12XS128;金屬探測;電感數(shù)字轉(zhuǎn)換器
0 引言
金屬探測器是利用金屬傳感器實(shí)現(xiàn)的能在一定范圍內(nèi)探測到是否有金屬物體并能對(duì)金屬物體進(jìn)行定位的儀器。由于采用非接觸式的感測技術(shù),使得金屬探測器在軍事、工業(yè)和安全等領(lǐng)域都有著廣泛的應(yīng)用,如地雷探測、食品質(zhì)量檢測、地鐵安檢等,也可用于農(nóng)村鄉(xiāng)鎮(zhèn)企業(yè)中化工、橡膠、制塑、食品加工、采礦、采煤等行業(yè),還可應(yīng)用于食品、藥品、玩具等領(lǐng)域[1]。目前,市場上大多數(shù)金屬探測器還是采用體積龐大、價(jià)格昂貴的電磁式金屬傳感器。相比之下,電感式數(shù)字金屬傳感器體積更小,價(jià)格更低,測量數(shù)據(jù)也更精確。
1 探測原理
1.1 LDC1000電感數(shù)字轉(zhuǎn)換器簡介
LDC1000是美國德州儀器(TI)公司研發(fā)的世界上首例實(shí)現(xiàn)了電感式感測的電感到數(shù)字化的轉(zhuǎn)換器。它通過以較低的系統(tǒng)成本提供優(yōu)于現(xiàn)有解決方案的性能、可靠性和靈活性,徹底地變革了感測技術(shù)。LDC1000提供了16位的諧振阻抗和24位的電感值,從而可在位置感測應(yīng)用中實(shí)現(xiàn)亞微米級(jí)的分辨率。另外,電感式感測還可耐受諸如污垢和灰塵等非導(dǎo)電干擾,并且支持布設(shè)遠(yuǎn)程傳感器,從而使其非常適合于嚴(yán)酷環(huán)境[2]。而且,此款電感傳感器體積非常小,使其能夠安裝在微型設(shè)備上成為可能;同時(shí),更小的體積給設(shè)計(jì)者保留了更充足的設(shè)計(jì)空間,應(yīng)用范圍也更加廣泛。
1.2 LDC1000電感感測原理
LDC1000電感感測探頭為一個(gè)自制線圈,在線圈中加上一個(gè)交變電流,線圈周圍會(huì)產(chǎn)生交變電磁場,如果有金屬物體進(jìn)入這個(gè)磁場時(shí),就會(huì)在金屬物體表面產(chǎn)生感應(yīng)電流,如圖1所示。感應(yīng)電流與線圈電流方向相反,感應(yīng)電流產(chǎn)生的感應(yīng)磁場與線圈的磁場方向相反。而感應(yīng)電流的大小與金屬物體的大小、成分、金屬物體與線圈的距離相關(guān)。
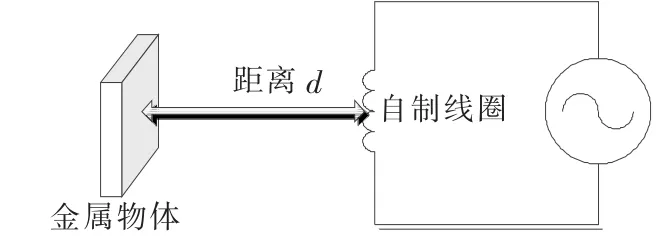
圖1 線圈的電磁感應(yīng)
如圖2所示,由于金屬物體與自制線圈的互感作用,在自制線圈這一側(cè)就可以檢測到金屬物體的參數(shù)。圖中Ls是自制線圈電感值,Rs是自制線圈的寄生電阻;L(d)是互感值,R(d)是互感寄生電阻,L(d)和R(d)都是距離d的函數(shù)。交變電流如果只加在電感(自制線圈)上,則在產(chǎn)生交變磁場的同時(shí)也會(huì)消耗大量的能量。這時(shí)將一個(gè)電容并聯(lián)在電感上,由于LC的并聯(lián)諧振作用,能量損耗大大減少,只會(huì)損耗在Rs和R(d)上,只要檢測到R(d)的損耗就可以間接地檢測到距離d。
