永磁同步電機趨近率滑模控制
2015-10-21 01:17:38焦山旺施火泉湯一林
服裝學報 2015年3期
關鍵詞:系統
焦山旺, 施火泉, 湯一林
(江南大學輕工過程先進控制教育部重點實驗室,江蘇無錫214122)
永磁同步電機趨近率滑模控制
焦山旺, 施火泉*, 湯一林
(江南大學輕工過程先進控制教育部重點實驗室,江蘇無錫214122)
在永磁同步電機的矢量控制調速系統中,以永磁同步電機的數學模型為基礎,采用變速趨近率滑模控制和一般趨近率滑模控制分別設計了轉速調節器和電流調節器,通過李雅普諾夫穩定性理論證明了系統的穩定性。滑模控制器采用趨近率控制可以改善控制系統的動態品質。最后在Matlab/Simulink環境下搭建仿真模型并進行仿真驗證。結果表明,文中設計的滑模控制系統轉速響應快,杭干擾能力強。
永磁同步電機;矢量控制;變速趨近率;一般趨近率
永磁同步電動機(PermanentMagnet Synchronous Motor,PMSM)是常用的一種伺服電機[1]。目前PMSM調速系統中,在控制精度要求不高的情況下,普遍采用PID控制。由于PMSM是一個非線性、強耦合的系統,在實際應用中還存在參數變化、負載擾動等不確定性。因此,需要研究先進的控制方法來提高調速系統的控制性能。近年來,包括自適應控制、滑模控制等現代控制理論已被運用到PMSM調速系統中。滑模控制具有結構簡單、對參數變化和負載擾動有較強的魯棒性等優點[2-4]。但目前廣泛使用的趨近率控制,存在嚴重的抖振問題。為此,文獻[5]針對滑模控制系統的抖振問題,提出一種帶負載轉矩觀測器的電流滑模控制方法,很好地改善了系統電流跟蹤響應特性。文獻[6]引入終端吸引子概念,并在終端吸引子中引入狀態變量,使滑模趨近速度與狀態變量有關,很好地抑制了抖振。文獻[7]采用改進型變指數趨近率方法,一定程度上減少了系統的抖振,但其變速部分是不連續的。
在文獻[7]的基礎上,文中提出一種新型的變速趨近率控制用于速度環的控制。該趨近率控制運行軌跡在遠離滑模面時,趨近速度較大,而運行軌跡在滑模面附近時,趨近速度又變小。該新型趨近率控制可以很好地抑制抖振和提高系統的魯棒性。電流環采用一般趨近率控制,以有效減少電流波動,加快電流響應。
1 PMSM數學模型
PMSM在d,q坐標系下的數學模型[5]。
定子電壓方程:
電磁轉矩方程:

運動平衡方程:

其中:id,iq為定子電流在直軸和交軸上的分量;Ud, Uq為定子電壓在直軸和交軸上的分量;ω為電機轉子電角速度;θ為電機轉子位置;Rs為定子電樞電阻;Ld,Lq為電感在直軸和交軸上的分量;p為電機極對數;ψf為永磁轉子的磁鏈;J,B為電機轉動慣量和摩擦系數;TL為負載轉矩。
2 PMSM速度控制器設計
定義速度誤差為

其中,ω*為給定轉子電角速度;ω為實際轉子電角速度。由式(3)可得

選擇積分滑模面:

其中,c為積分滑模系數,c>0。選擇積分滑模面可以平滑轉矩,減小穩態誤差,具有抑制抖振的作用。變速趨近率為

其中,β,q>0,0<α<1,e1是速度誤差。˙s1=-qs1是指數趨近項,可以快速地到達滑模面:

在趨近滑模面上時,趨近速度趨近零,采用飽和函數可以使速度的變化是連續的,可以很好地抑制抖振。
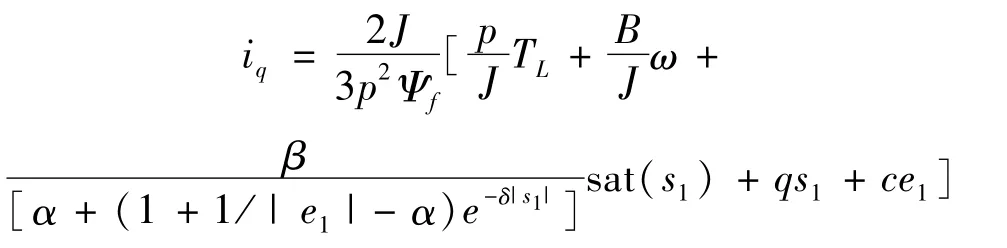
由式(5),(6),(7)可得控制量:
選取Lyapunov函數為V=s2/2,因為

所以,改進型變速指數趨近律滿足滑動模態存在性和到達條件,以及Lyapunov穩定性。
3 PMSM電流控制器設計
3.1 直軸電流控制器設計

選取積分滑模面:

其中c1>0。采用積分滑模面設計能夠消除系統狀態變量的穩態誤差,提高控制精確度。
采用一般趨近率控制,如下式:

其中,k1>0,q1>0,采用飽和函數可以有效地降低滑模控制帶來的抖振。
由式(8),(9),(10)可得控制量ud為

3.2 交軸電流控制器設計

選取積分滑模面:

其中c2>0。采用積分滑模面設計能夠消除系統狀態變量的穩態誤差,提高控制精確度,同時使得控制律中不存在狀態變量的二階導數,增強了控制器的穩定性[8-9]。
采用一般趨近率控制,如下式:

其中,k2>0,q2>0。
由式(11),(12),(13)可得控制量uq為


選取Lyapunov函數V1=2+,則

所以,電流環的一般指數趨近律滿足滑動模態存在性和到達條件,以及Lyapunov穩定性。
4 仿 真
為了驗證速度環、電流環滑模控制器的控制效果,采用id=0和SVPWM調制相結合的矢量控制, PMSM調速系統的系統如圖1所示。
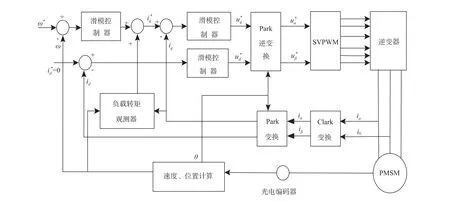
圖1 PM SM調速系統Fig.1 Diagram of the speed regulating system of PM SM
PMSM主要仿真參數如下:定子電阻Rs= 0.56Ω,直軸電感Ld=2.1 mH,交軸電感Lq= 2.1 mH,轉子磁通ψf=0.175 Wb,轉動慣量J= 3.6×10-4kg·m2,電機極對數p=4,阻尼系數B= 9.44×10-5N·m·s。
在新型趨近率滑模控制,和一般一趨近率控制兩種控制策略的情況下,在階躍給定轉速為300 rad/s帶3 N·m負載啟動時和突加4 N·m負載擾動時的速度響應如圖2,3所示,電流響應如圖4,5所示。
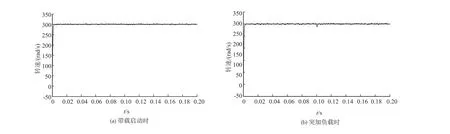
圖2 變速趨近率滑模控制轉速響應Fig.2 Speed response w ith the sliding m ode control based on the variab le rate reaching law

圖3 一般趨近率控制轉速響應Fig.3 Speed response w ith sliding m ode control based on reaching law