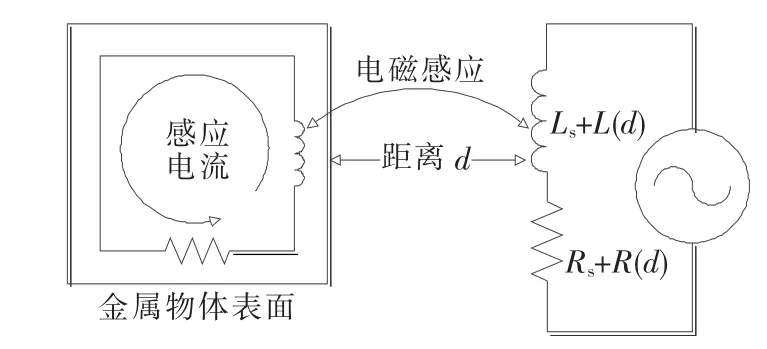
圖2 互感
LDC1000并不是直接檢測串聯(lián)的電阻,而是檢測等效并聯(lián)電阻。等效并聯(lián)電阻的計(jì)算公式為:

圖3為實(shí)測結(jié)果,測試點(diǎn)在線圈的兩級(jí),利用差分探頭可以在示波器上直接看到波形。可以看出,實(shí)測波形是正弦波,正弦波的頻率是諧振頻率。金屬遠(yuǎn)離線圈時(shí),由于沒有感應(yīng)電流的反向磁場,線圈的電感最大,諧振頻率最低(2.71MHz),如圖3(a)所示。當(dāng)金屬物體靠近時(shí),由于感應(yīng)電流產(chǎn)生的反向磁場,使線圈的等效電感下降,諧振頻率就會(huì)提高(3.01MHz),如圖3(b)所示。諧振LC中的電容C是已知的,所以根據(jù)諧振頻率就能計(jì)算出電感L值。根據(jù)衰減震蕩的曲線可以計(jì)算出并聯(lián)等效電阻Rp。
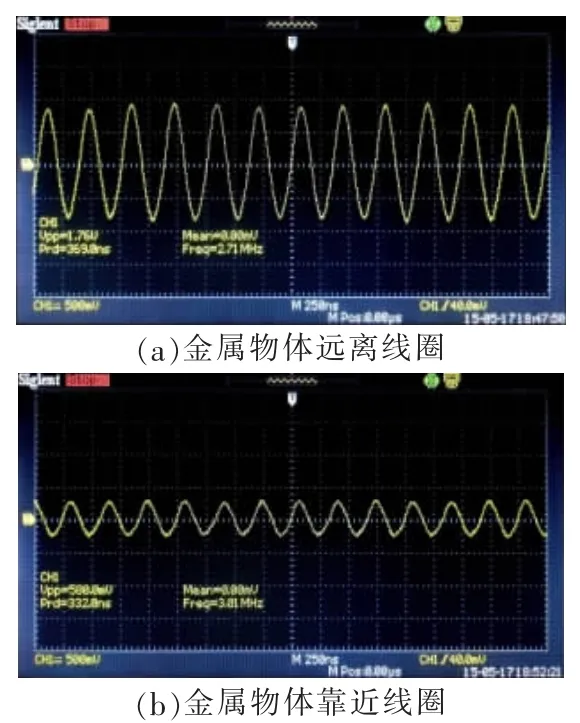
圖3 實(shí)測結(jié)果
2 總體設(shè)計(jì)
2.1 機(jī)械結(jié)構(gòu)
為了讓金屬探測小車結(jié)構(gòu)更簡單而又轉(zhuǎn)向靈活,小車采用雙驅(qū)動(dòng)輪加一個(gè)萬向輪的兩驅(qū)三輪車體結(jié)構(gòu)。兩個(gè)驅(qū)動(dòng)輪分別用單獨(dú)的電機(jī)來驅(qū)動(dòng),第三個(gè)輪起支撐作用。這種結(jié)構(gòu)可以使小車在較短的時(shí)間內(nèi)到達(dá)任意位置和角度。
為了使小車在同一位置掃描更大的區(qū)域,小車的前方裝有能左右旋轉(zhuǎn)180°的數(shù)字舵機(jī),舵盤上固定著長為300mm的擺臂,擺臂的末端固定著LDC1000傳感器。這樣就可以讓小車更快速地完成探測任務(wù),也為后來的控制算法提供了有力的保障。小車的機(jī)械結(jié)構(gòu)如圖4所示。
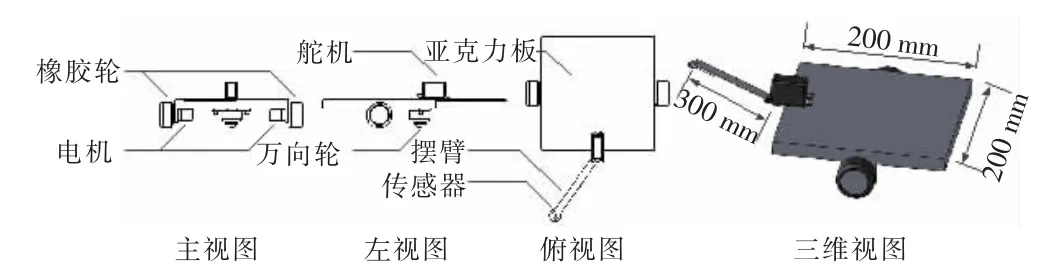
圖4 小車的機(jī)械結(jié)構(gòu)
2.2 系統(tǒng)結(jié)構(gòu)
金屬探測小車以飛思卡爾(Freescale)半導(dǎo)體公司的MC9S12XS128MAA單片機(jī)為主控芯片,該芯片由16位中央處理單元(CPU12X)、128KB程序Flash、8KB RAM、8KB數(shù)據(jù)Flash組成片內(nèi)存儲(chǔ)器,而且還集成了串行通信接口(SCI)、串行外設(shè)接口(SPI)、定時(shí)器模塊(TIM)和脈沖調(diào)制模塊(PWM)等豐富的片上資源[3]。小車用單片機(jī)內(nèi)的SPI模塊與LDC1000進(jìn)行通信,將傳感器采集到的數(shù)據(jù)讀取到單片機(jī)中,對(duì)數(shù)據(jù)進(jìn)行分析后,通過PWM模塊控制舵機(jī)轉(zhuǎn)動(dòng),進(jìn)行下一個(gè)位置點(diǎn)的探測。當(dāng)舵機(jī)轉(zhuǎn)到最小角度或最大角度時(shí),同時(shí)控制電機(jī)使小車向前運(yùn)動(dòng)一小段距離,然后舵機(jī)以反方向繼續(xù)轉(zhuǎn)動(dòng)。如此往復(fù),直到探測到目標(biāo)金屬物體,蜂鳴器發(fā)出提示音為止。系統(tǒng)功能圖如圖5所示。
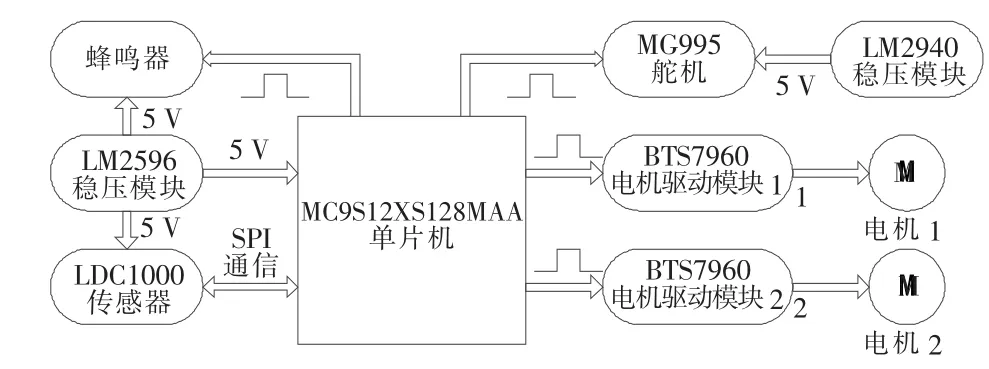
圖5 系統(tǒng)功能圖
2.3 控制算法
控制算法是整個(gè)系統(tǒng)的核心。一個(gè)好的控制算法不僅能夠保證系統(tǒng)穩(wěn)定工作,還能盡可能地提高金屬探測的精度。本金屬探測小車的控制算法總體思想為:先找到大概位置,再精確定位。
金屬探測小車以20ms為一個(gè)控制周期,即每20ms讀一次傳感器數(shù)據(jù),然后根據(jù)讀取的數(shù)據(jù)做出相應(yīng)的輸出。剛開始探測時(shí),小車把擺臂轉(zhuǎn)到最左邊。此后,在每個(gè)控制周期內(nèi),單片機(jī)從金屬傳感器讀取一次諧振阻抗數(shù)據(jù)(以下簡稱數(shù)據(jù)),并將此數(shù)據(jù)及對(duì)應(yīng)的舵機(jī)打角記錄下來,然后,擺臂向右轉(zhuǎn)動(dòng)大約1°,等待進(jìn)入到下一個(gè)控制周期。當(dāng)擺動(dòng)到最右端時(shí),小車向前移動(dòng)大約5mm,然后讀取傳感器數(shù)據(jù),記錄數(shù)據(jù)及對(duì)應(yīng)的舵機(jī)打角,擺臂向左轉(zhuǎn)動(dòng)大約1°,等待進(jìn)入到下一個(gè)控制周期。如此往復(fù),直到讀取回來的數(shù)據(jù)出現(xiàn)大幅度波動(dòng),這時(shí)就可以推斷出傳感器附近有金屬物體了。此時(shí),讓金屬探測小車?yán)^續(xù)掃描,直到數(shù)據(jù)幅值出現(xiàn)下降趨勢。再通過查找記錄下來的數(shù)據(jù),找到幅值最大時(shí)的小車位置及舵機(jī)打角,并將舵機(jī)轉(zhuǎn)動(dòng)到相應(yīng)的打角,然后進(jìn)入精確定位階段。
在精確定位階段,金屬探測小車還是以20ms作為一個(gè)控制周期。先讓舵機(jī)保持之前數(shù)據(jù)幅值最大時(shí)對(duì)應(yīng)的打角,然后在每個(gè)控制周期內(nèi)向后以1mm的間距移動(dòng)小車,并讀取諧振阻抗數(shù)據(jù),直到數(shù)據(jù)出現(xiàn)下降后停止向后移動(dòng)。此時(shí),舵機(jī)每個(gè)控制周期向右轉(zhuǎn)動(dòng)大約0.2°,并記錄下傳感器數(shù)據(jù),直到數(shù)據(jù)大小開始下降,然后,舵機(jī)每個(gè)控制周期向左轉(zhuǎn)動(dòng)大約0.2°,直到數(shù)據(jù)大小開始下降。