圖4 滑模控制電流響應Fig.4 Current response w ith the slidingmode control
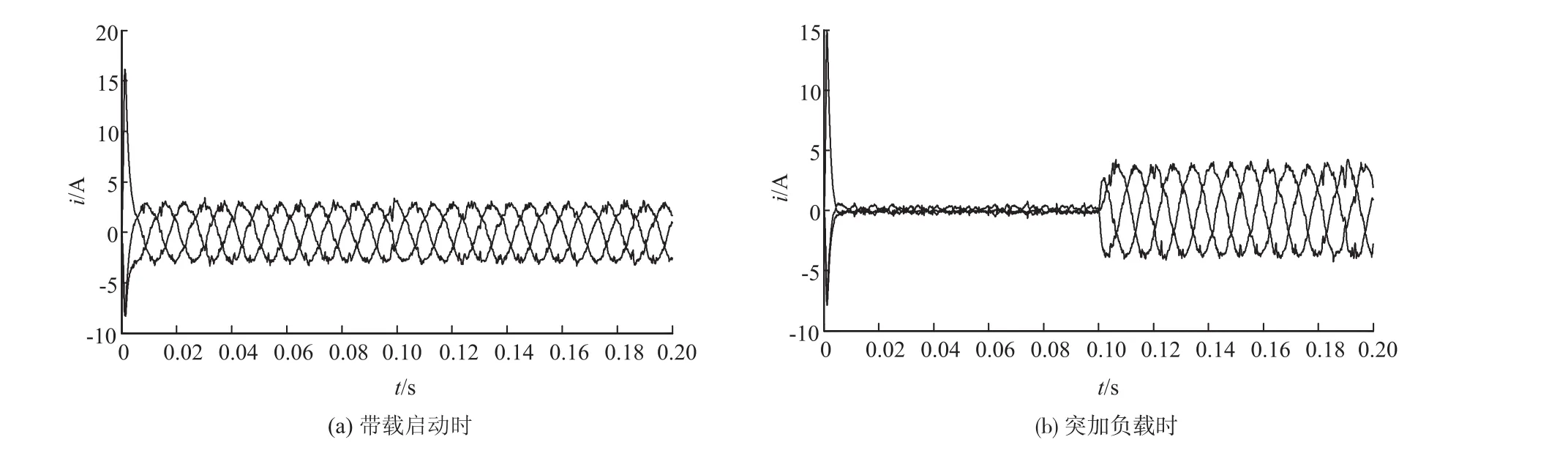
圖5 PID控制電流響應Fig.5 Current response w ith PID
由仿真結果可知:(1)在階躍給定轉速啟動時:由圖2(a)和圖3(a)可知,采用滑模雙環控制時,經過2.5 ms達到給定速度;而采用一般趨近率滑模控制時,需經過3 ms達到給定速度,而且,轉速波動明顯。在0.1 s突加4 N·m的負載時:由圖2(b)和圖3(b)可知,采用滑模雙環控制時,轉速突降到290 rad/s,轉速波動較小;采用一般趨近率滑模控制時,轉速突降到285 rad/s,且轉速波動明顯,即采用滑模雙環控制時,系統響應快,抗干擾能力較強。
(2)由圖4(a)和圖5(a)可知,電流環采用滑模控制時,啟動時的沖擊電流為14 A,啟動后電流的振蕩幅度較小;采用PID控制時,啟動時的沖擊電流為16 A,啟動后電流振幅明顯增大。由圖4(b)和圖5(b)可知,在突加負載時,采用滑模控制時的電流波動明顯比采用PID控制時的小。
5 結 語
針對PMSM調速系統,采用變速趨近率和一般趨近率分別設計了速度調節器和電流調節器,并進行了系統穩定性分析。仿真結果表明,與一般趨近率控制相比,采用變速趨近率控制的滑模控制可使電機速度快速準確地跟蹤給定信號,有效地抑制了控制量的抖振,并且對負載擾動具有較強的魯棒性。
[1]李珍國.交流電機控制基礎[M].北京:化學工業出版社,2009.
[2]李政,胡廣大,崔家瑞,等.永磁同步電機調速系統的積分型滑模變結構控制[J].中國電機工程學報,2014,43(3): 431-437.
LIZheng,HU Guangda,CUIJiarui,etal.Sliding-mode variable structure controlwith integral action for permanentmagnet synchronousmotor[J].Proceedings of the CSEE,2014,43(3):431-437.(in Chinese)
[3]Elmas C,Ustun O.A hybrid controller for the speed control of a permanent magnet synchronous motor drive[J].Control Engineering Practice,2008,16(3):260-270.
[4]劉治鋼,王軍政,趙江波.永磁同步電機神經網絡自適應滑模控制器設計[J].電機與控制學報,2009,13(2):290-295.
LIU Zhigang,WANG Junzheng,ZHAO Jiangbo.Neural network adaptive slidingmode control for permanentmagnet synchronous motor[J].Electric Machines and Control,2009,13(2):290-295.(in Chinese)
[5]金寧治,王旭東,李文娟.混合動力汽車永磁同步電機的電流滑模控制與負載擾動補償[J].汽車工程,2013,35(6): 553-558.
JIN Ningzhi,WANG Xudong,LIWenjuan.Current slidingmode control and load disturbance compensation of PMSM for hybrid electric vehicles[J].Automotive Engineering,2013,35(6):553-558.(in Chinese)
[6]張曉光,趙克,孫力,等.永磁同步電動機滑模變結構調速系統新型趨近率控制[J].中國電機工程學報,2011,31(24): 77-82.
ZHANG Xiaoguang,ZHAO Ke,SUN Li,et al.A PMSM sliding mode control system based on a novel reaching law[J]. Proceedings of the CSEE,2011,31(24):77-82.(in Chinese)
[7]童克文,張興,張星,等.基于新型趨近律的永磁同步電動機滑模變結構控制[J].中國電機工程學報,2008,28(21): 102-106.