經(jīng)過一系列的實(shí)驗(yàn)與測試,得到了探測器探頭與硬幣中心之間的距離和諧振阻抗數(shù)據(jù)的關(guān)系,如圖6所示,測試所用的硬幣分別為一角硬幣(2005年版,不銹鋼,直徑為19mm)和一元硬幣(1999年版,鋼芯鍍鎳,直徑為25mm)。根據(jù)數(shù)據(jù)的幅值大小即可判斷硬幣種類。至此,金屬探測任務(wù)已經(jīng)完成,金屬探測小車發(fā)出“滴滴滴”的提示音。
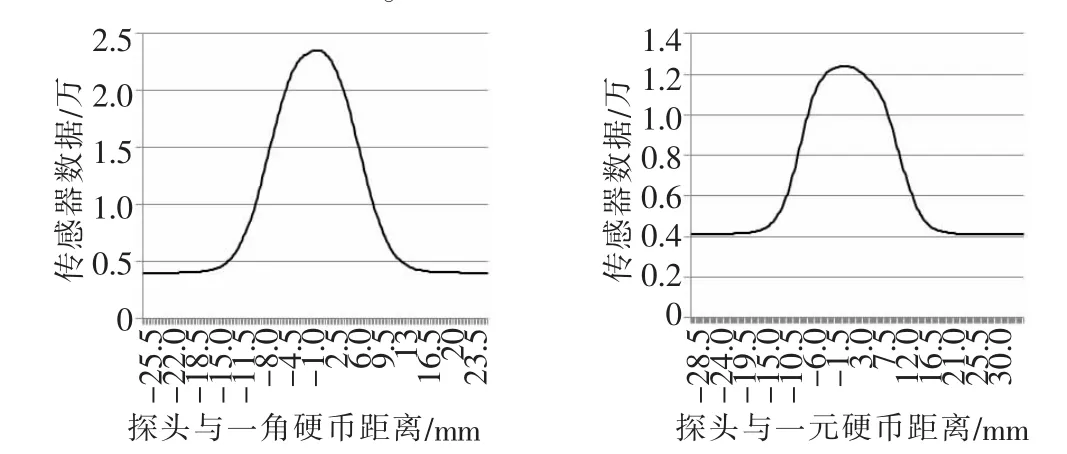
圖6 硬幣距探測器距離和傳感器數(shù)據(jù)關(guān)系圖
3 實(shí)際測試
3.1 測試方式
分別將一角硬幣和一元硬幣放在大小為500mm×500mm的測試區(qū)域內(nèi)的任一位置,測試區(qū)域上方覆蓋一層厚度為3mm的有機(jī)玻璃,將小車放在測試區(qū)域外,并將小車的方向朝向測試區(qū)。如圖7所示,打開小車電源開關(guān),小車開始金屬探測。記錄探測完成所需時(shí)間(探測用時(shí))及探頭中心與硬幣圓心之間的距離(探測誤差)。
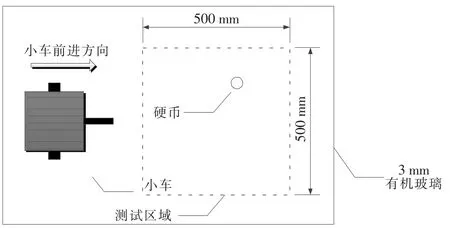
圖7 測試方法
3.2 測試結(jié)果
將金屬探測小車按照上述方法進(jìn)行實(shí)際測試,經(jīng)過5組測試后,將測試結(jié)果制成表格,如表1所示。根據(jù)測試數(shù)據(jù)可以看出,小車能夠在 2min內(nèi)完成探測任務(wù),并且能將探測誤差控制在5mm以內(nèi)。
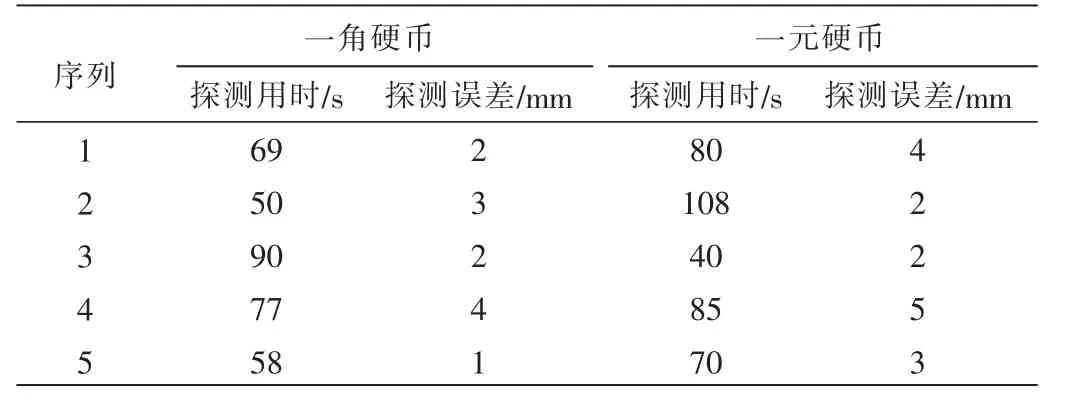
表1 測試結(jié)果
4 結(jié)論
本金屬探測小車能夠在2min之內(nèi)探測到500mm×500mm測試區(qū)域內(nèi)任意位置上的硬幣,并能將探測誤差控制在5mm以內(nèi),而且能夠分辨出硬幣類別。快速、精確是本金屬探測小車的特性,但由于電機(jī)齒輪、舵機(jī)齒輪有少許的空程,使之與理論上的控制精度有一些差別。如果小車使用更精密的電機(jī)和舵機(jī),將會(huì)進(jìn)一步減小探測誤差,使金屬探測小車更加完美。
[1]楊勇,曲曉東,劉志珍,等.一種改進(jìn)的高靈敏度金屬檢測系統(tǒng)[J].微型機(jī)與應(yīng)用,2014,33(17):23-25.
[2]單祥茹.TI首創(chuàng)電感數(shù)字轉(zhuǎn)換器滿足多領(lǐng)域應(yīng)用 [J].中國電子商情(基礎(chǔ)電子),2013(10):28.
[3]張陽,吳曄,騰勤.MC9S12XS單片機(jī)原理及嵌入式系統(tǒng)開發(fā)[M].北京:電子工業(yè)出版社,2011.
Design of metal detecting car based on inductive digital converter
Liu Wenqiang1,Xie Jingwei2
(1.College of Information Engineering,Dalian University,Dalian 116622,China;2.Quality Education Base,Dalian University,Dalian 116622,China)
This paper designed a metal detector car with the inductance-to-digital converter of LDC1000.The car′s MCU is MC9S12XS128,controlling the swinging arm with inductance-to-digital converter of LDC1000 to around side to side to detect metal. The Strategy is accurate positioning control after a rough scan.It can detect certain metals within a certain distance in the region of 500 mm×500 mm,and distinguish different properties of metals.This car has high metal detection precision and accurate measurement information.It is stable and low cost,and can adapt to a variety of harsh environments,and in the field of military industry has very good prospects and security areas.
LDC1000;MC9S12XS128;metal detector;inductive digital converter
TP23
A
1674-7720(2015)20-0090-03
柳文強(qiáng),謝景衛(wèi).基于電感數(shù)字轉(zhuǎn)換器的金屬探測小車設(shè)計(jì)[J].微型機(jī)與應(yīng)用,2015,34(20):90-92.
2015-05-27)
柳文強(qiáng)(1995-),男,本科,主要研究方向:計(jì)算機(jī)控制。
謝景衛(wèi)(1980-),通信作者,男,工程碩士,實(shí)驗(yàn)師,主要研究方向:計(jì)算機(jī)技術(shù)應(yīng)用。E-mail:21115098@qq.com。