DONG Kewen,ZHANG Xing,ZHANG Yu,et al.Sliding mode variable structure control of permanent magnet synchronous machine based on a novel reaching law[J].Proceedings of the CSEE,2008,28(21):102-106.(in Chinese)
[8]方一鳴,牛犇,張永潮,等.永磁同步電機轉速快速動態滑模控制[J].電機與控制應用,2012,39(4):43-47,50.
FANG Yiming,NIU Ben,ZHANG Yongchao,etal.Fast dynamic slidingmode control for speed of permanentmagnet synchronous motor[J].Electric Machines and Control Application,2012,39(4):43-47,50.(in Chinese)
[9]朱磊,溫旭輝,趙峰,等.永磁同步電機弱磁失控機制及其應對策略研究[J].中國電機工程學報,2011,31(18):67-72.
ZHU Lei,WEN Xuhui,ZHAO Feng,et al.Control policies to prevent PMSMs from losing control under field-weakening operation [J].Proceedings of the CSEE,2011,31(18):67-72.(in Chinese)
(責任編輯:楊 勇)
Exponential Reaching Law Sliding-M ode Control for Perm anent M agnet Synchronous M otors
JIAO Shanwang, SHIHuoquan*TANG Yilin
(Key Laboratory of Advanced Process Control for Light Industry,Ministry of Education,Jiangnan University,Wuxi 214122,China)
Based on the vector control technique,a speed current controller is designed by improving the exponential reaching law controlmethod and traditional exponential approach law method for permanentmagnet synchronousmotor speed control systems.The stability of the system is proved with the Lyapunov stability theory.The dynamic performance of the control system can be improved by using the sliding mode reaching rate control.Based on the mathematical model of the permanent magnet synchronous motor,the simulation model is designed with Matlab/Simulink software.The simulation results indicate that,the speed ofmotors could rapidly track the given speed with small fluctuation and small current harmonics,the control system has strong anti-interference ability.
permanentmagnet synchronousmotor,vector control,variable rate reaching law,reaching law
Email:shq@jiangnan.edu.cn
TM 351;TP 29
A
1671-7147(2015)03-0316-05
2014-11-18;
2014-12-22。
焦山旺(1988—),男,河南濮陽人,電氣工程專業碩士研究生。
*通信作者:施火泉(1962—),男,江蘇蘇州人,高級工程師,碩士生導師。主要從事電力電子與電力傳動研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32